Veoneer US NB24G1V2 VEHICLE RADAR SENSOR, REAR CROSS TRAFFIC ALERT User Manual WU8NB24G1V2 UserMan
Autoliv ASP, Inc. VEHICLE RADAR SENSOR, REAR CROSS TRAFFIC ALERT WU8NB24G1V2 UserMan
UserManual.wiki
>
Veoneer US
>
NB24G1V2 User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation


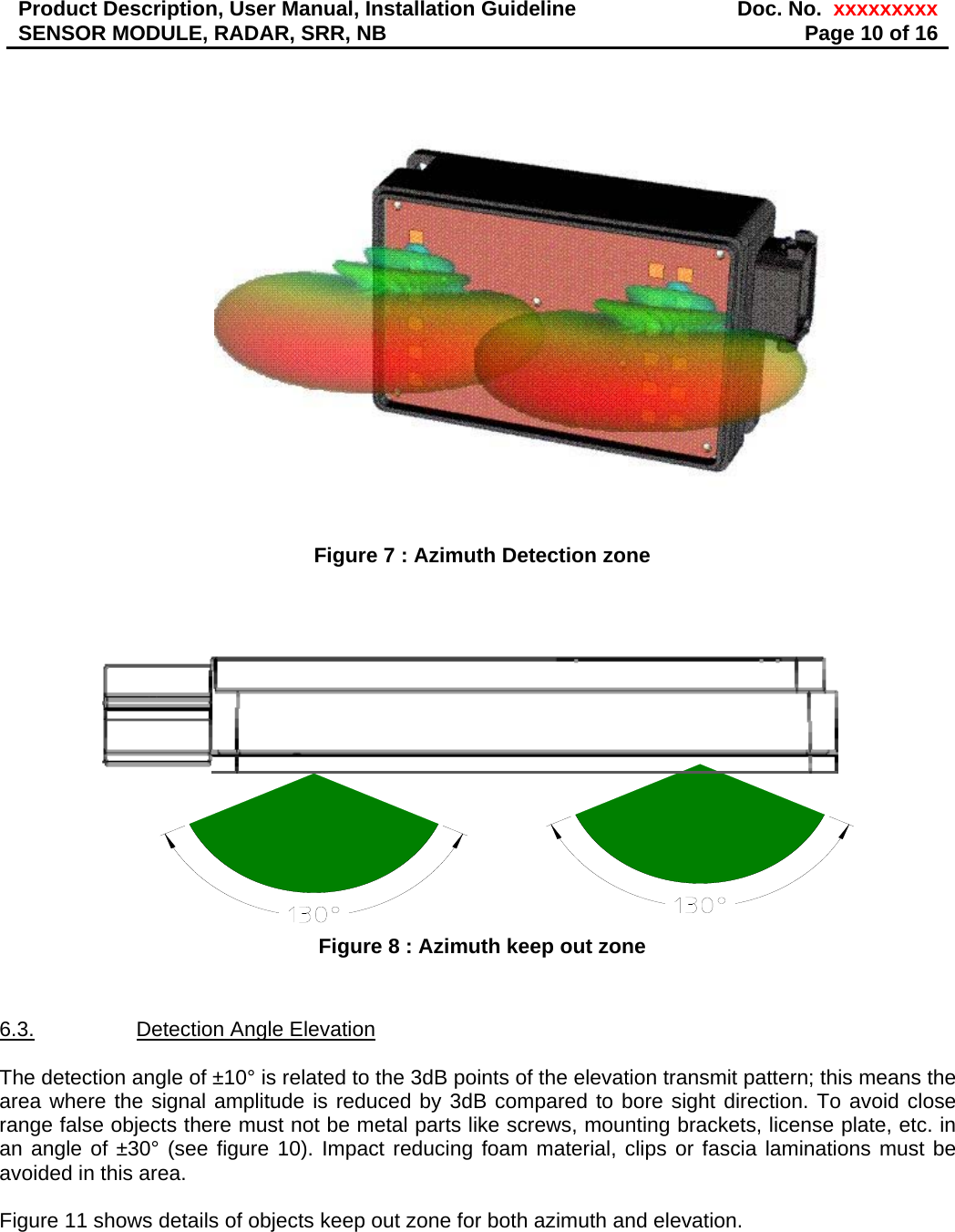
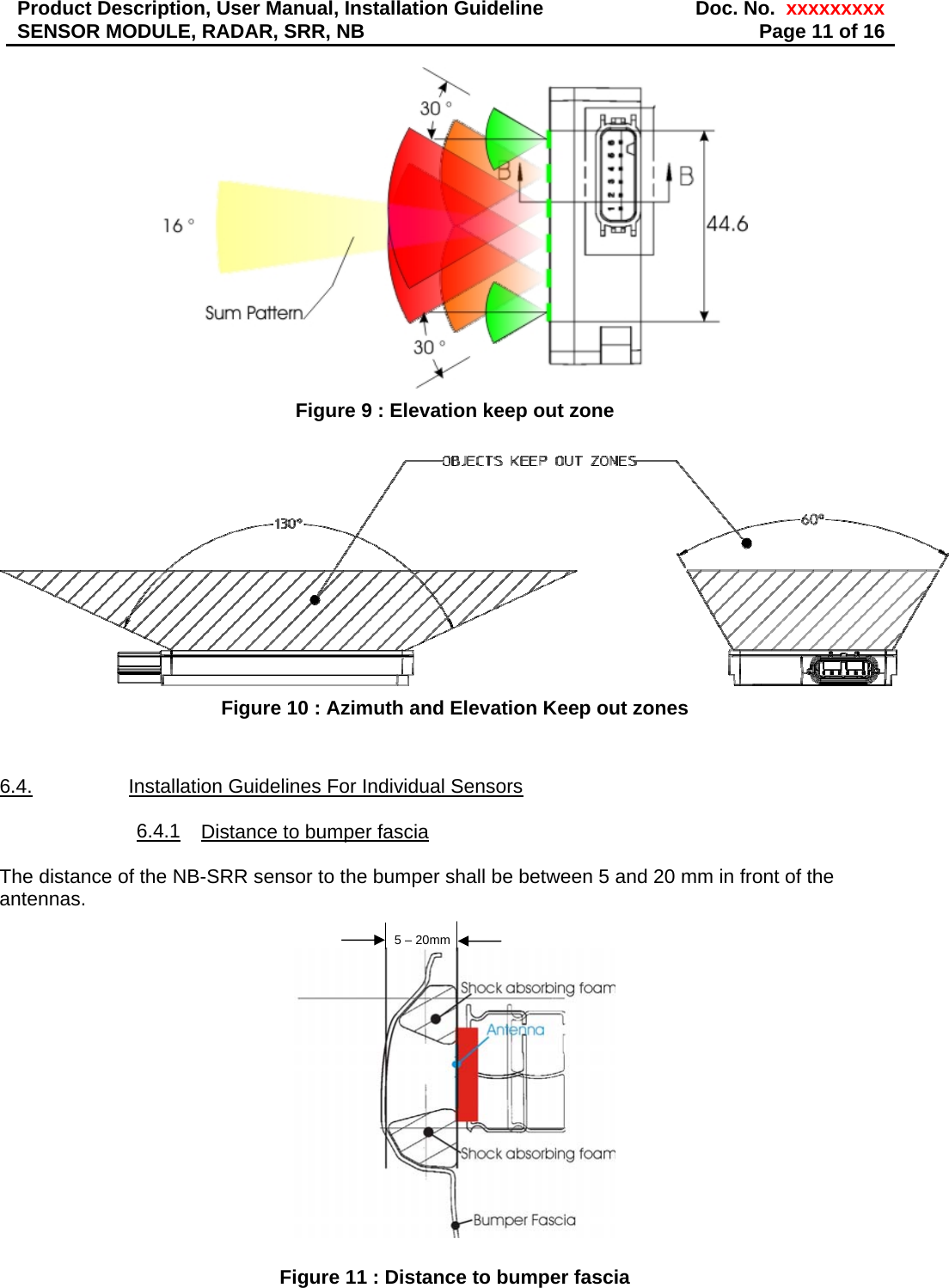
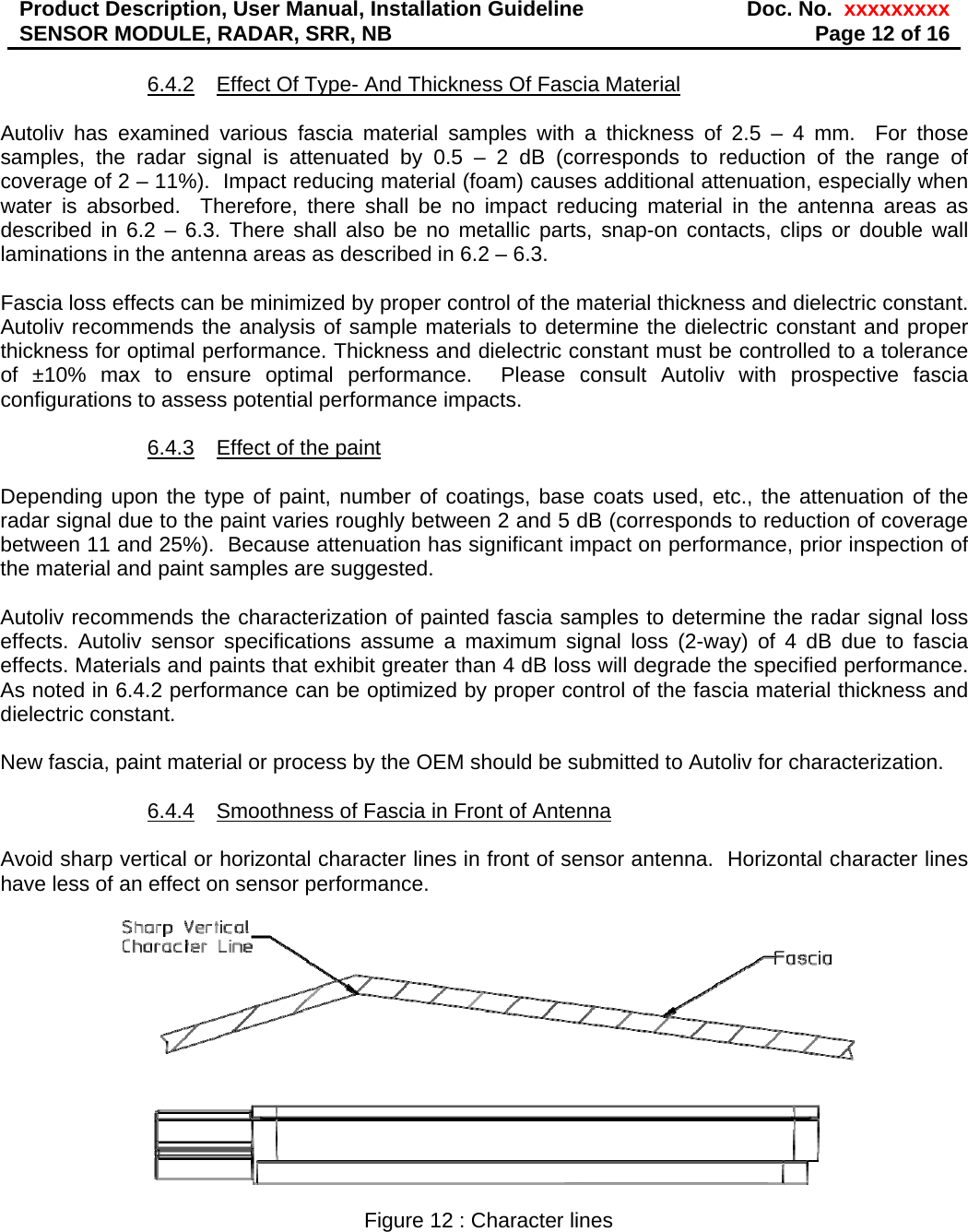
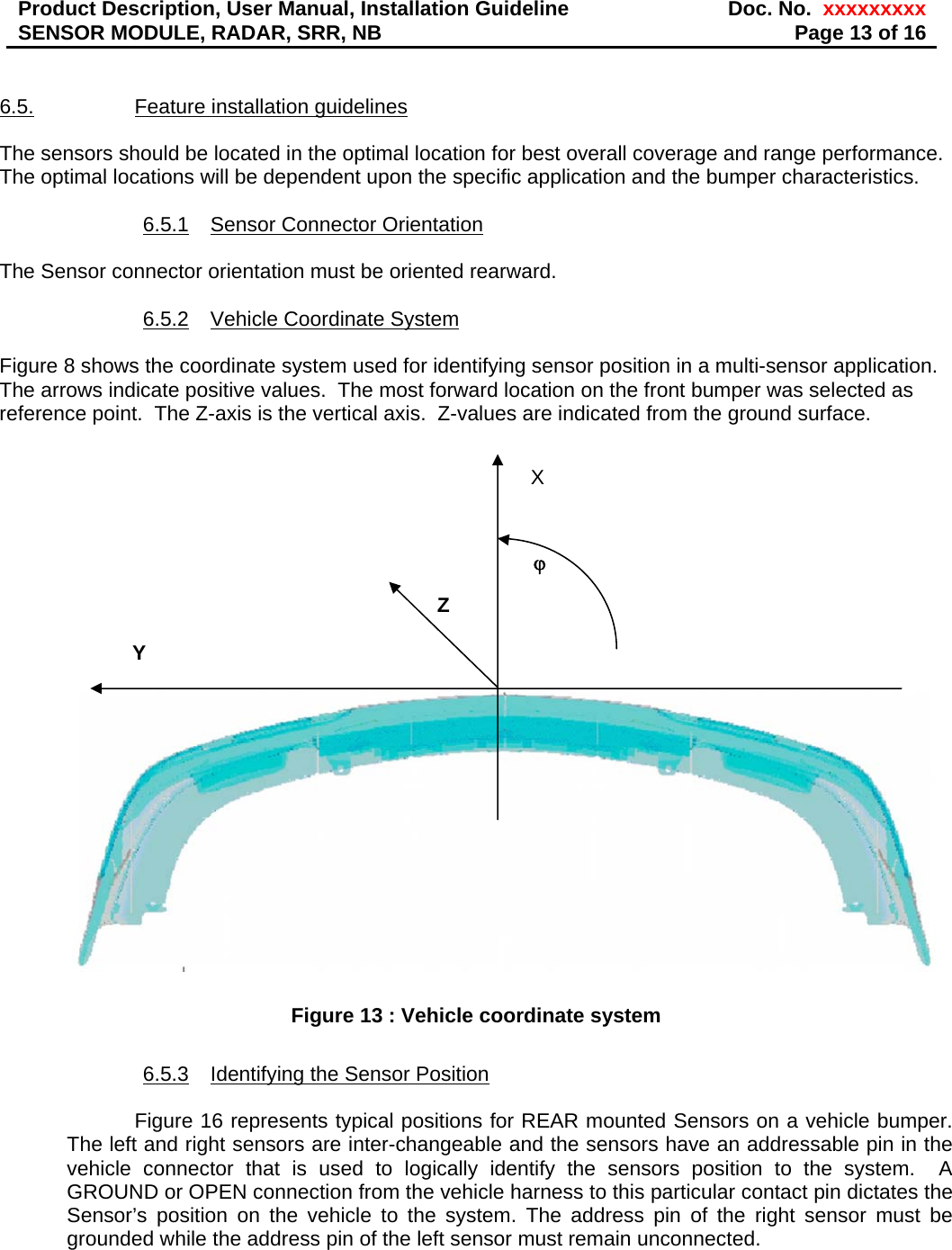
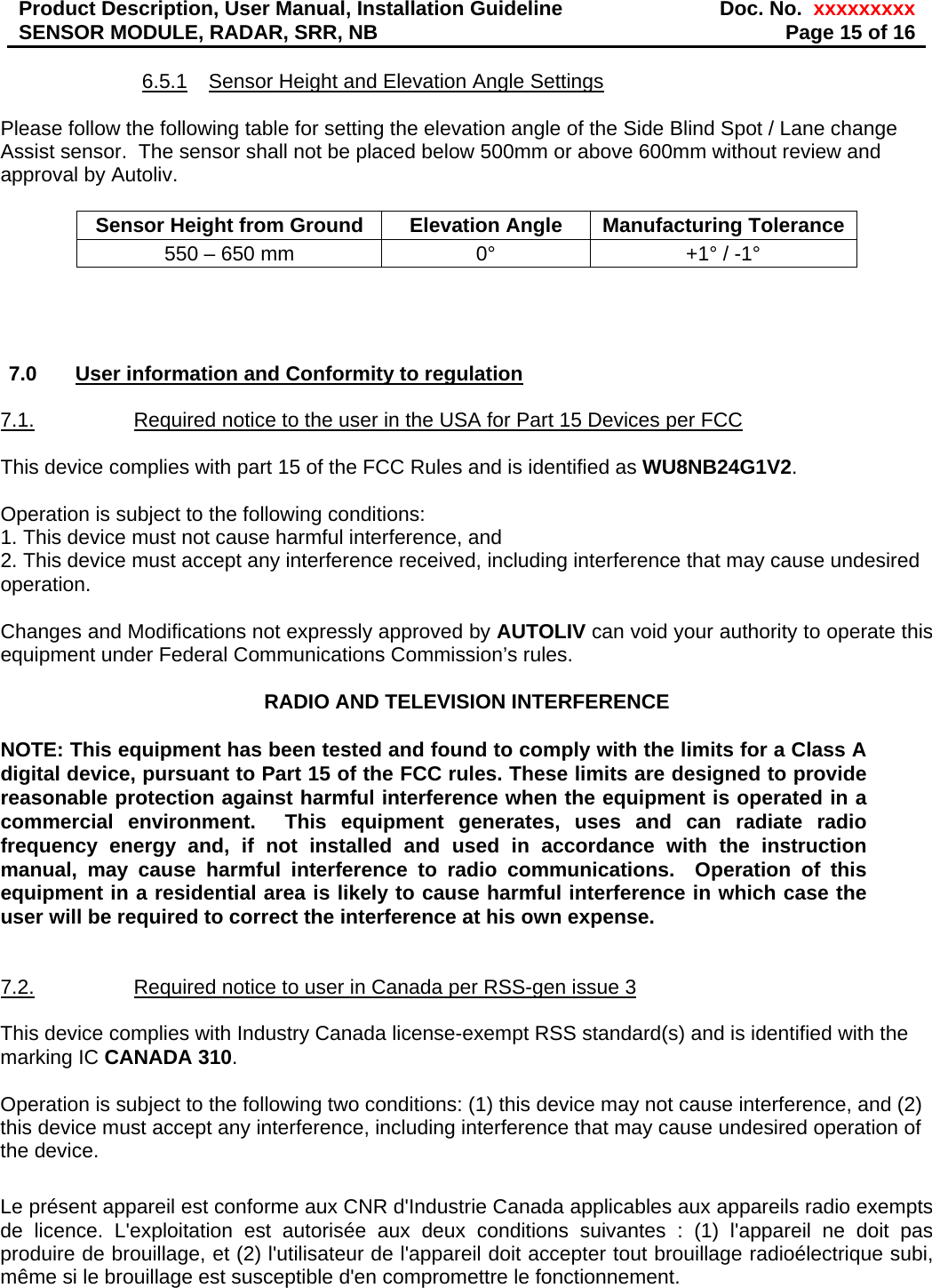
![Product Description, User Manual, Installation Guideline Doc. No. xxxxxxxxxSENSOR MODULE, RADAR, SRR, NB Page 14 of 16 Figure 14 : Sensor position 6.5.4 Y-direction recommendation The Y location of the sensors will determine the extent of the rear side Blind zone coverage. The location selections are highly dependent on the desired application and bumper dimensions. Bumper features (chrome trim, badges, etc.) may not allow this while maintaining the guidelines of section 5. In this case the locations should be as close to the ideal locations as possible while meeting the requirements of section 5. A measurement check is required to verify the actual installation implementation. 6.5.5 X-direction recommendation In general, the X locations will be dictated by the contour of the bumper and the installation guidelines of section 5. However, each sensor should be located as far rearward as possible while maintaining other packaging requirements (radome to fascia B-side, angle, etc.). 6.5.1 Sensor Azimuth Angle (X-Y Plane) Each sensor shall be angled 50° +/-1deg rearward. 6.5.2 Elevation Angle recommendation Preferably, the elevation angle of the sensors shall be 0 deg [+1° / -1°] with respect to the ground (sensor white cover surface perpendicular (90°) to the ground). Right Left Driving direction](https://usermanual.wiki/Veoneer-US/NB24G1V2/User-Guide-2208653-Page-13.png)