Symeo PLB000998 Model PLB000998 User Manual
Symeo GmbH Model PLB000998 Users Manual
UserManual.wiki
>
Symeo
>
PLB000998 User Manual
Users Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation
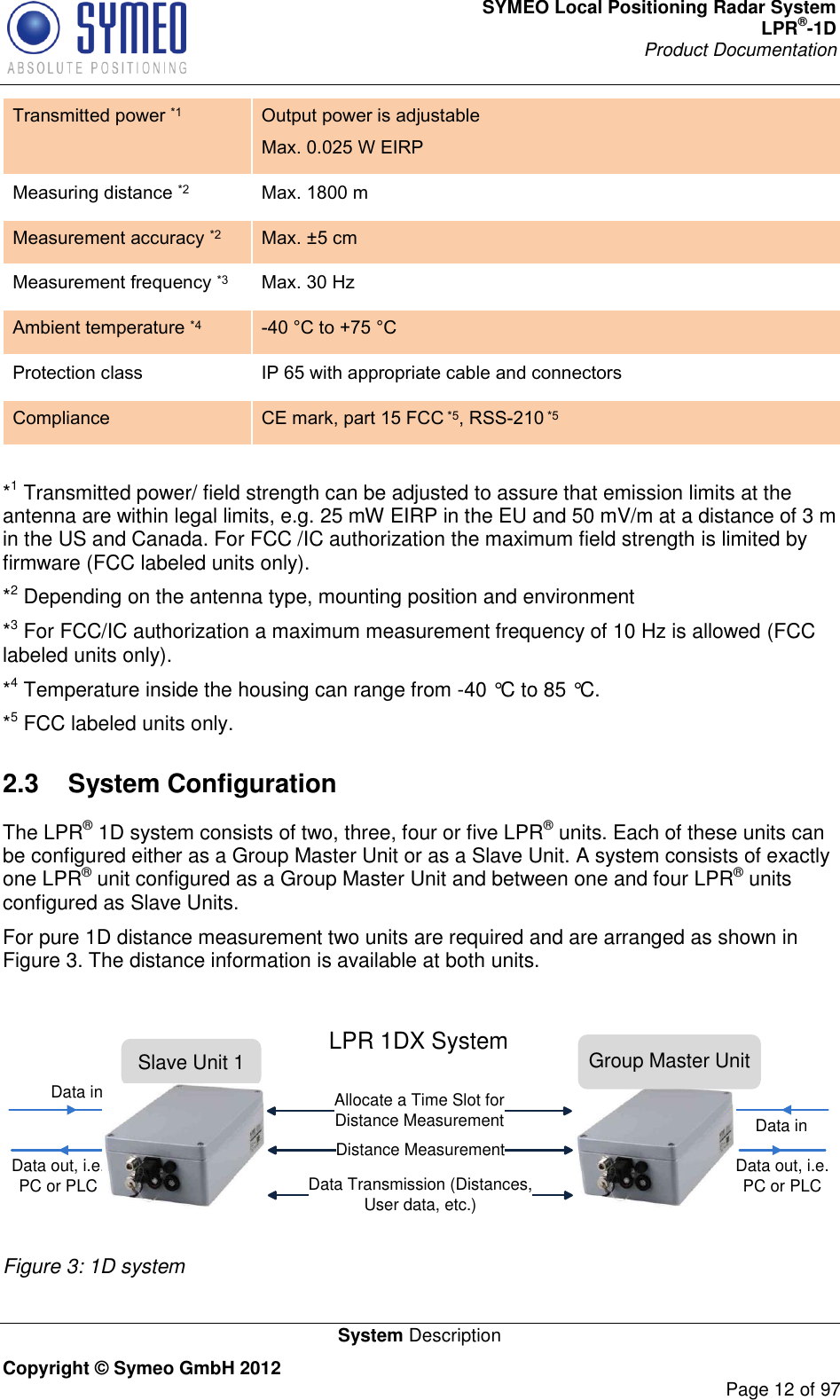
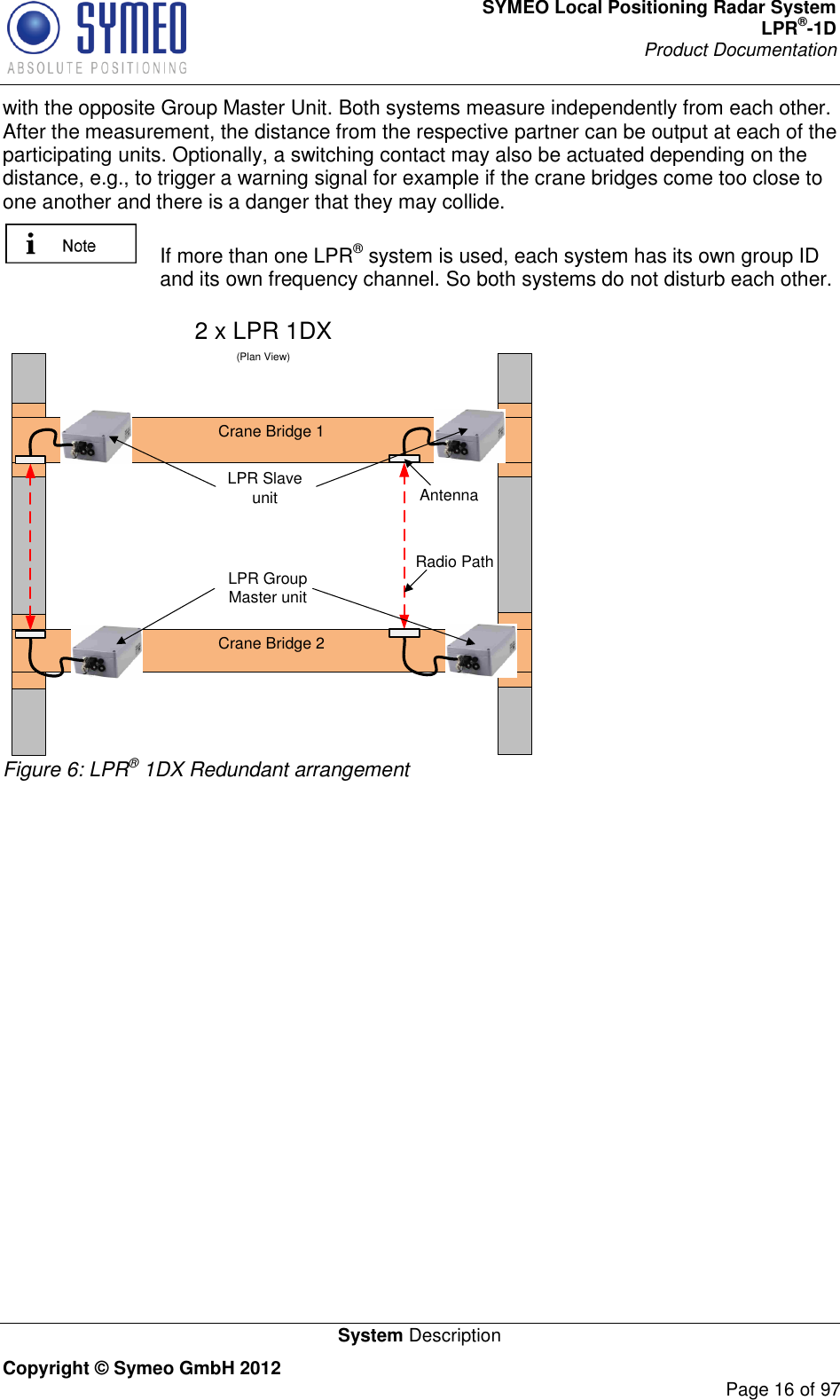
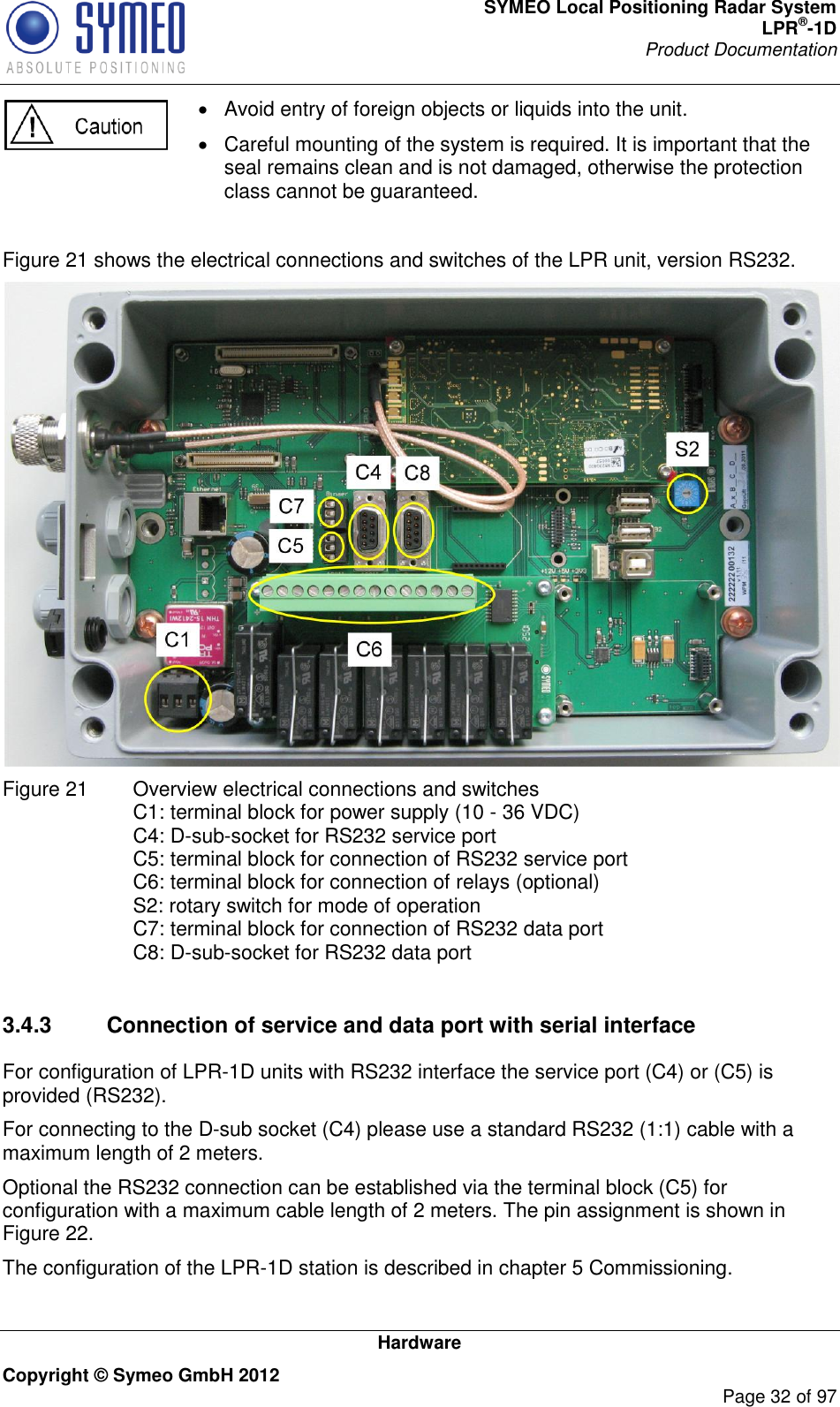
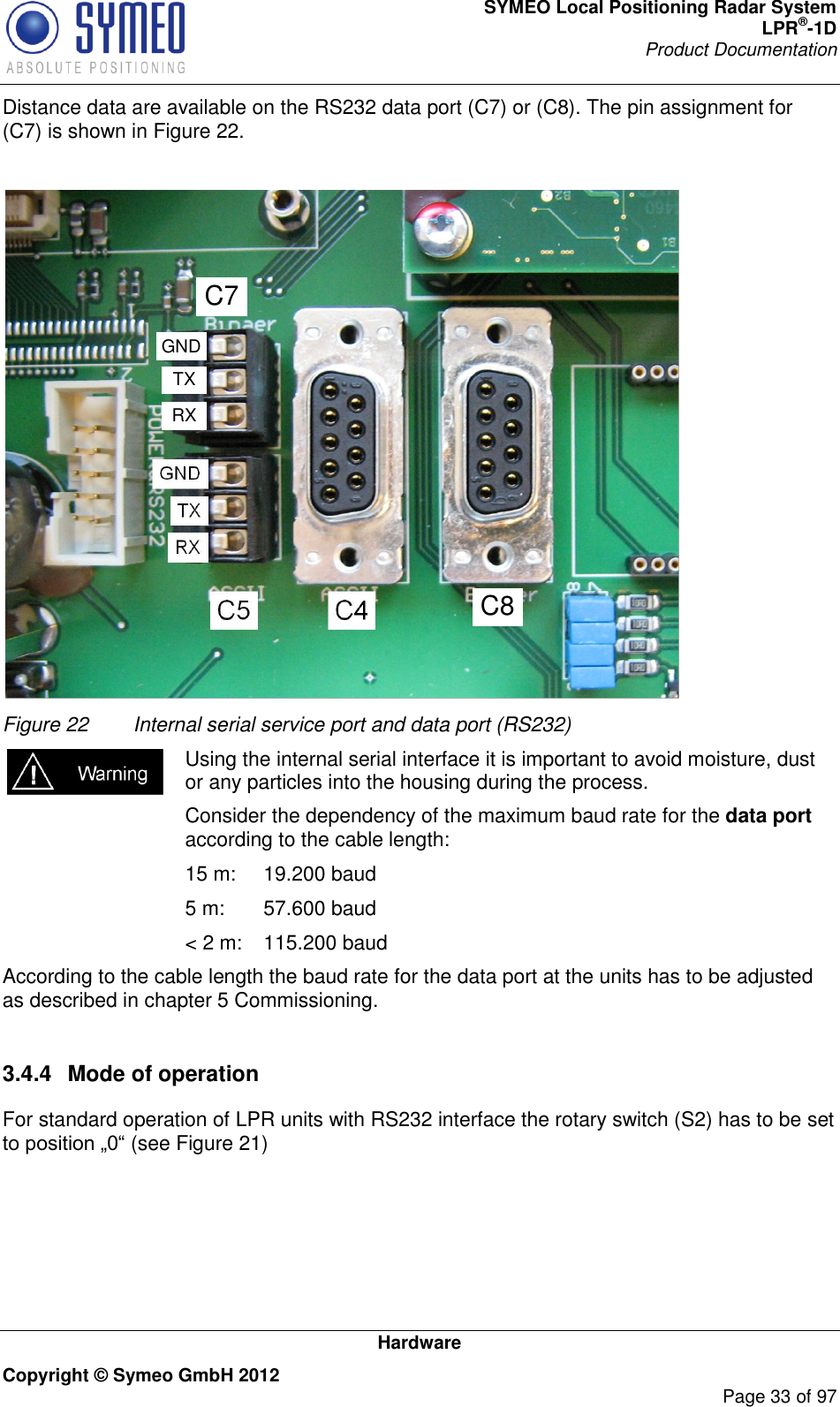
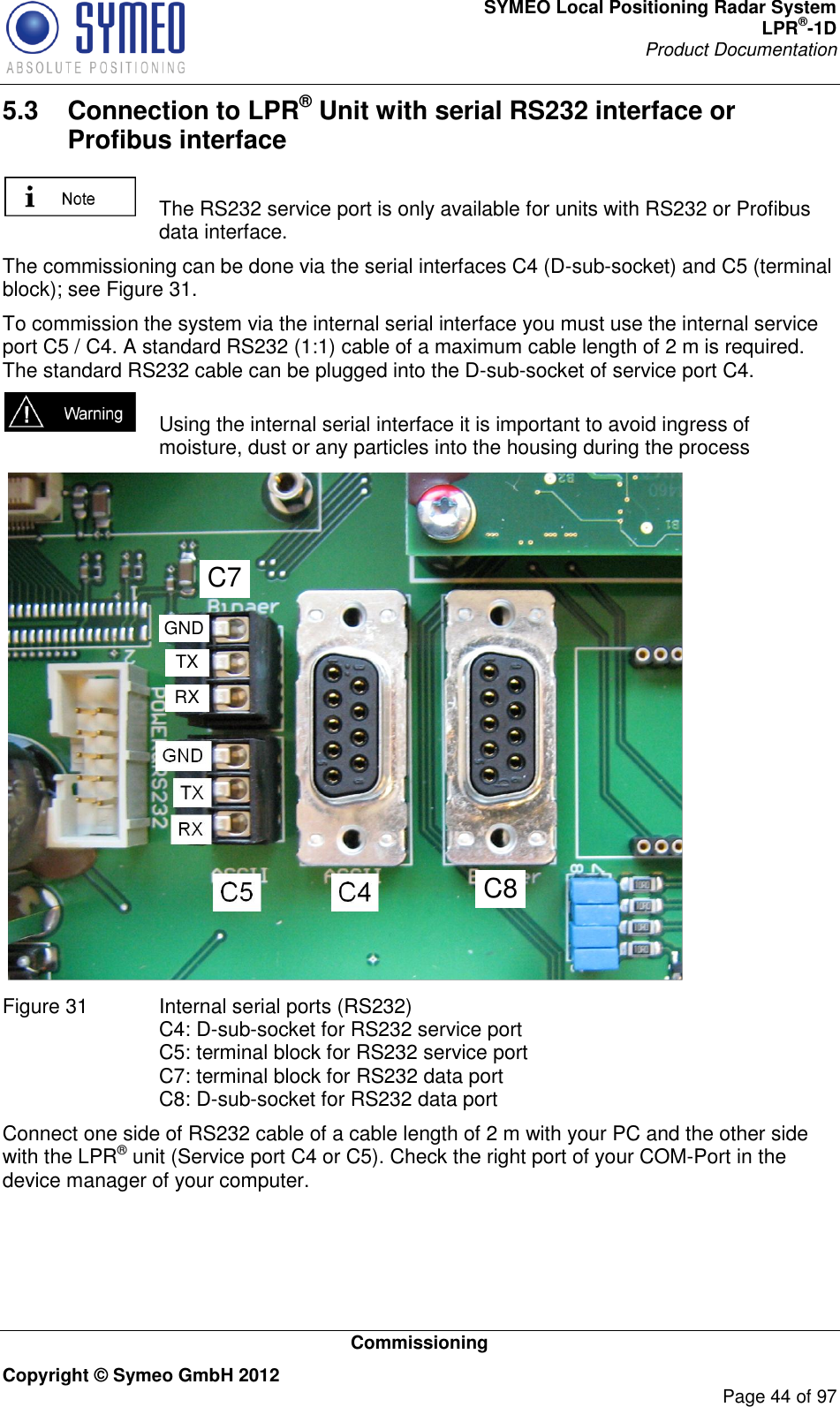
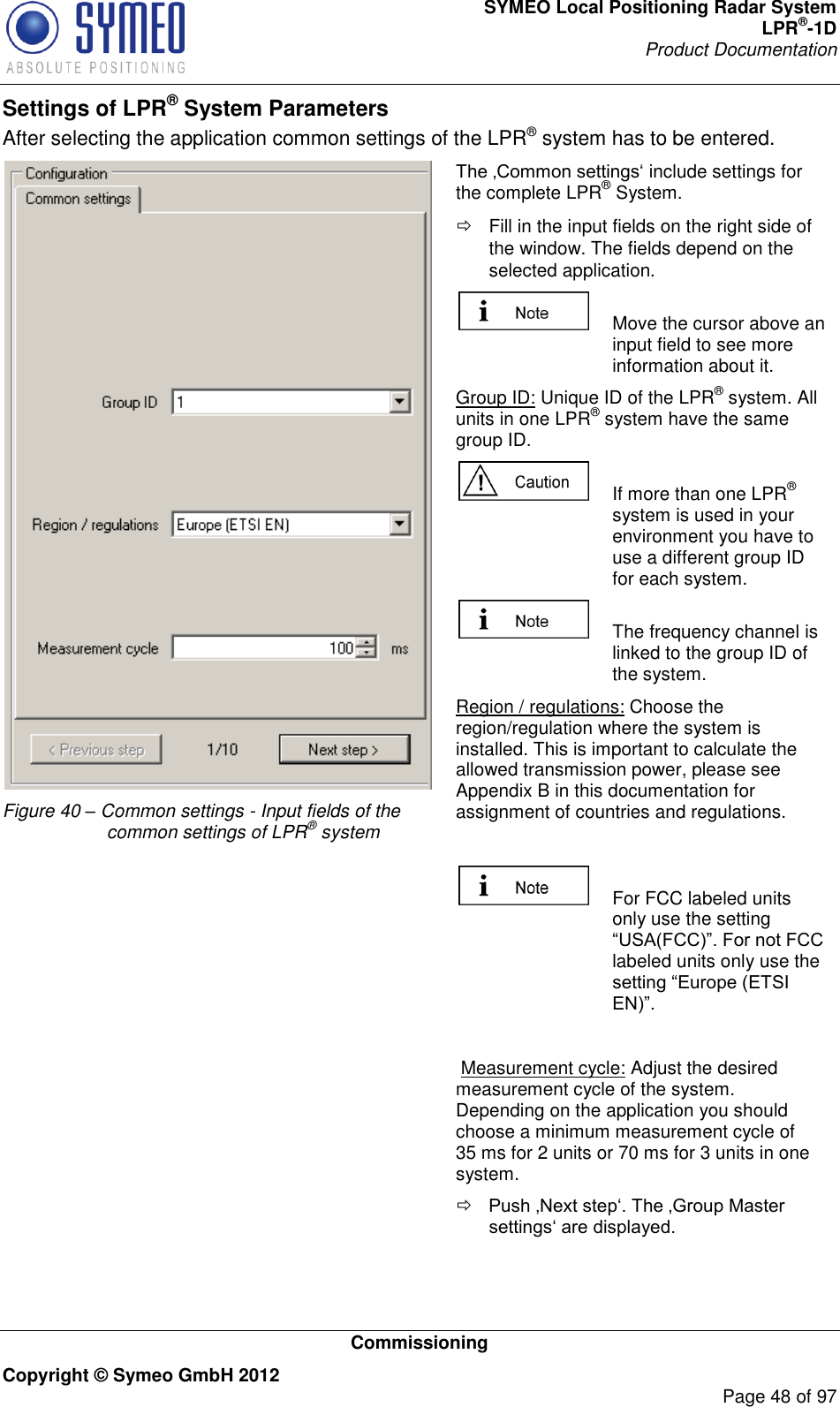
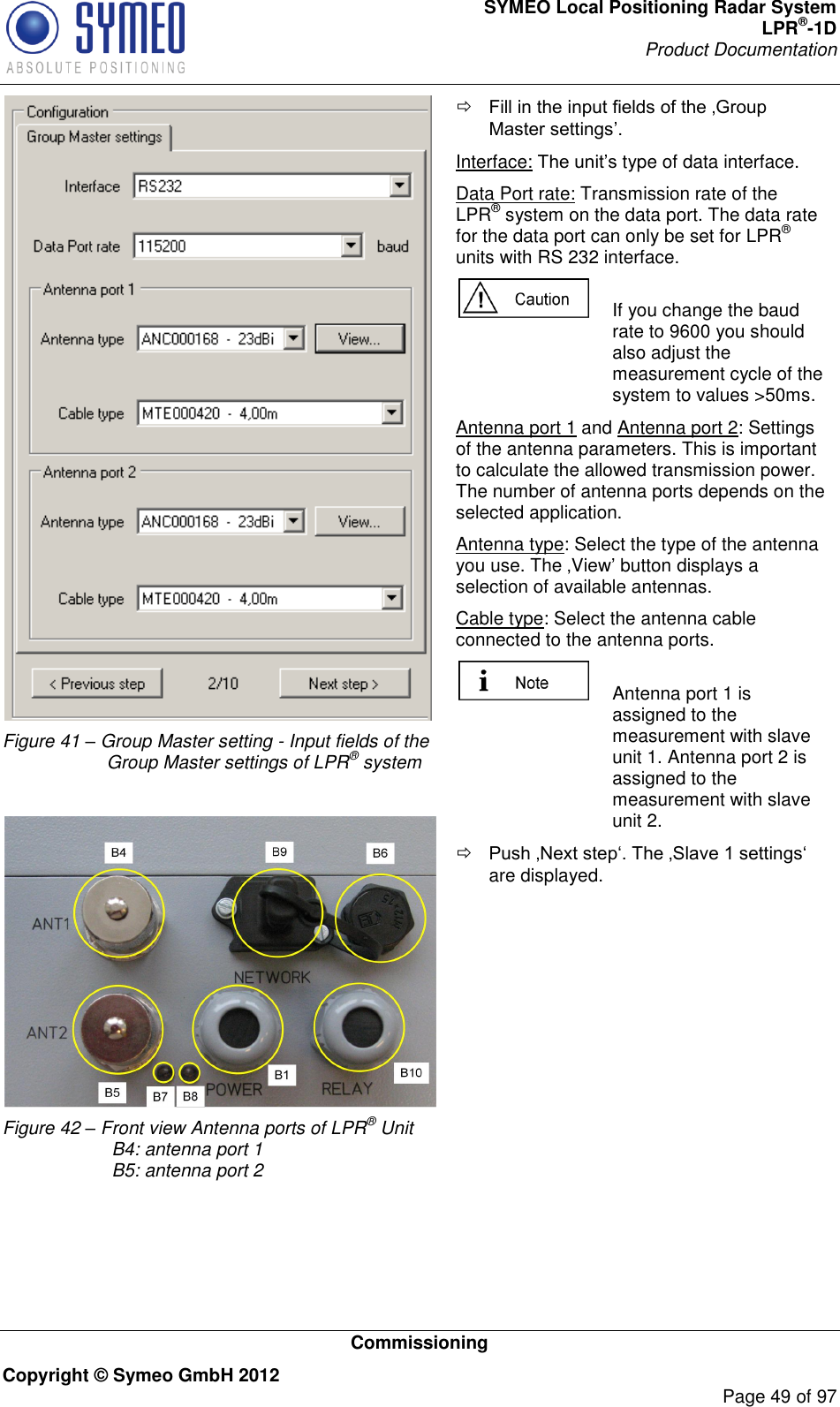
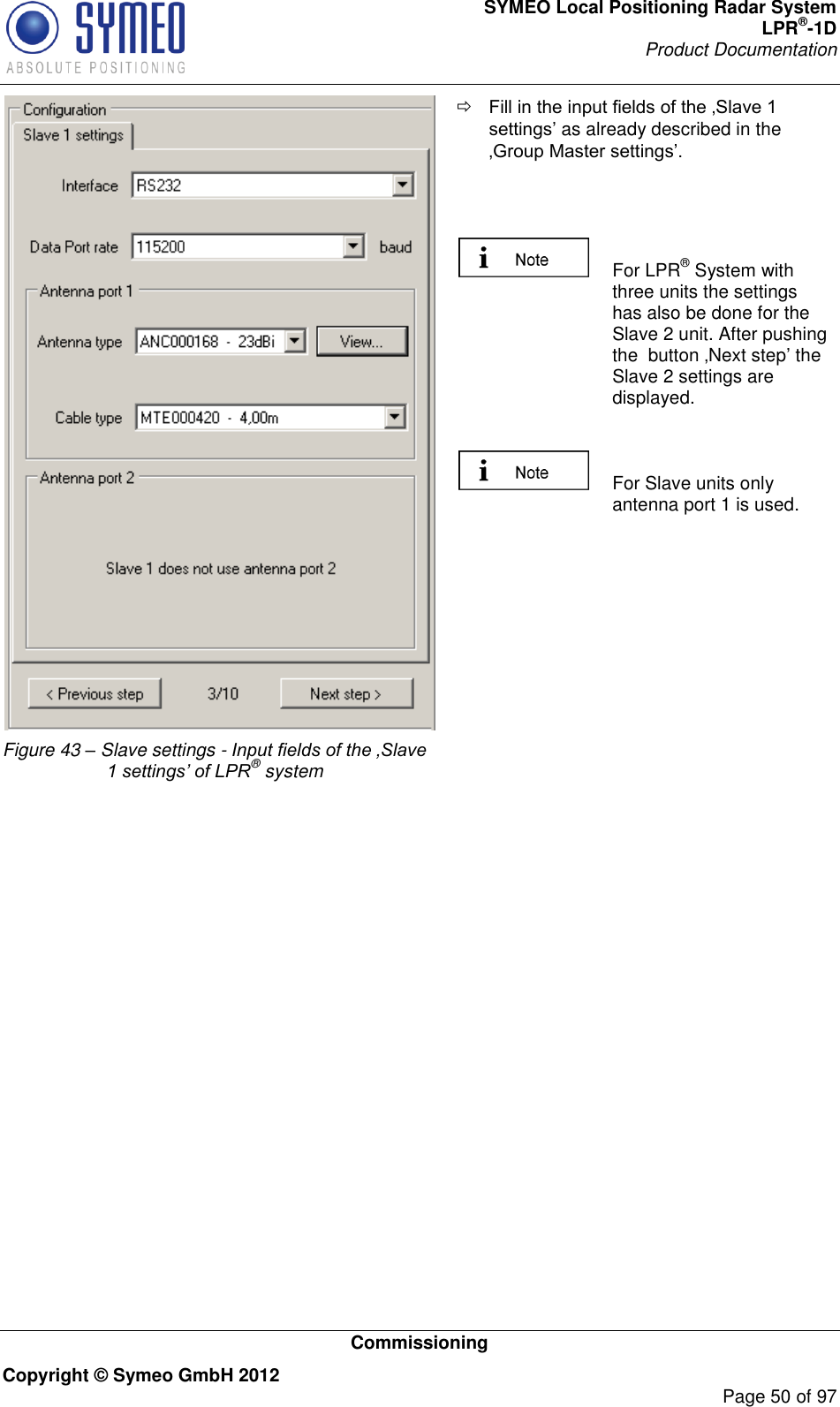
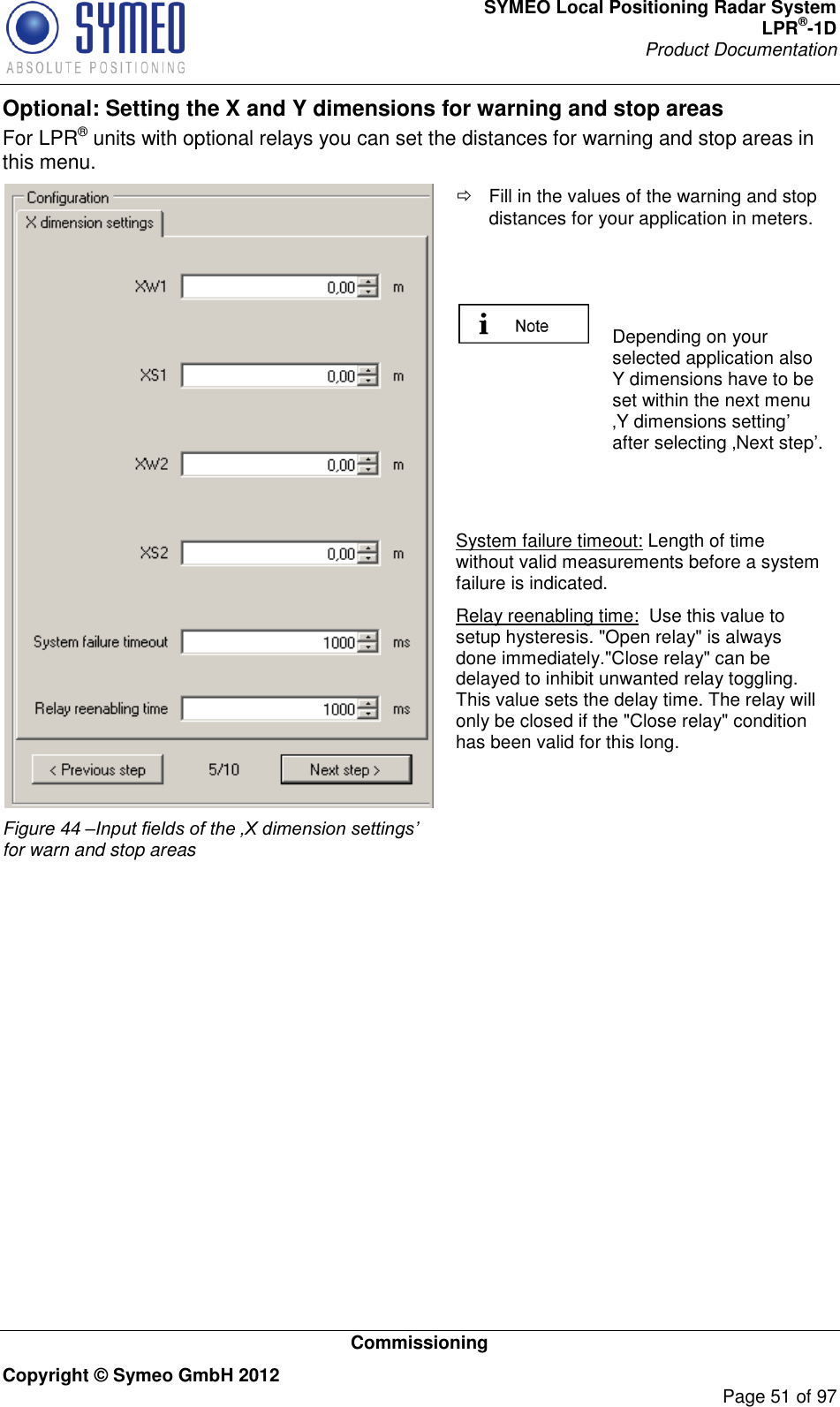
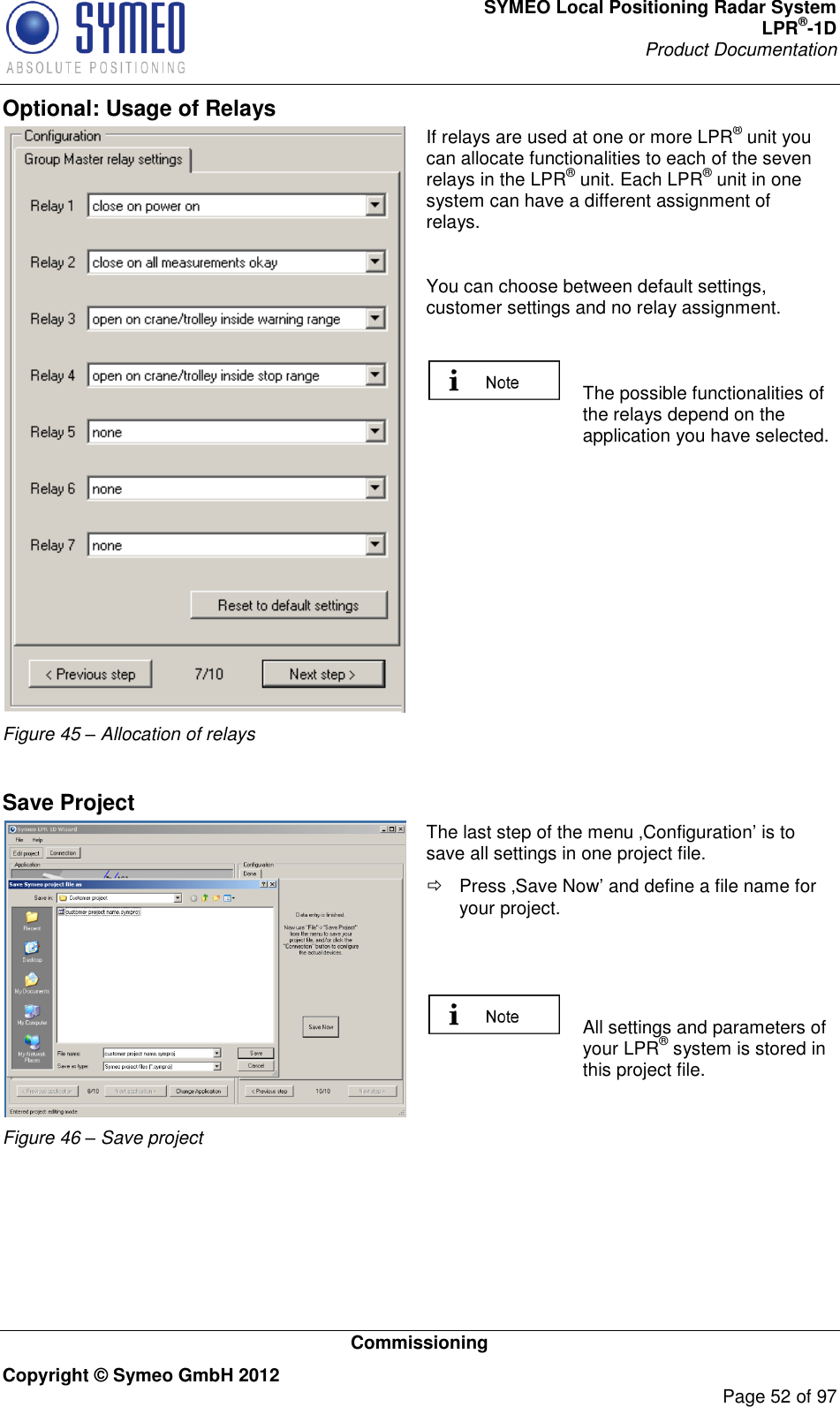
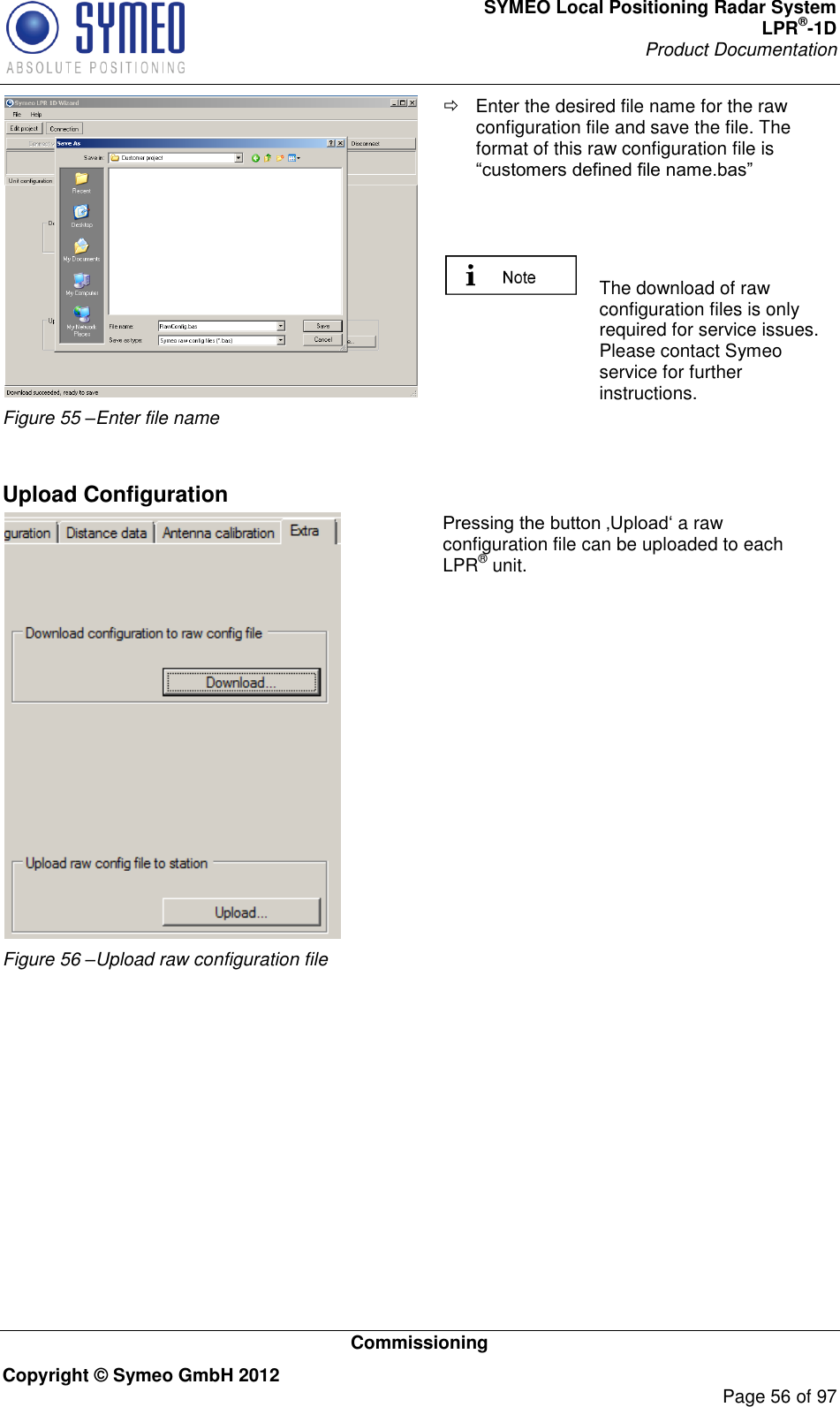
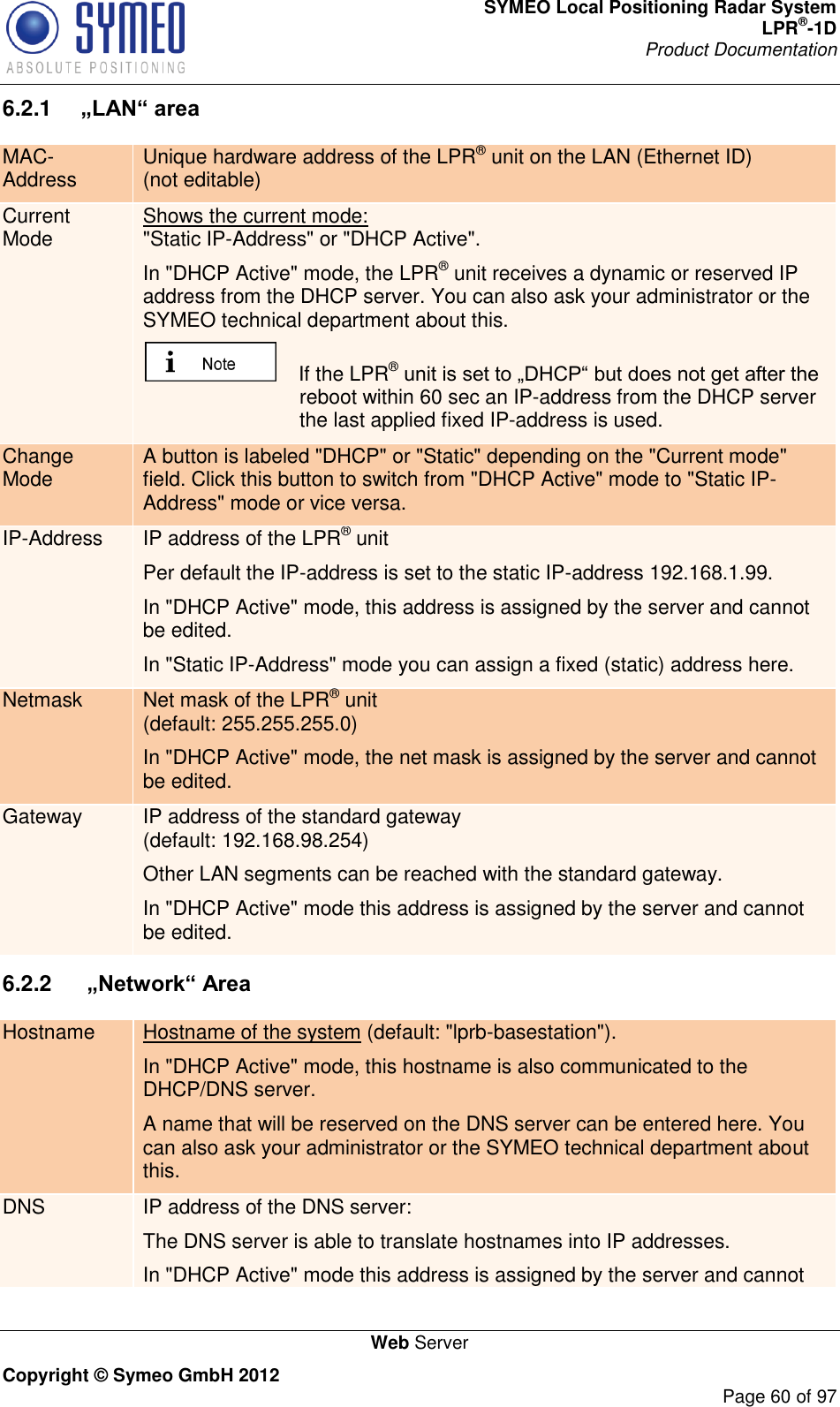
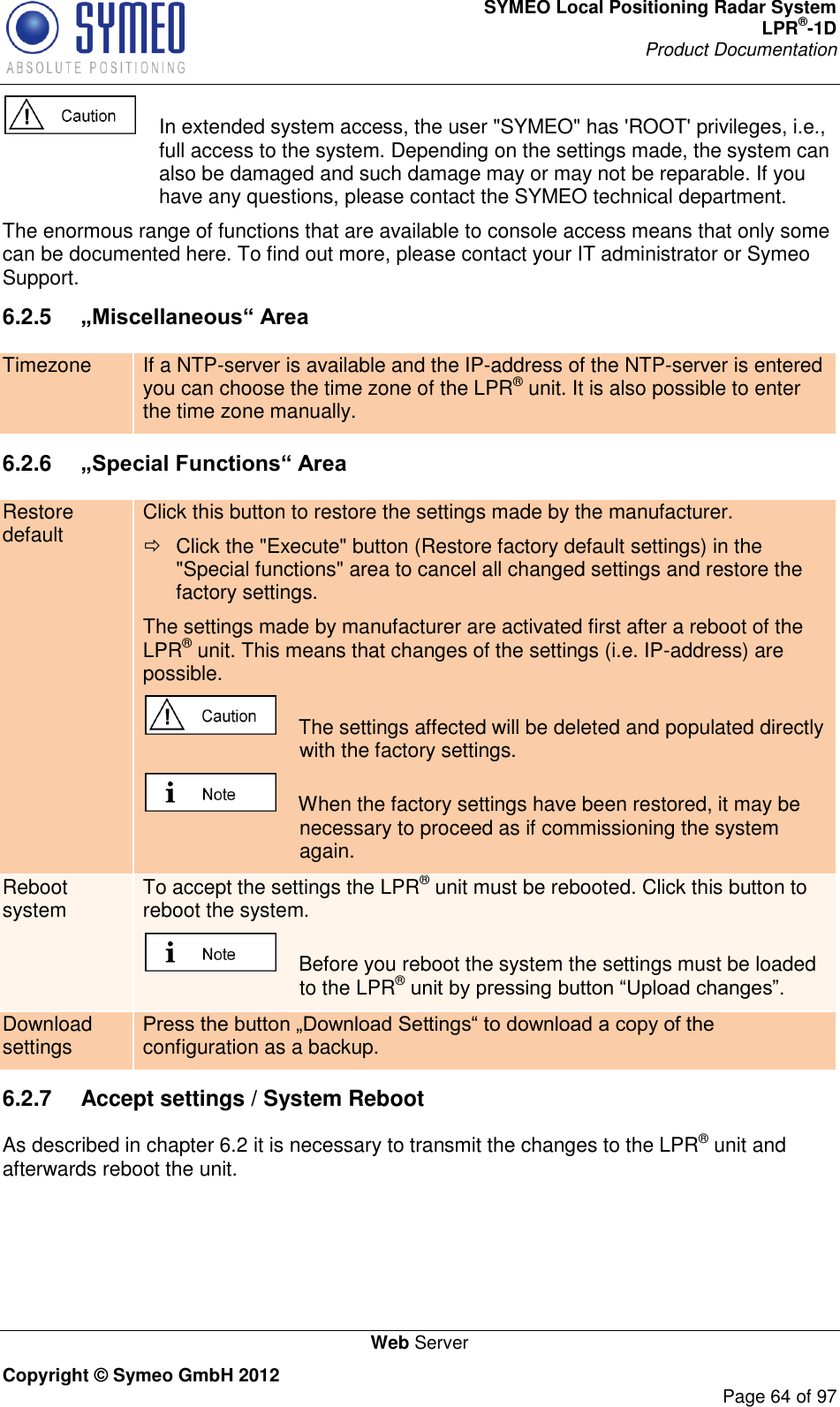
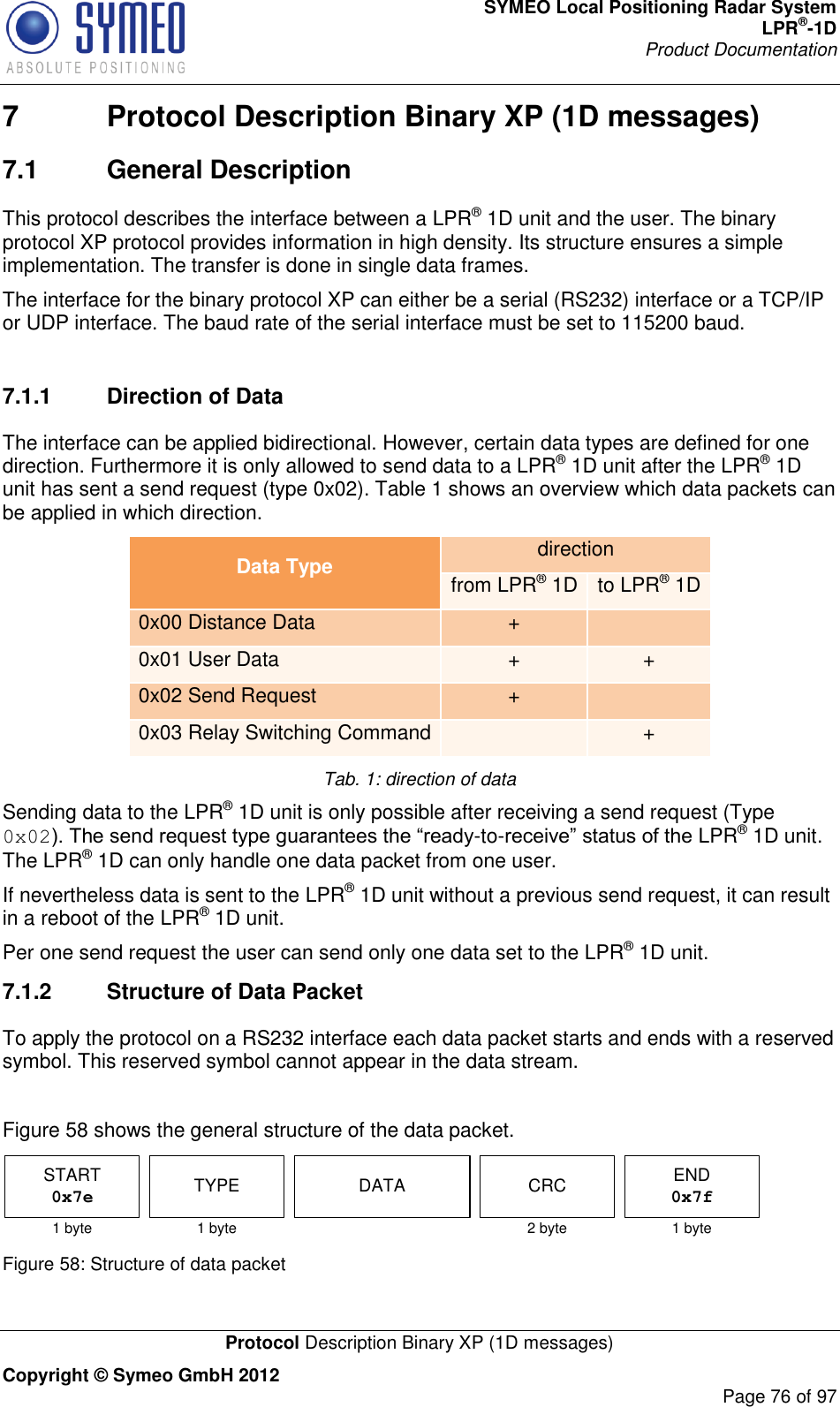
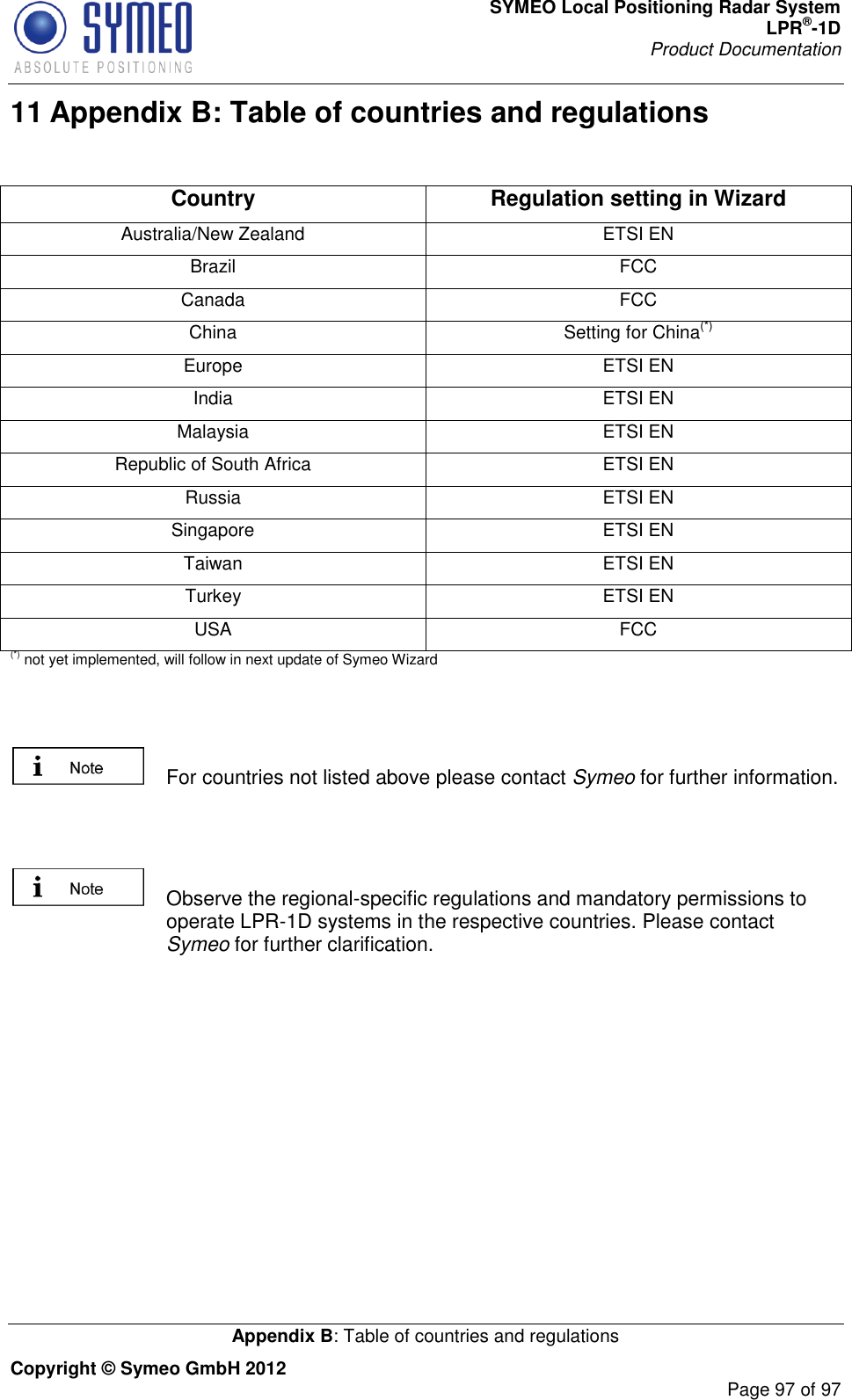
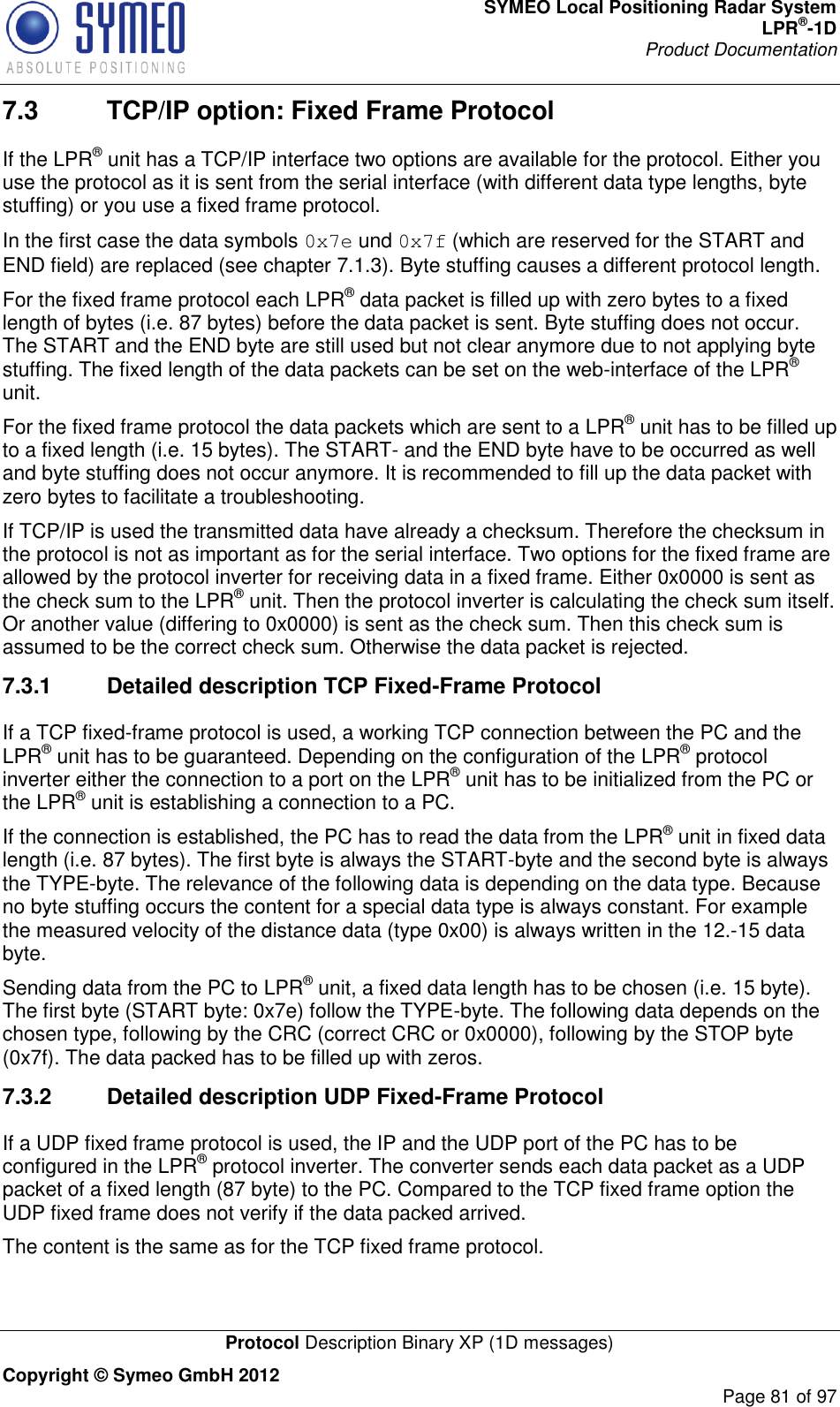
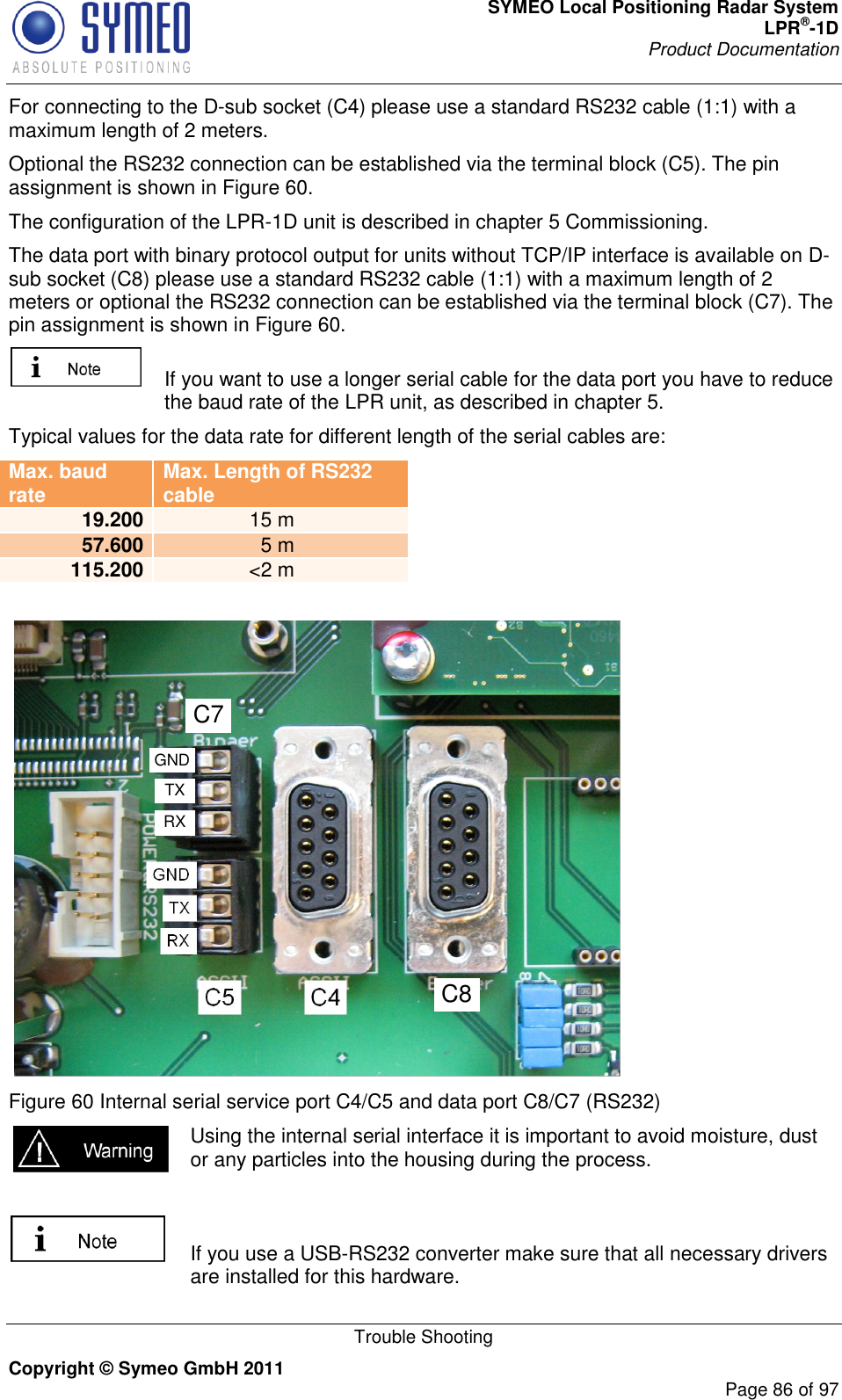
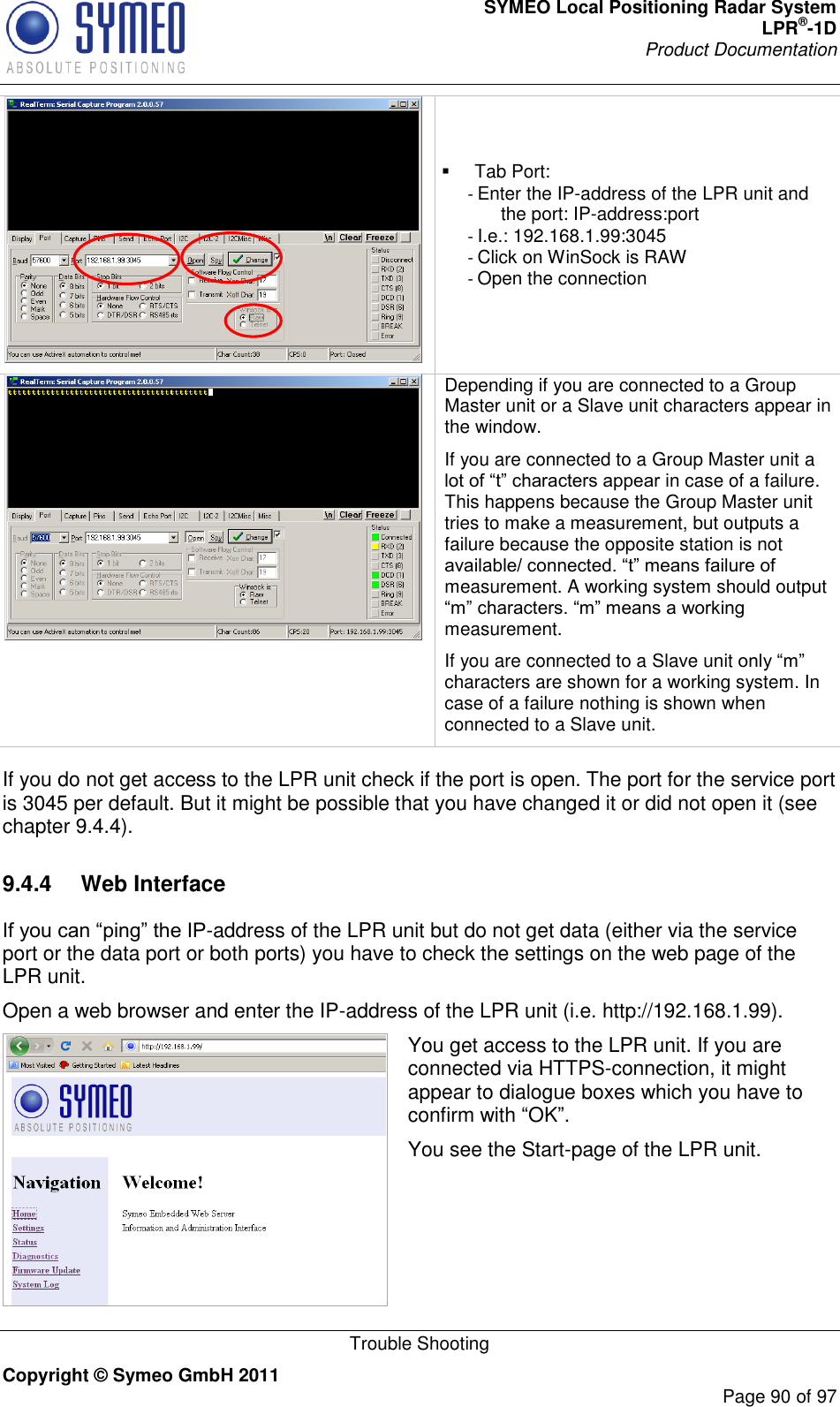
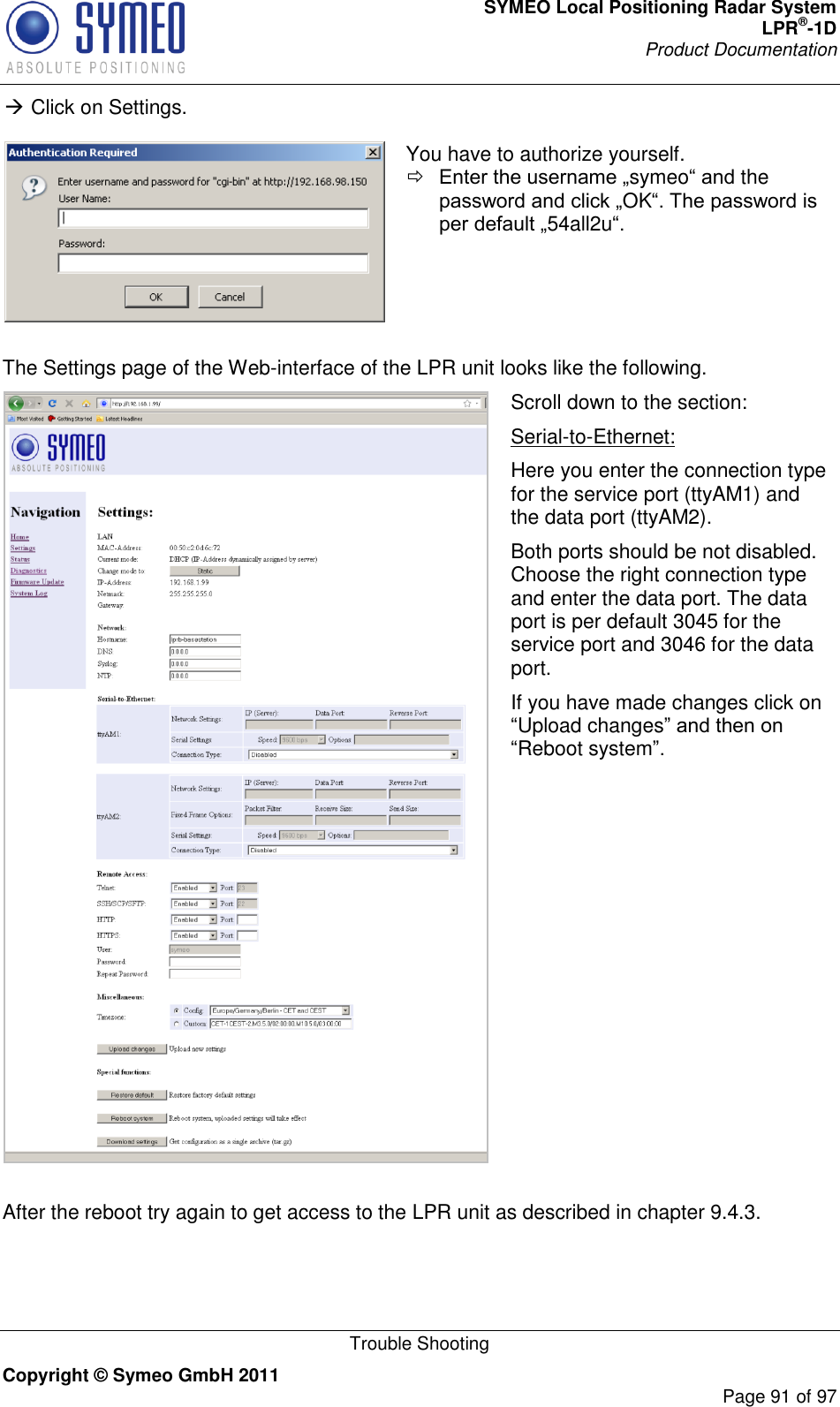
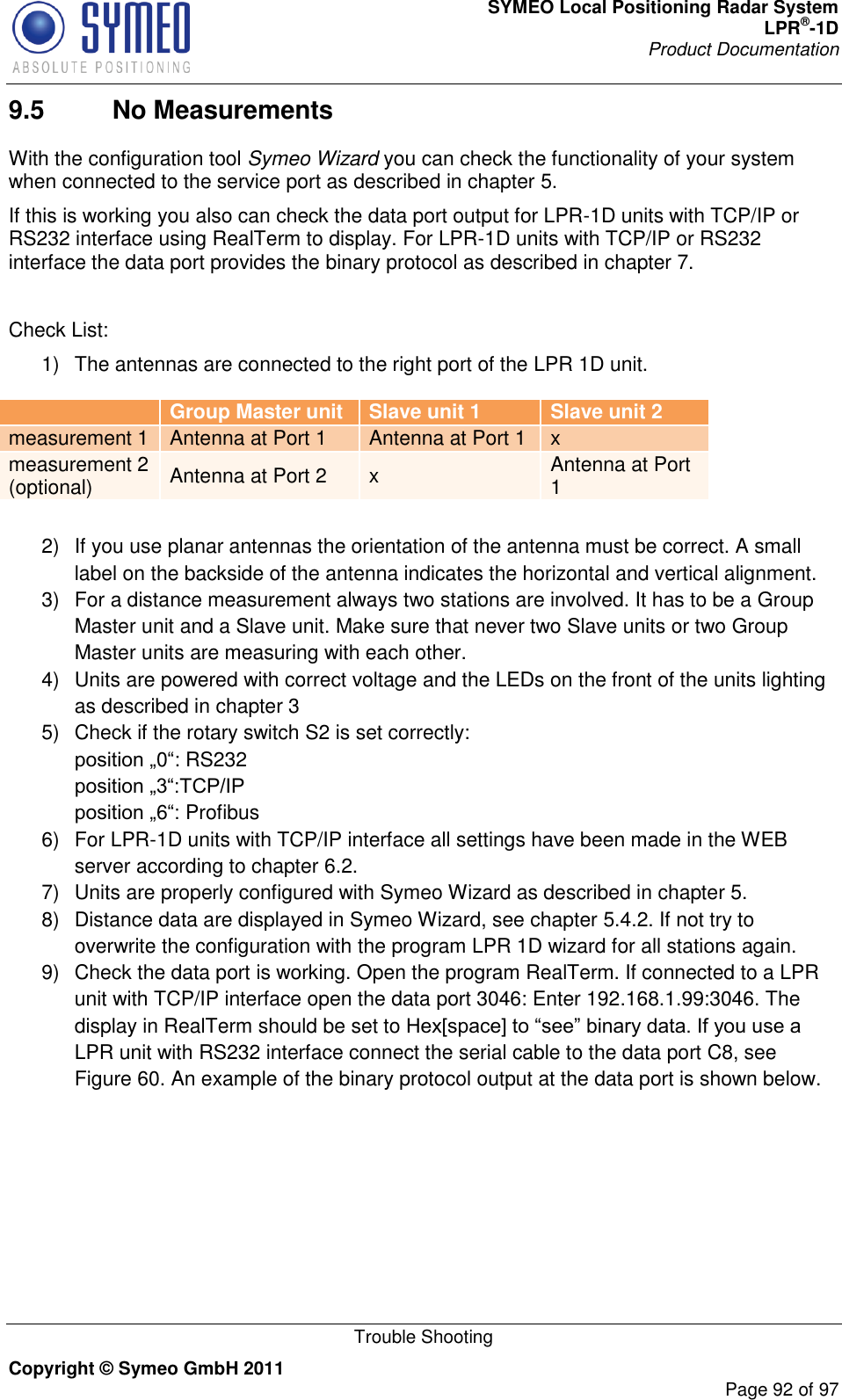
![SYMEO Local Positioning Radar System LPR®-1D Product Documentation Protocol Description Binary XP (1D messages) Copyright © Symeo GmbH 2012 Page 78 of 97 7.2 Data Types The second byte in each data packet specifies the data type. 7.2.1 Type 0x00 – Distance Data Direction: LPR® 1D Content Length Data type Value START 1 unsigned integer 0x7E TYPE 1 unsigned integer 0x00 Source1 (LPR® address) 2 see chapter 7.4.1 0x#### Destination1 (LPR® address) 2 see chapter 7.4.1 0x#### Antenna number2 1 unsigned integer 0x## Distance [mm] 4 signed integer 0x#### #### Velocity [mm/s] 4 signed integer 0x#### #### Level [dB] 1 signed integer 0x## Distance Error 1 see chapter 7.4.2 0x## Status3 1 unsigned integer 0x00 CRC 2 unsigned integer 0x#### END 1 unsigned integer 0x7F Total length without byte stuffing: 21 byte 1) Any measurement is always executed by a LPR® 1D Slave Unit, this means, the Slave Unit measures its distance etc. towards a Group Master Unit. The source field always contains the address of the LPR® 1D Slave Unit. The destination field contains the address of the measured Group Master Unit. Even if the data set is transferred further on to another unit (e.g. another Group Master Unit), the value of the source and destination field is maintained. 2) The field antenna contains the antenna number of the Slave Unit as well as the antenna number of the measured Group Master Unit. The 4 lower bits represent the antenna number of the Slave Unit Group Master Unit 3) reserved for future application. Currently set to 0. Example of Distance Data 7E 02 C1 81 7F 7E 00 10 03 08 02 11 00 00 10 62 00 00 00 7A E6 00 00 AF C4 7F Figure 59 - Protocol for a single 1D measurement: request data and following distance data This protocol shows a simple example for 1D measurement. A distance data set (or also 2 distance data sets) alternate with a send request. The Send Request indicates that the LPR® unit is listening to a data set from the user (for example relays external commands). The Distance Data sends the data to the user (i.e. to a PLC or to a PC/software).](https://usermanual.wiki/Symeo/PLB000998/User-Guide-1702387-Page-78.png)
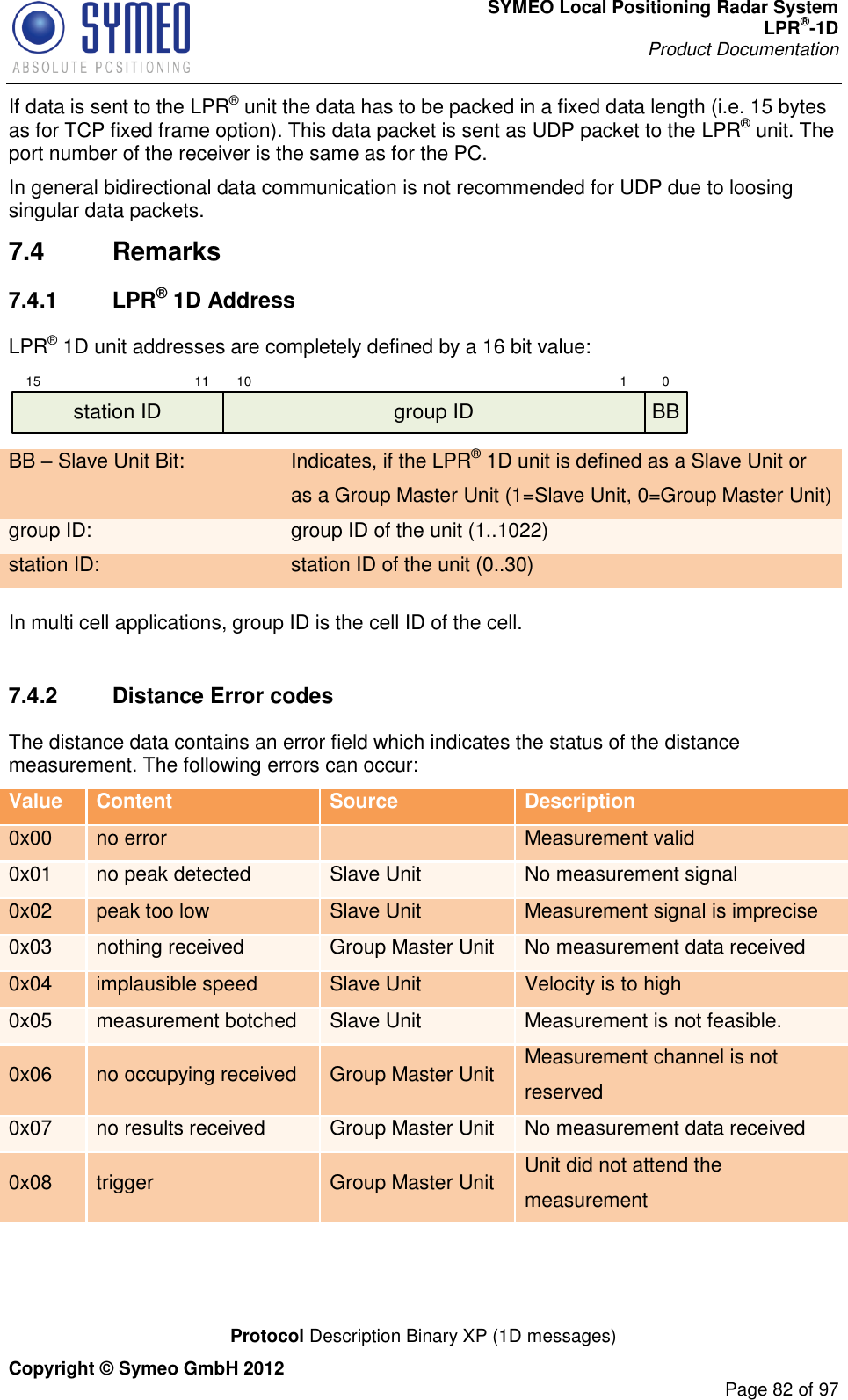
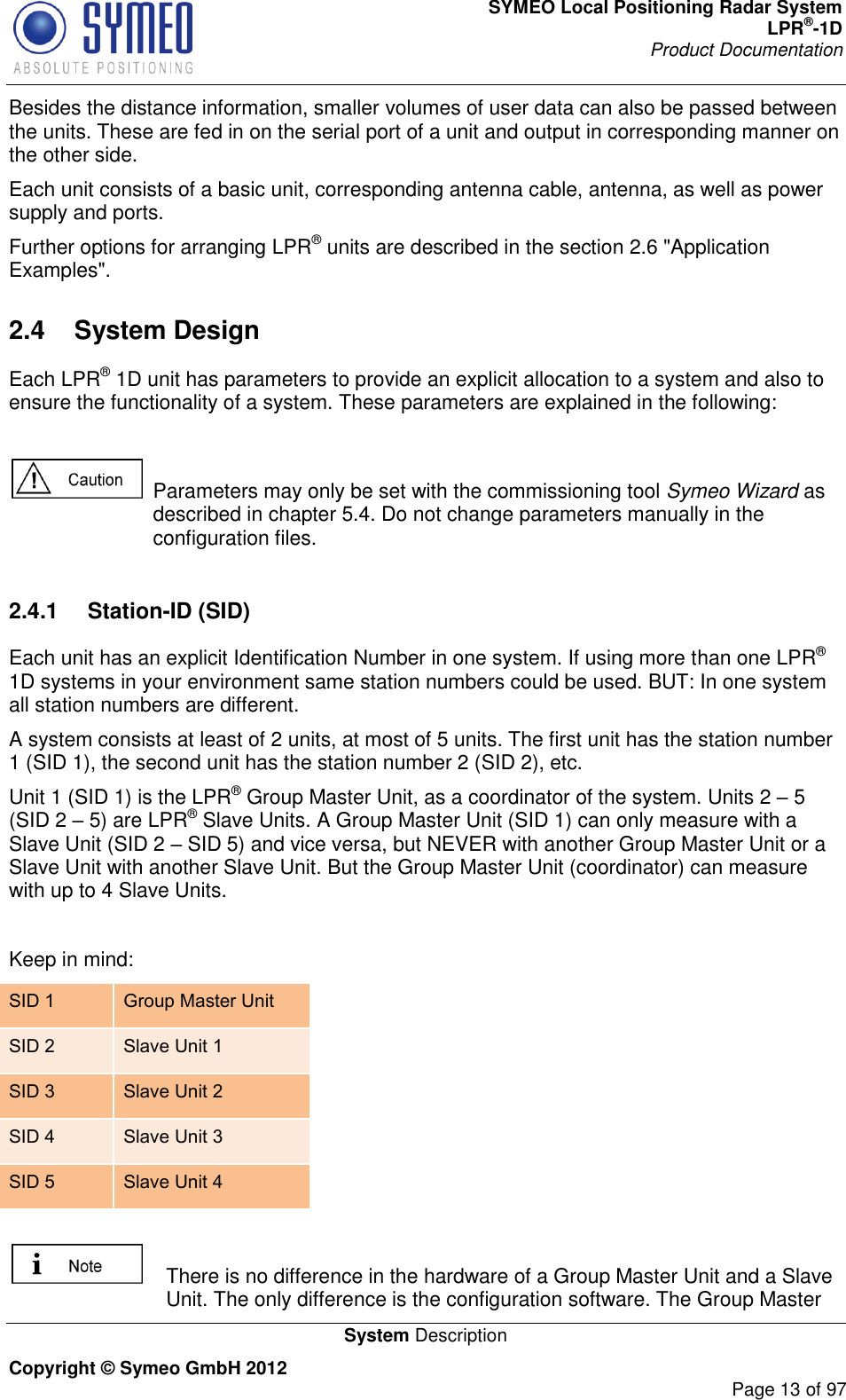
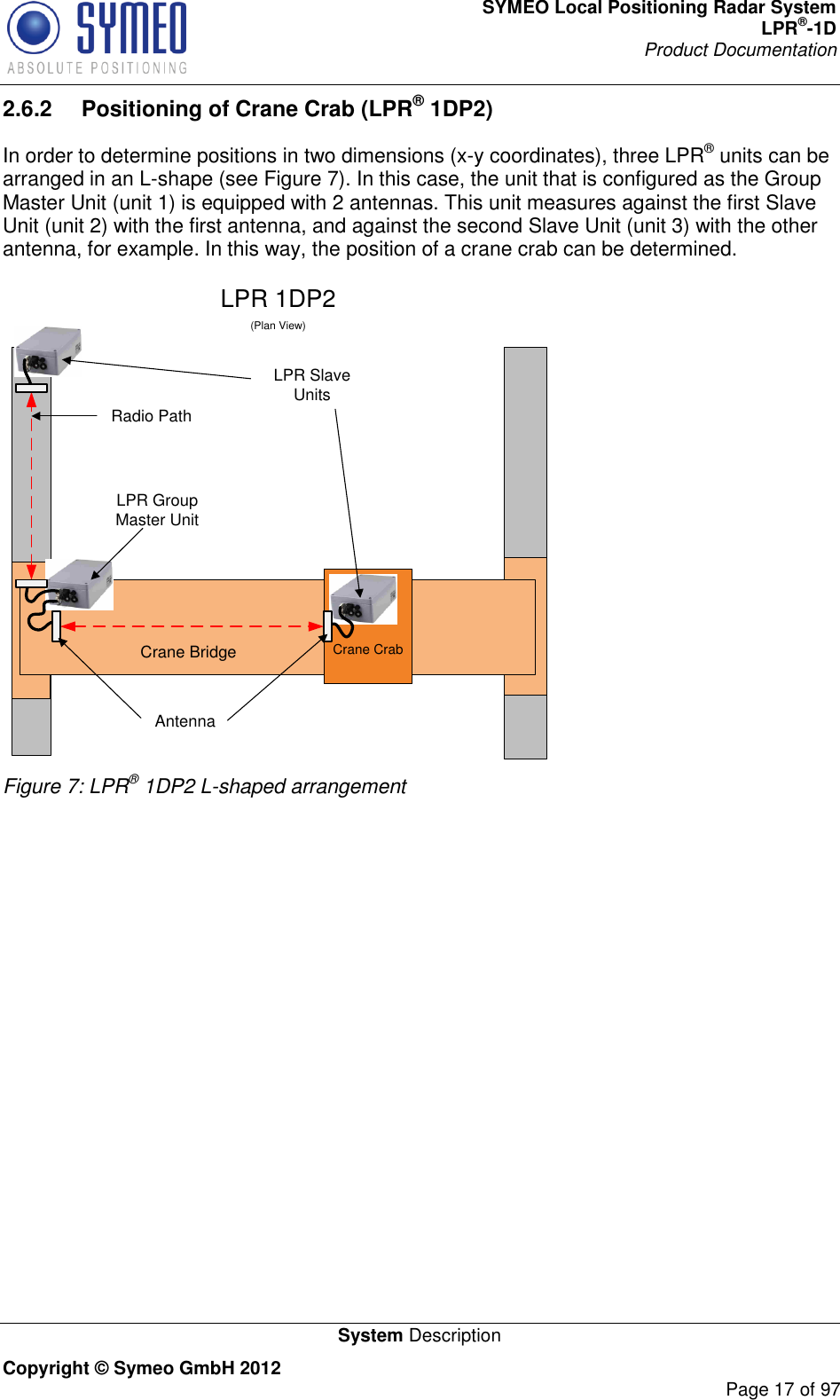
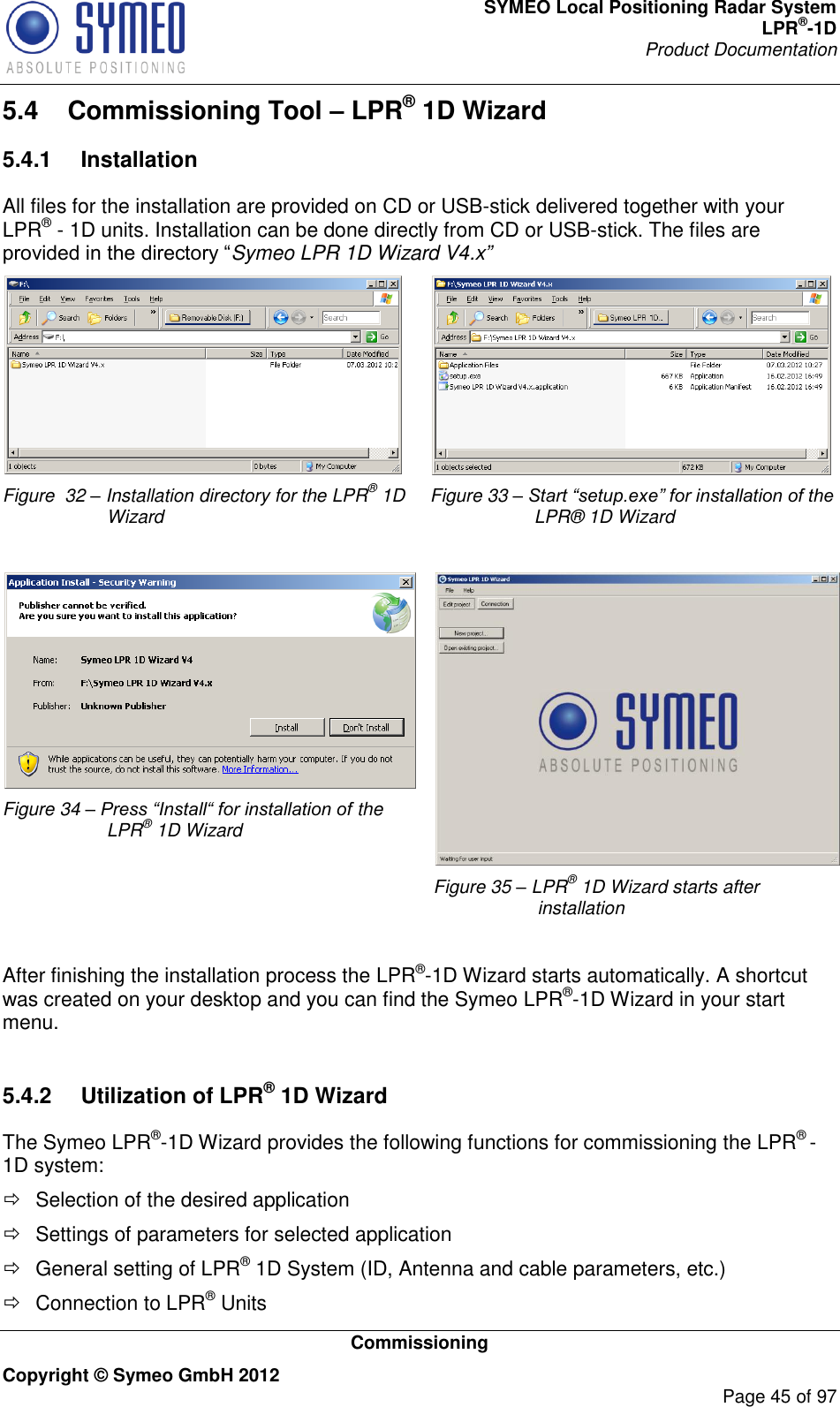
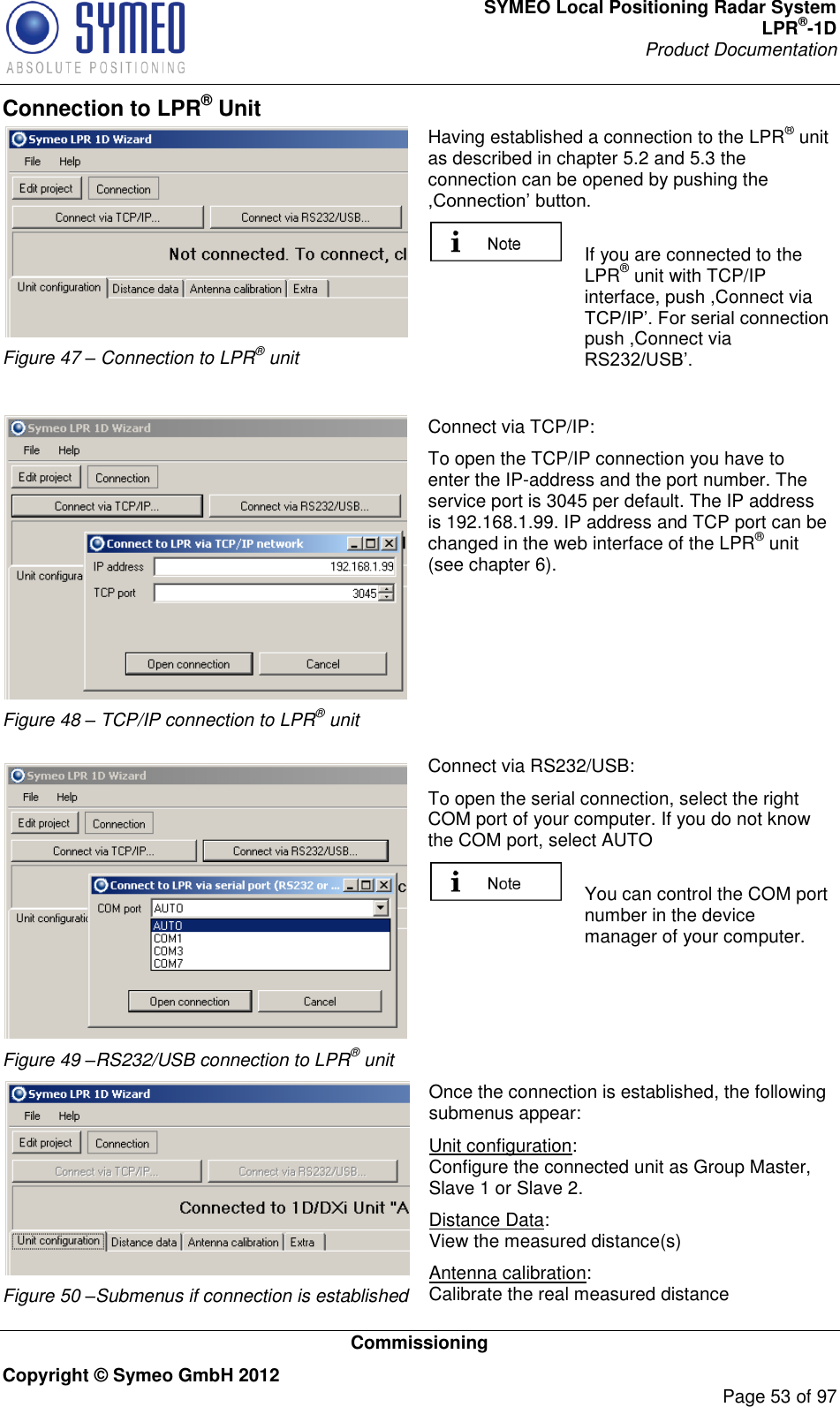
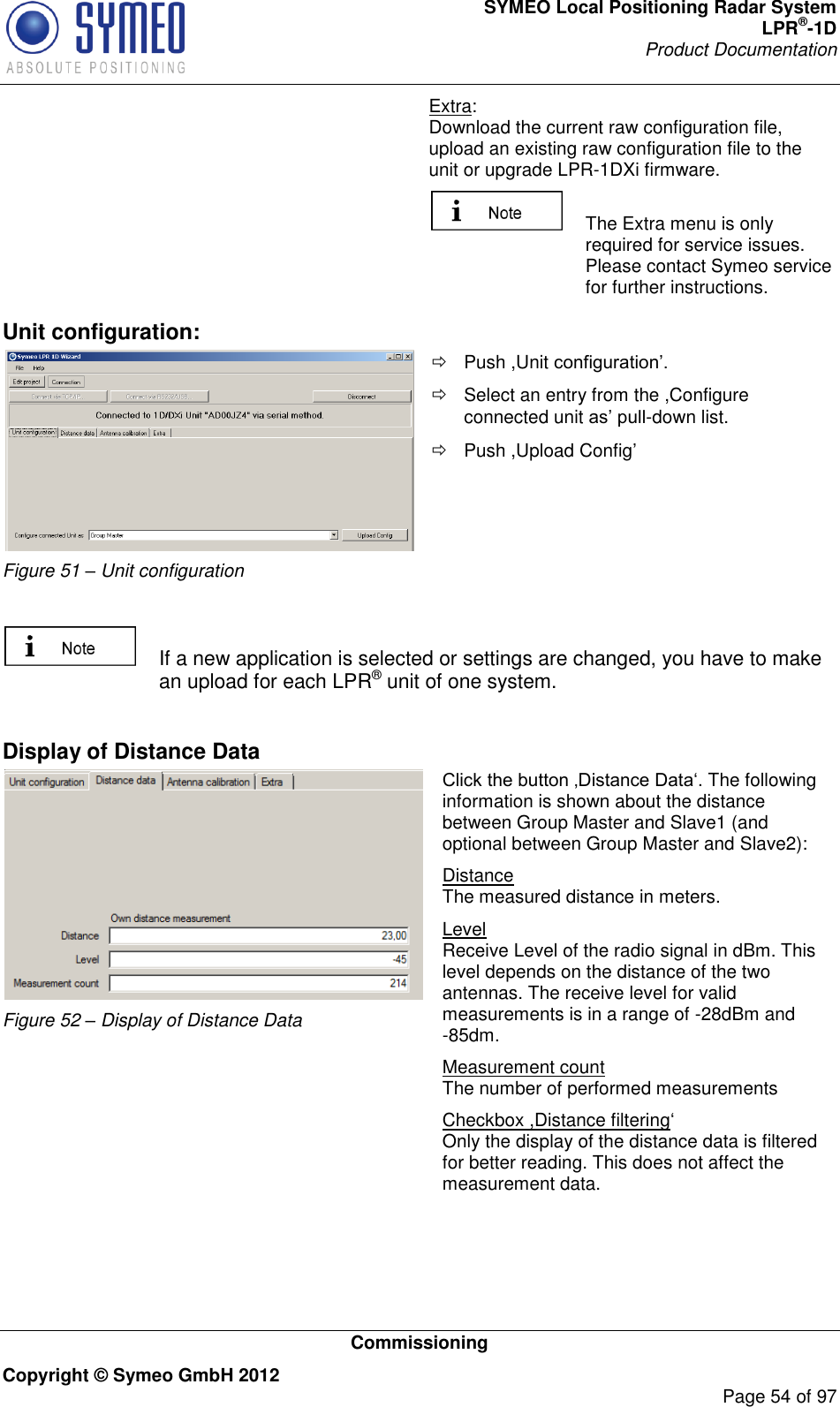
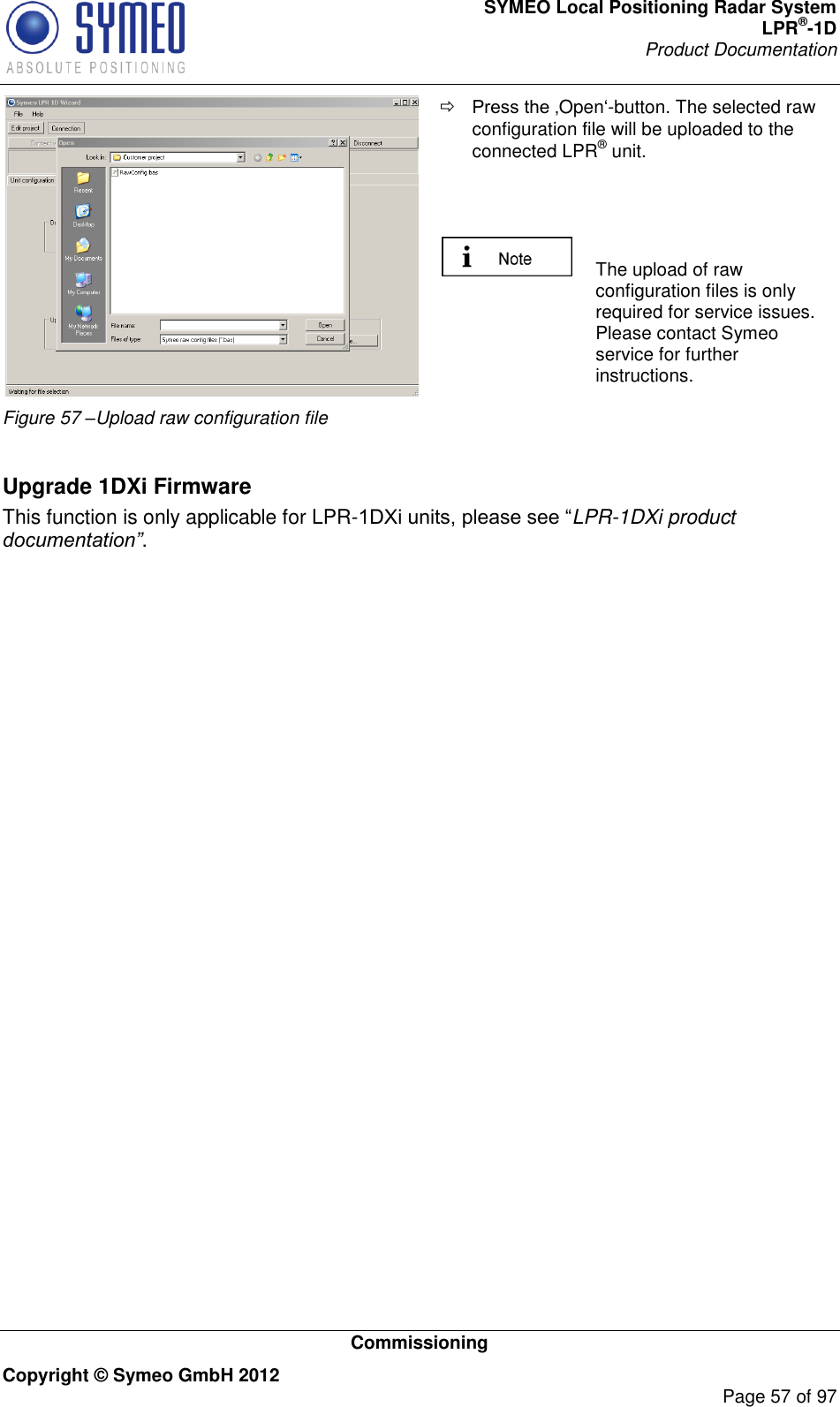
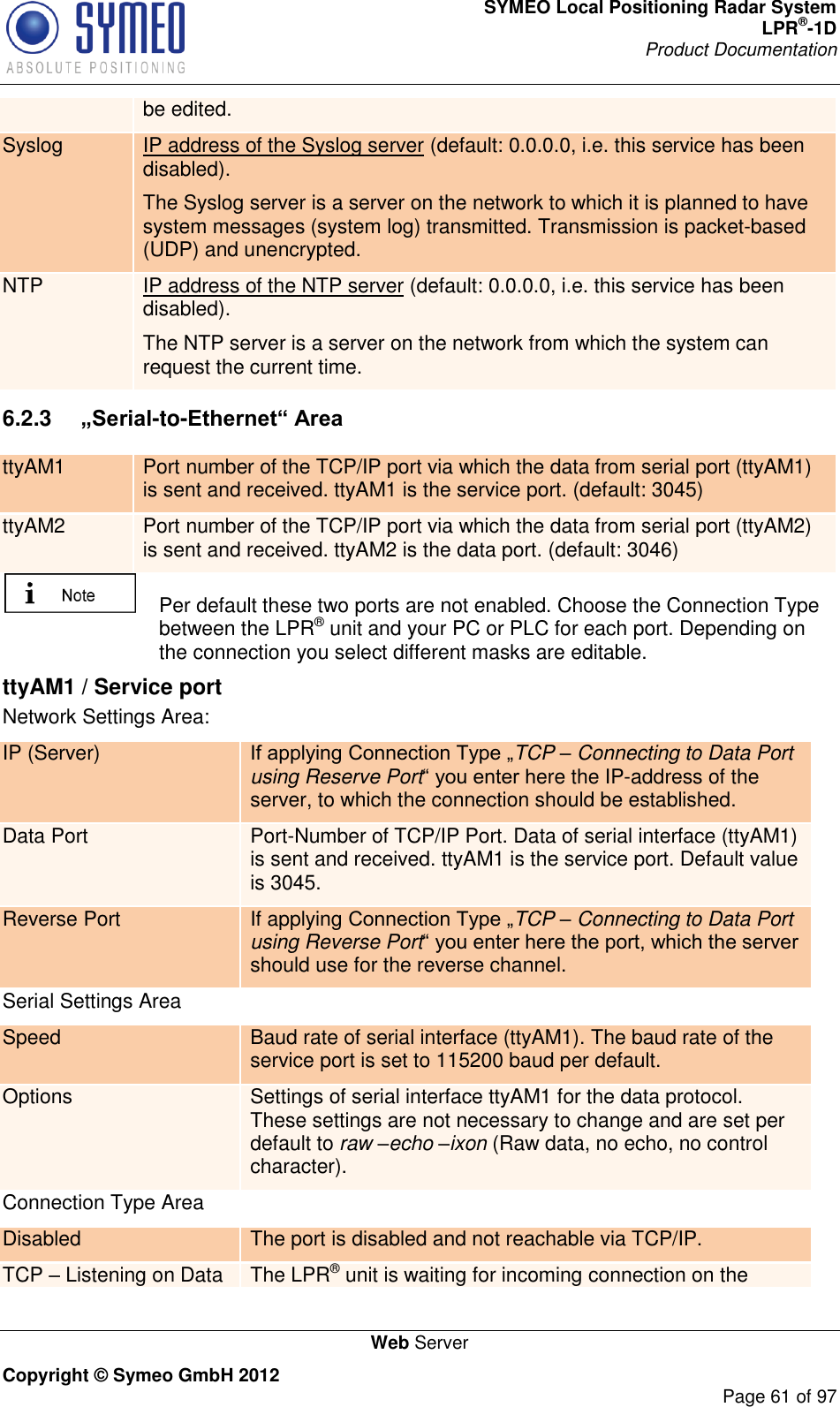
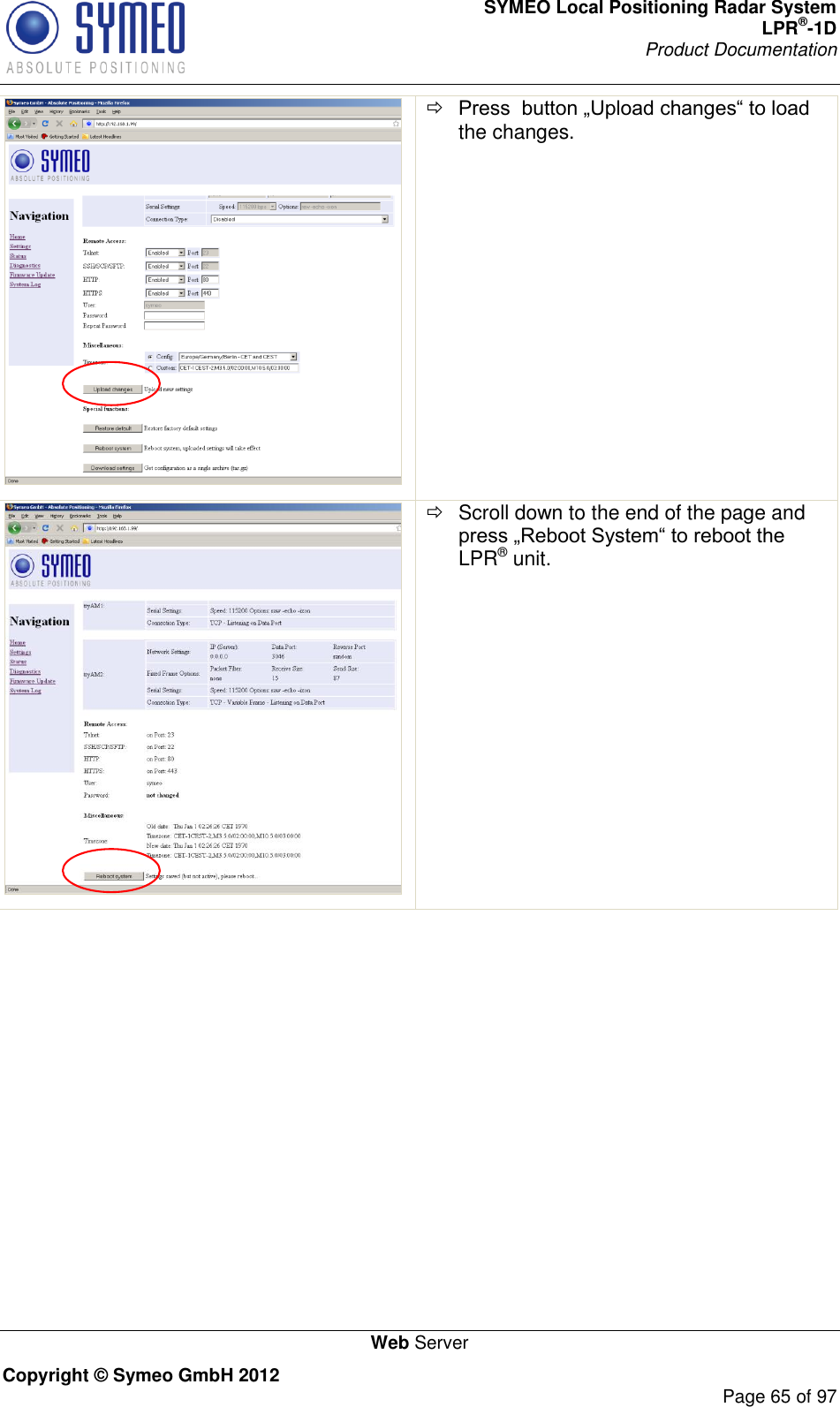
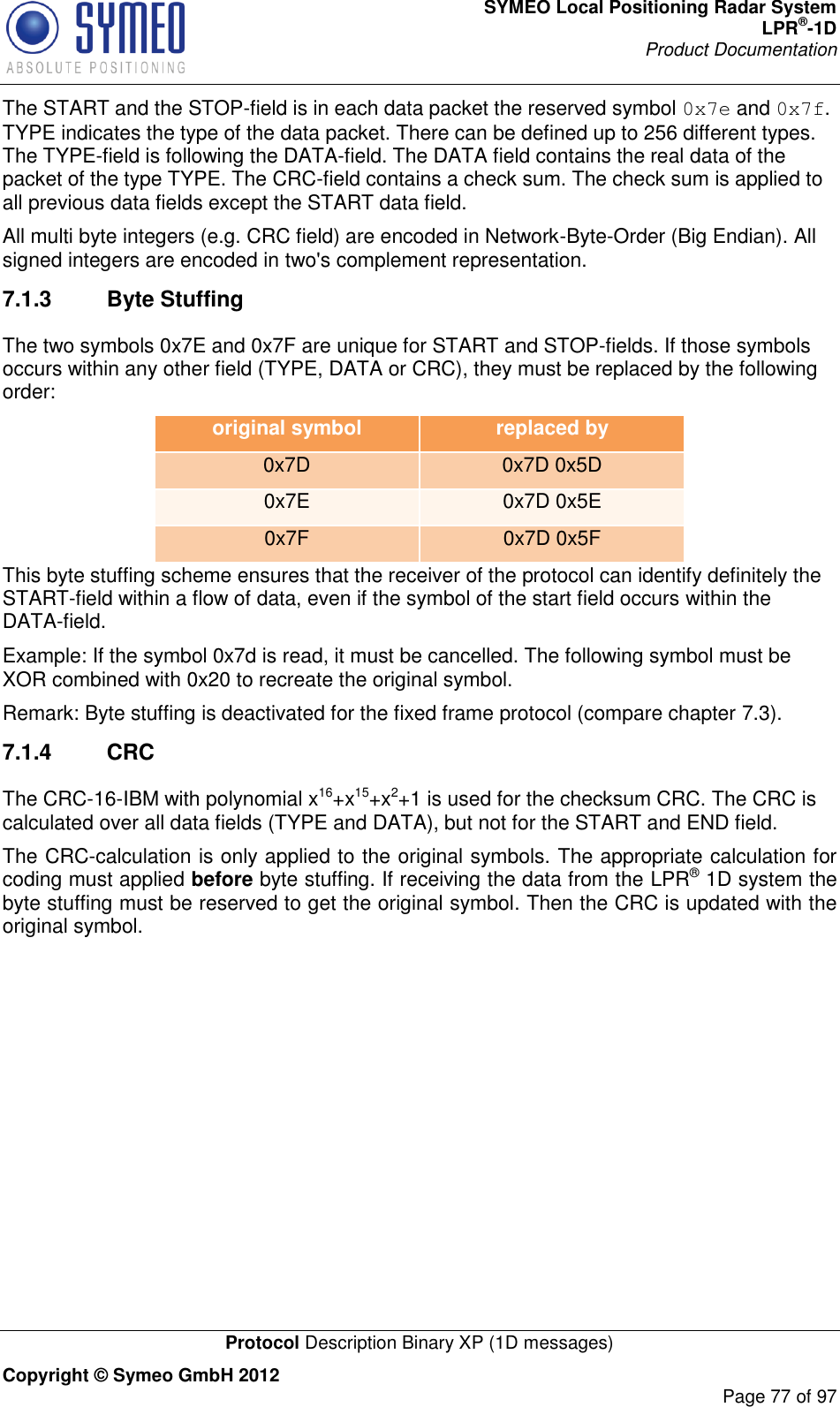
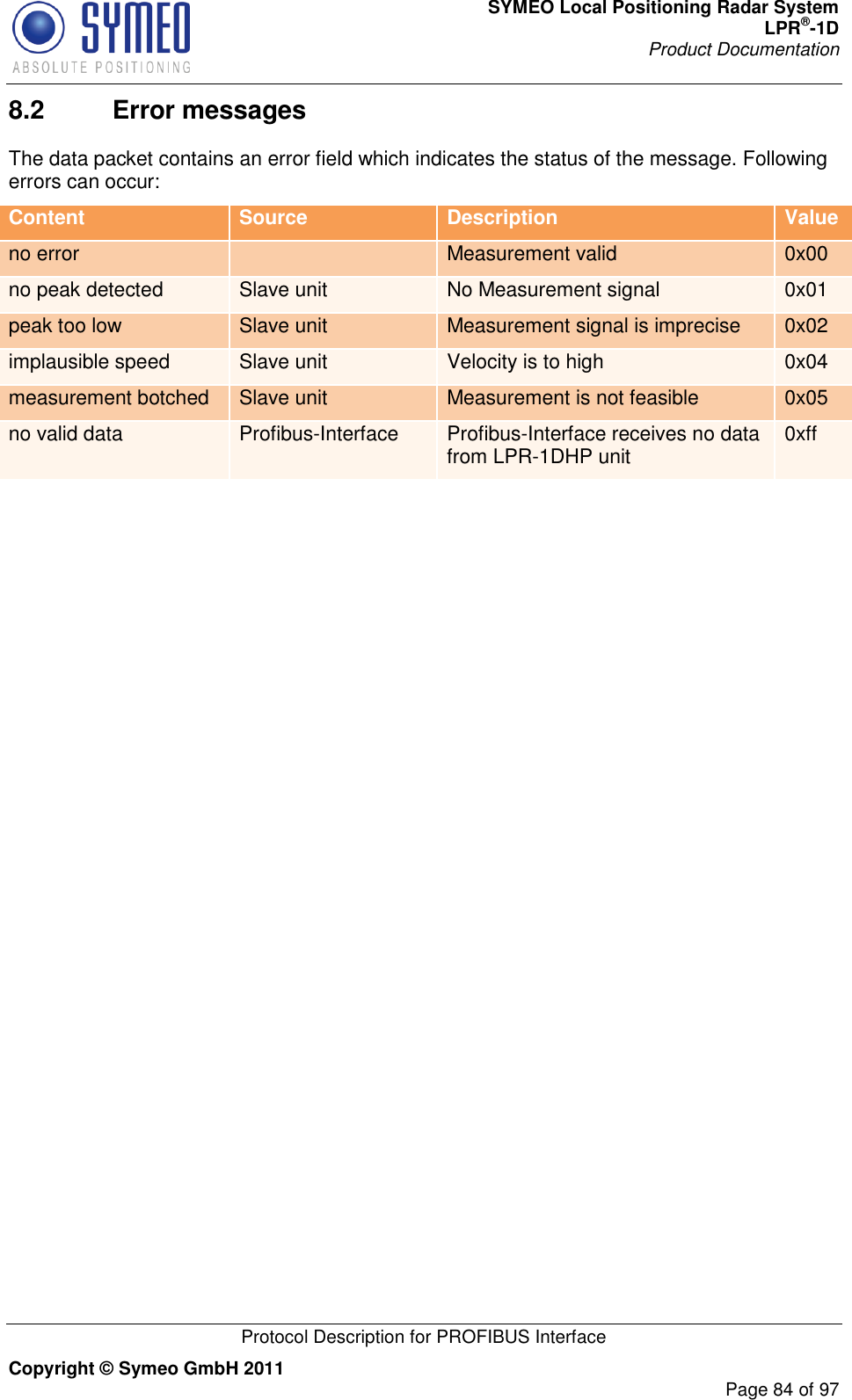
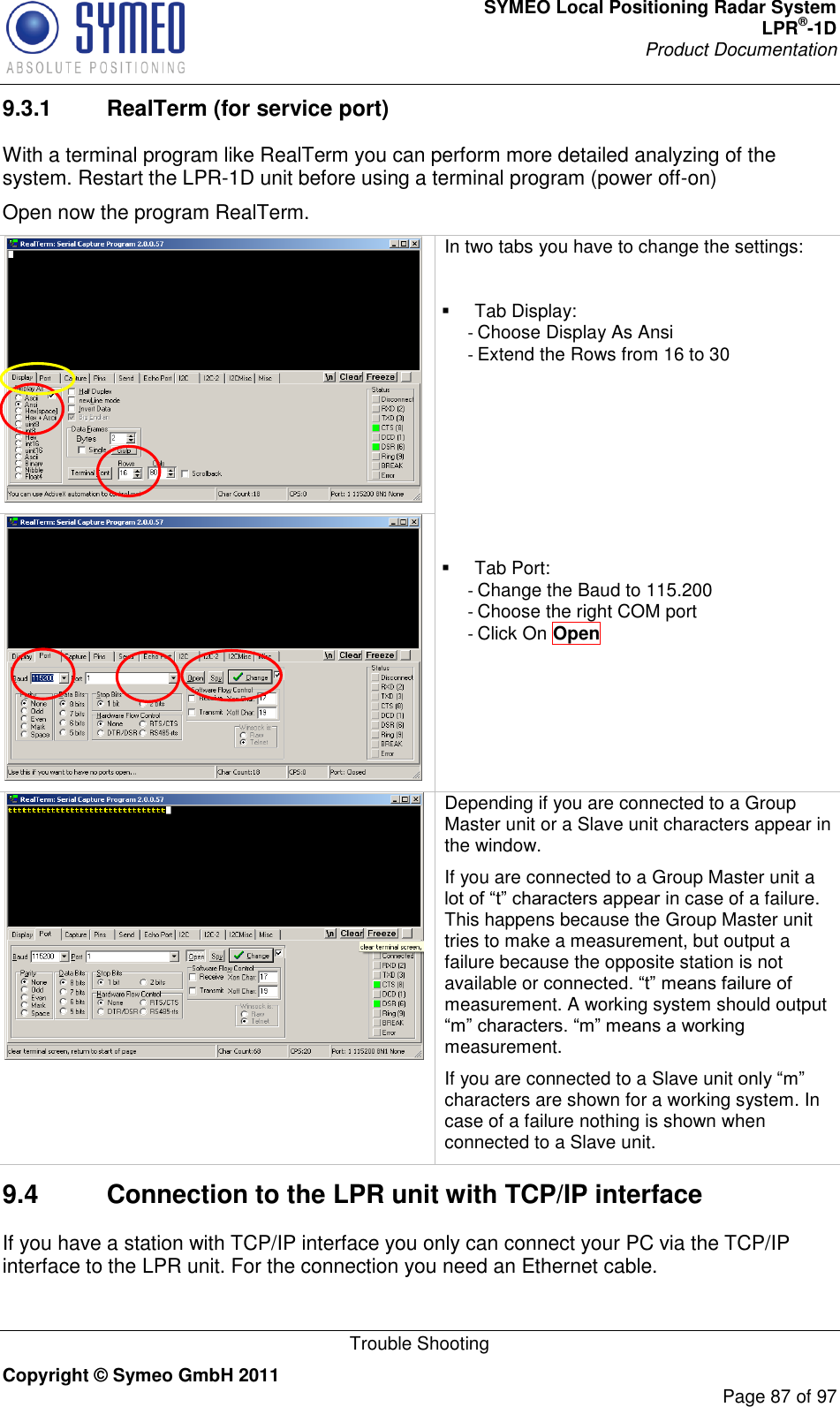
![SYMEO Local Positioning Radar System LPR®-1D Product Documentation Protocol Description for PROFIBUS Interface Copyright © Symeo GmbH 2012 Page 83 of 97 8 Protocol Description for PROFIBUS Interface 8.1 Profibus data structure The total length of one data set is 48 bytes. The first 24 bytes presents the data for the slave unit 1 with station ID 2, the second 24 bytes presents the data for the slave unit 2 with station ID 3. Content Length Value Content Station ID Distance [mm] 4 0x#### #### signed integer 2 Velocity [mm/s] 3) 4 0x#### #### signed integer 2 Level [dB] 1 0x## signed integer 2 Error (siehe Kapitel 8.2) 1 0x## unsigned integer 2 Status 1 0x00 unsigned integer 2 not used 1 0x## unsigned integer 2 Update counter distance1) 2 0x#### unsigned integer 2 Update counter user data2) 2 0x#### unsigned integer 2 User data 8 2 Distance [mm] 4 0x#### #### signed integer 3 Velocity [mm/s] 3) 4 0x#### #### signed integer 3 Level [dB] 1 0x## signed integer 3 Error (siehe Kapitel 8.2) 1 0x## unsigned integer 3 Status 1 0x00 unsigned integer 3 not used 1 0x## unsigned integer 3 Update counter distance1) 2 0x#### unsigned integer 3 Update counter user data2) 2 0x#### unsigned integer 3 User data 8 3 1) This counter is incremented when the Profibus-interface receives new data from the LPR®-1D unit. In error-free operation this value is not steady. 2) This counter is incremented when the Profibus-interface receives new user data from the LPR®-1D unit. 3) The values for velocity are raw data. Velocity data are not smoothed and should only be used with following filtering.](https://usermanual.wiki/Symeo/PLB000998/User-Guide-1702387-Page-83.png)
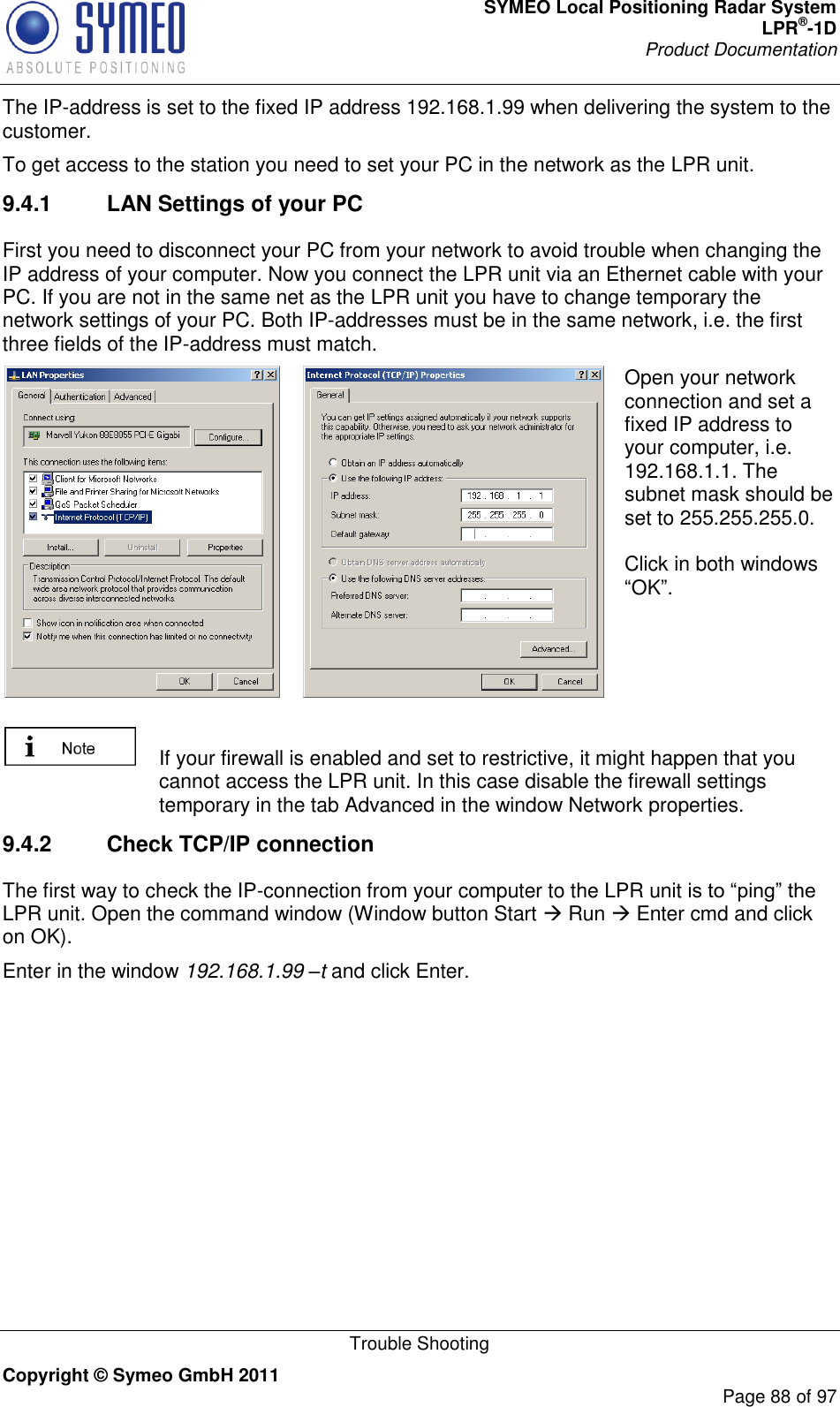

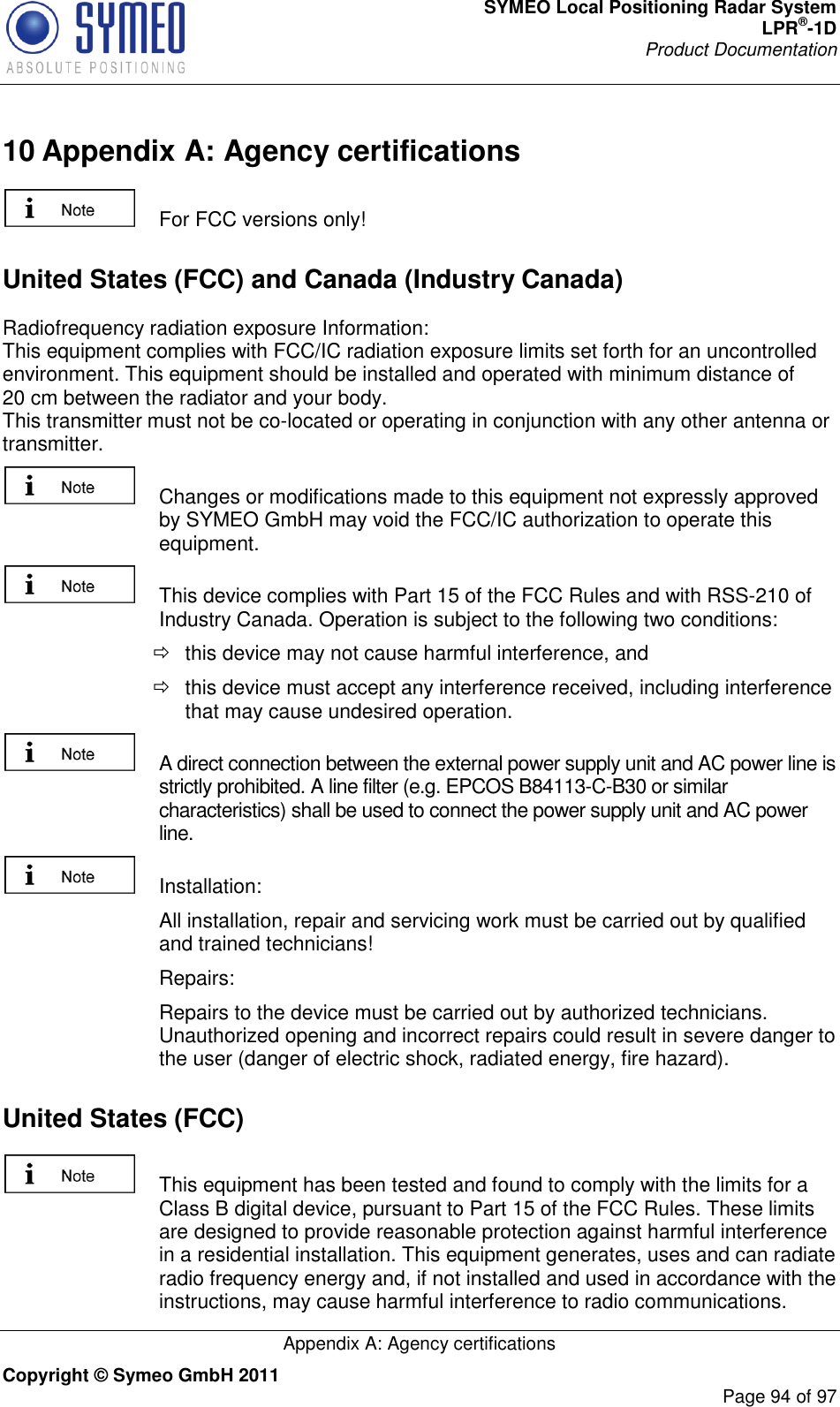
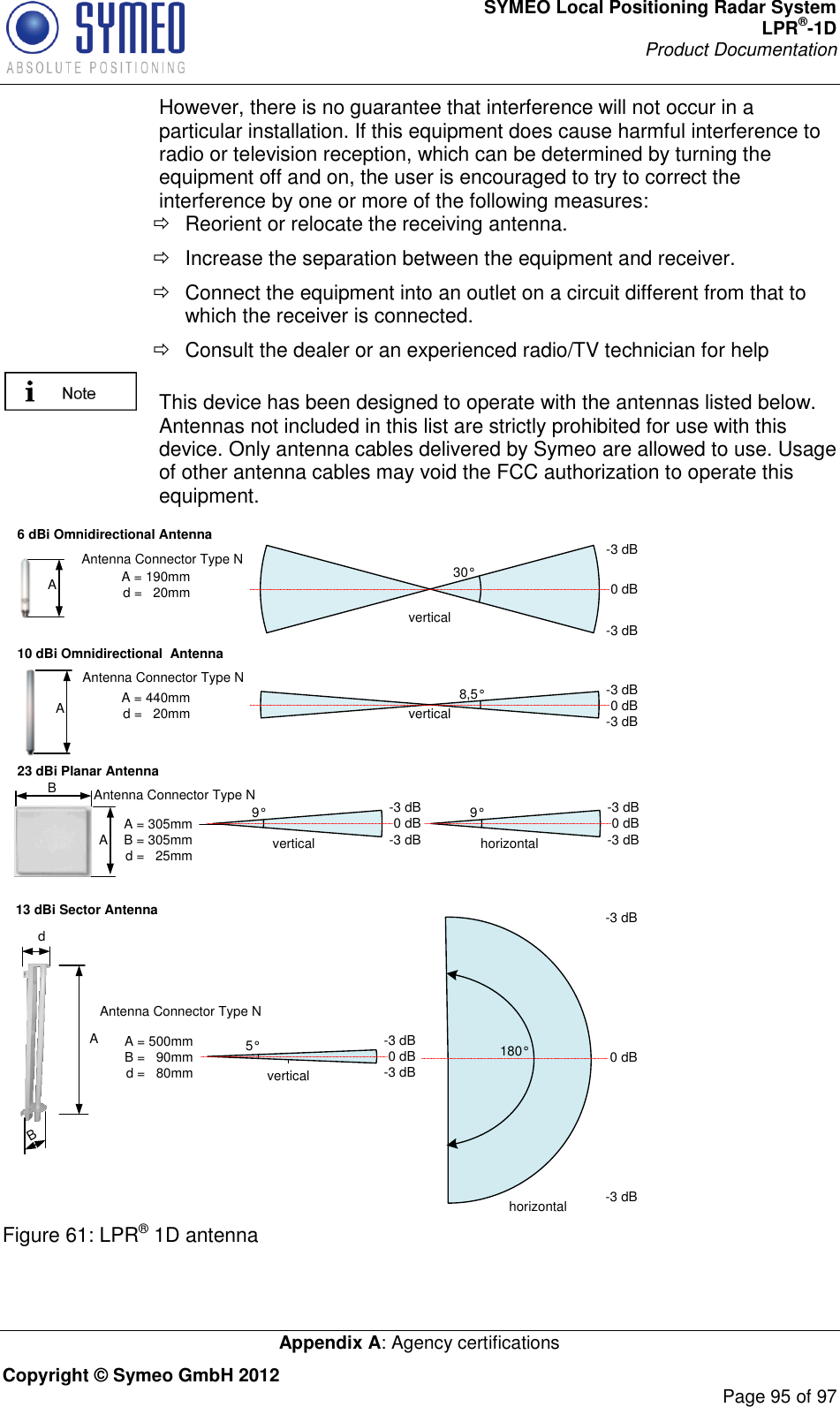
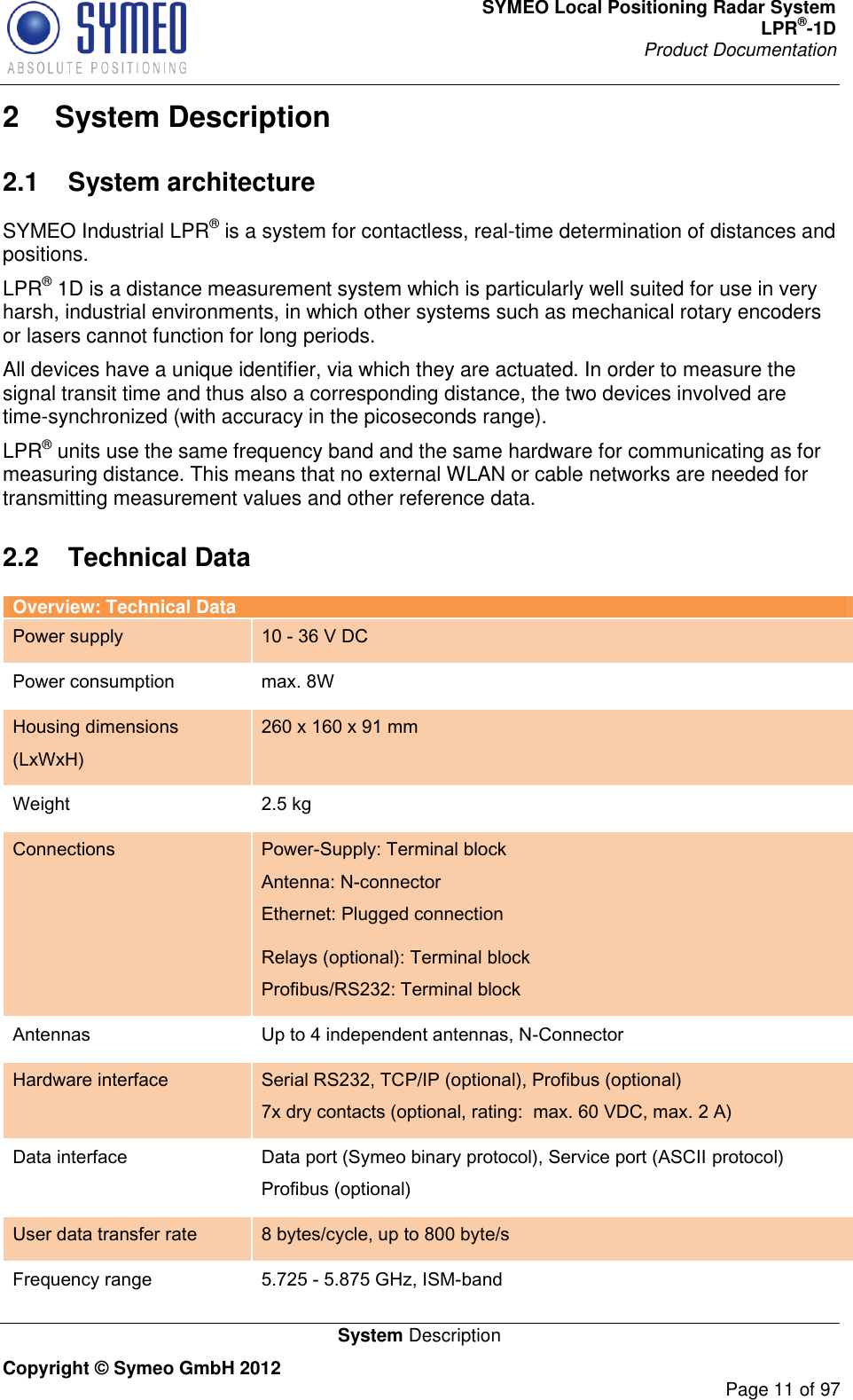
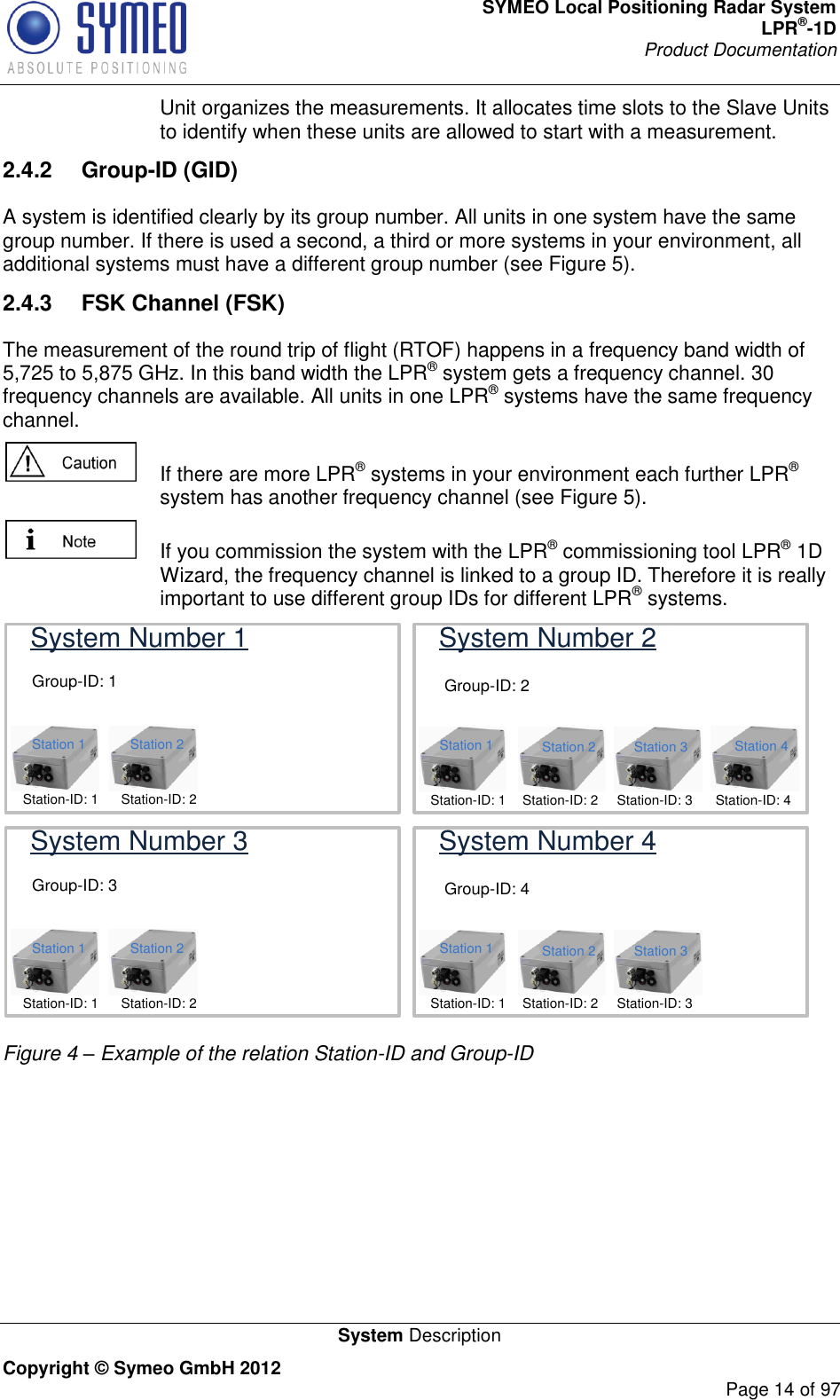
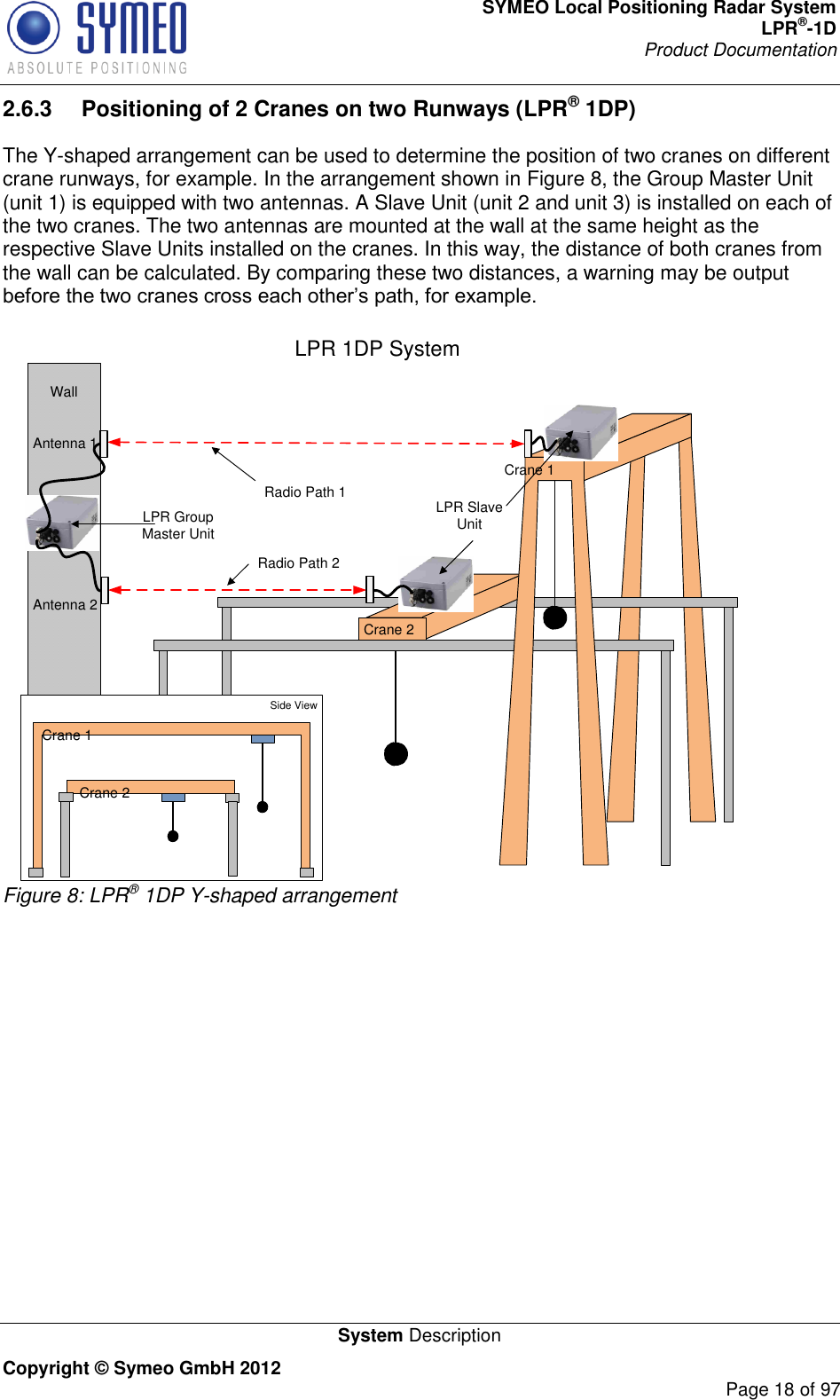
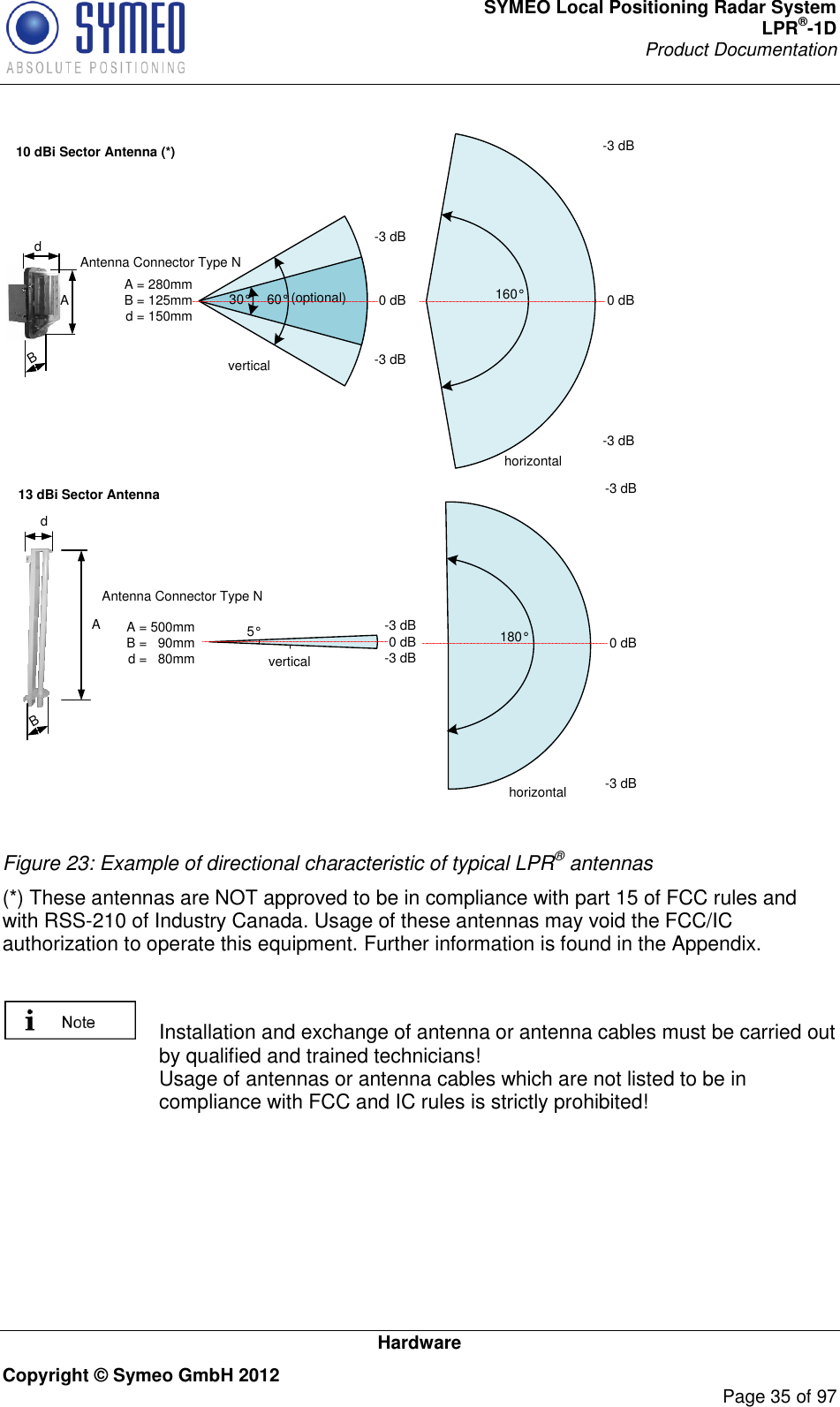
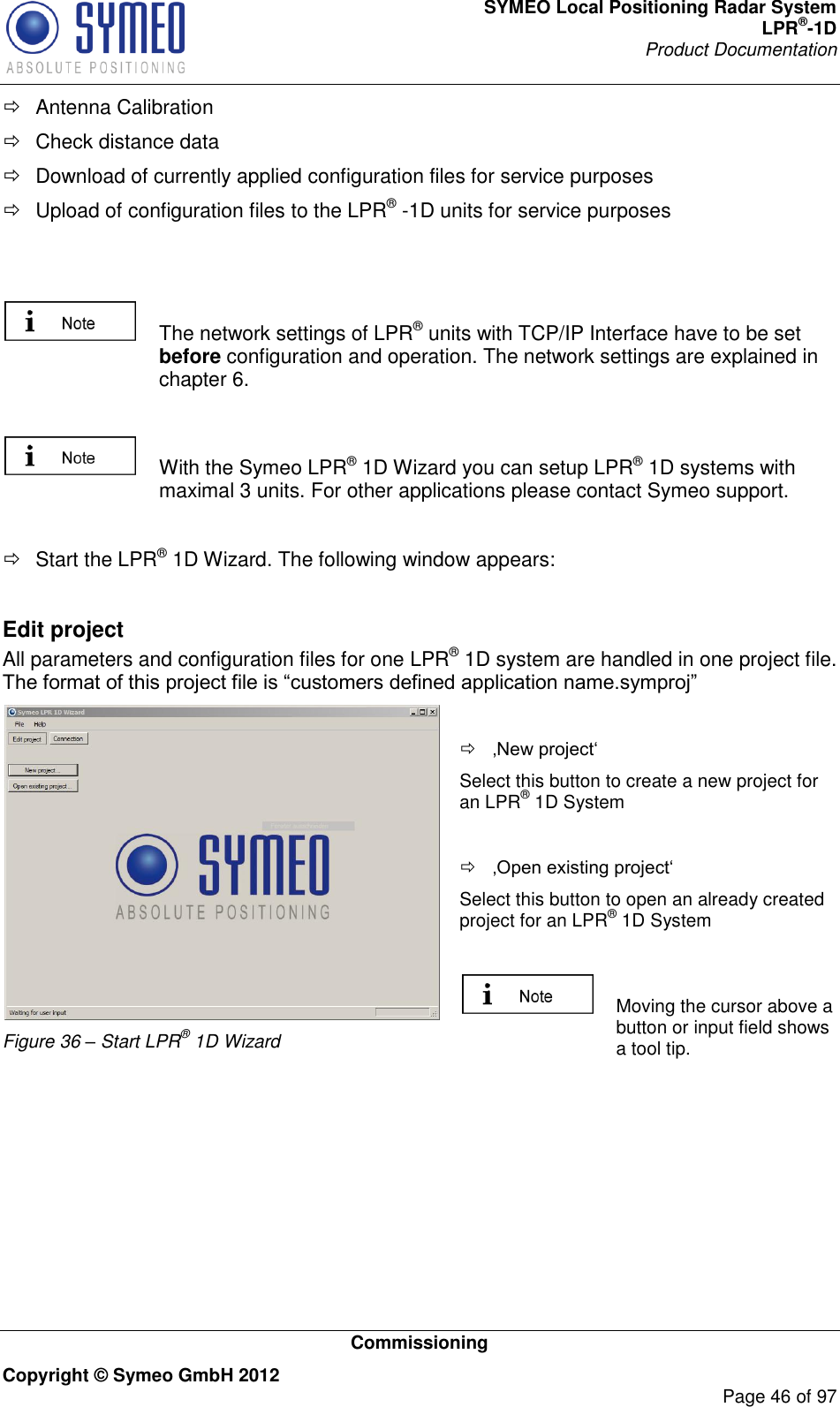
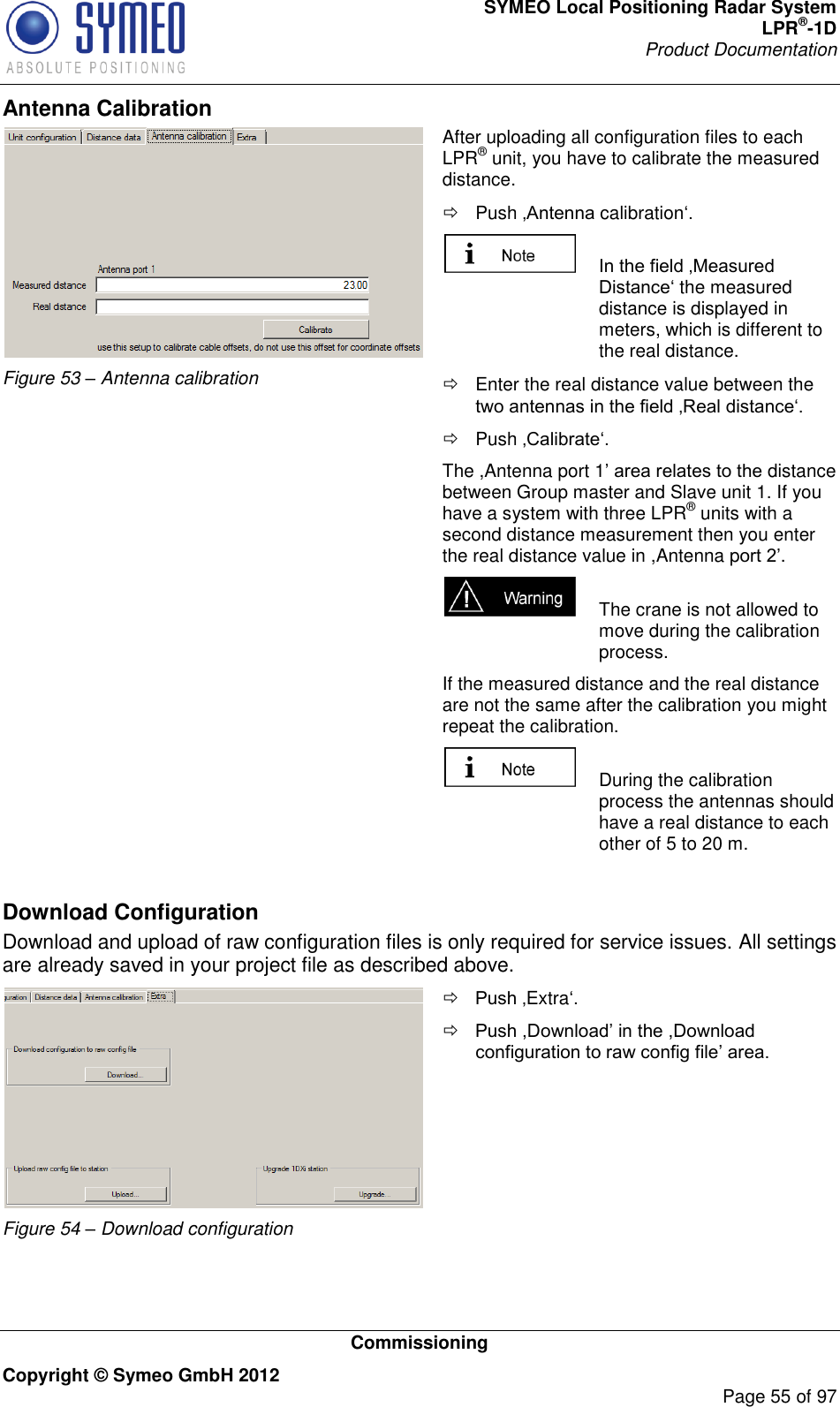
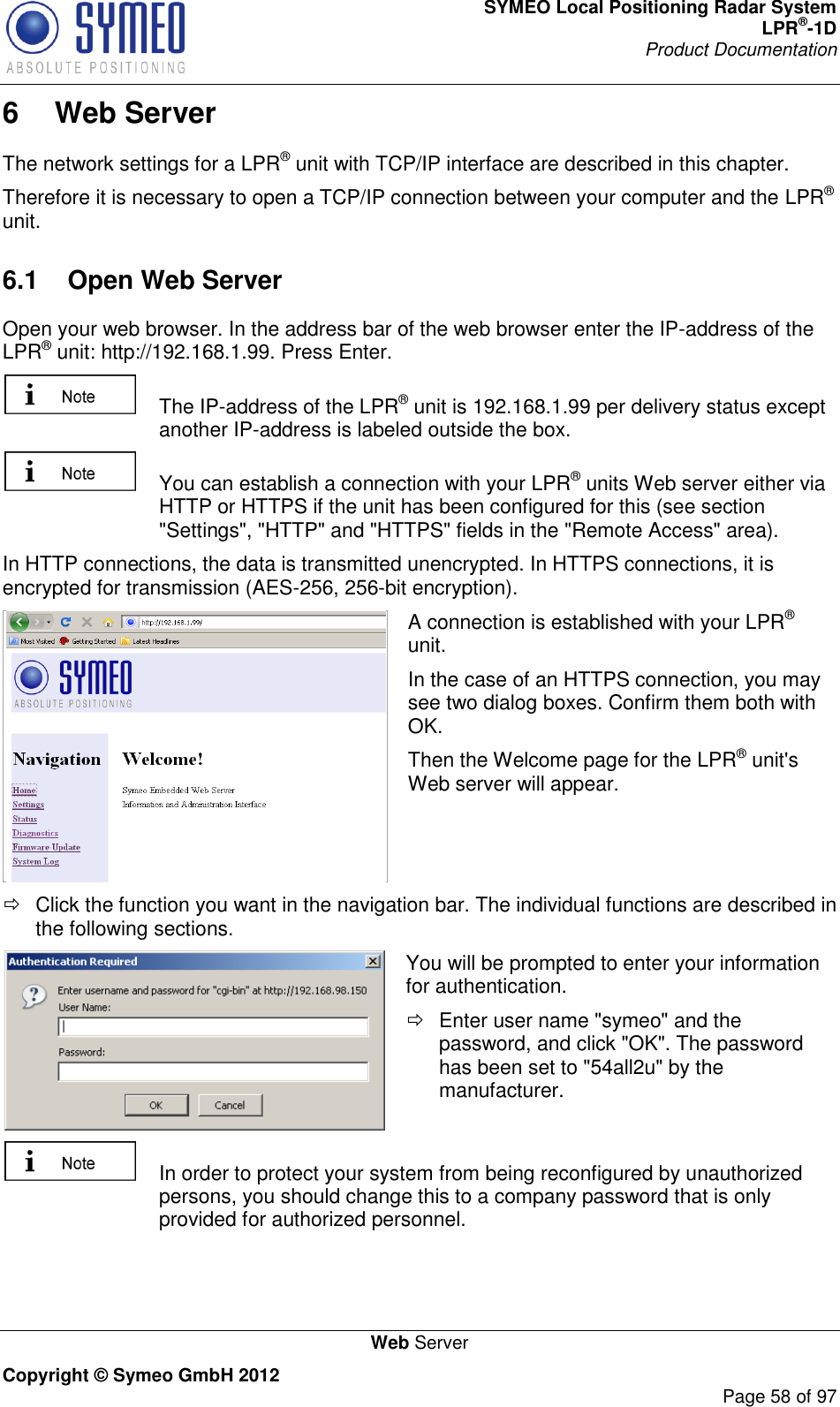
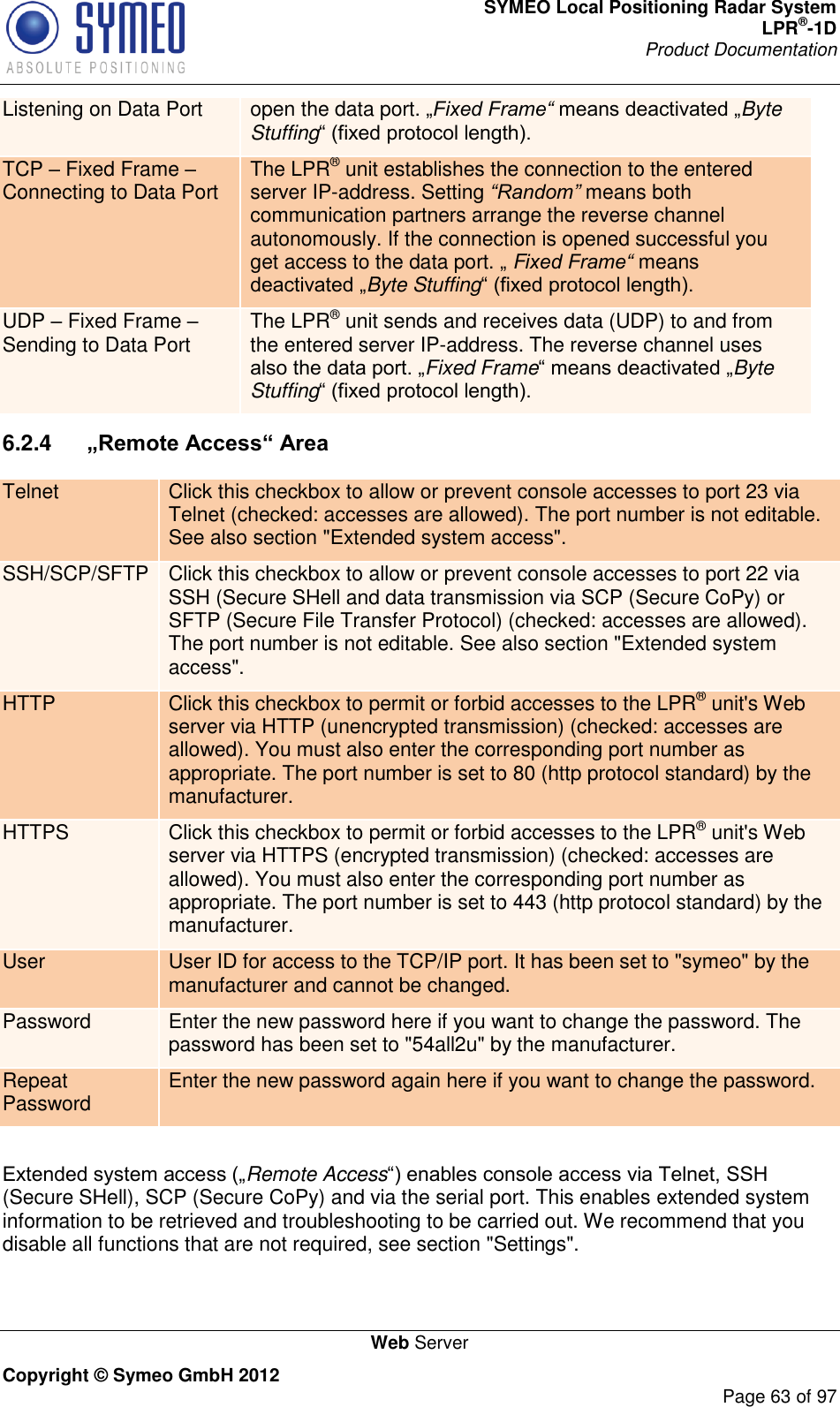
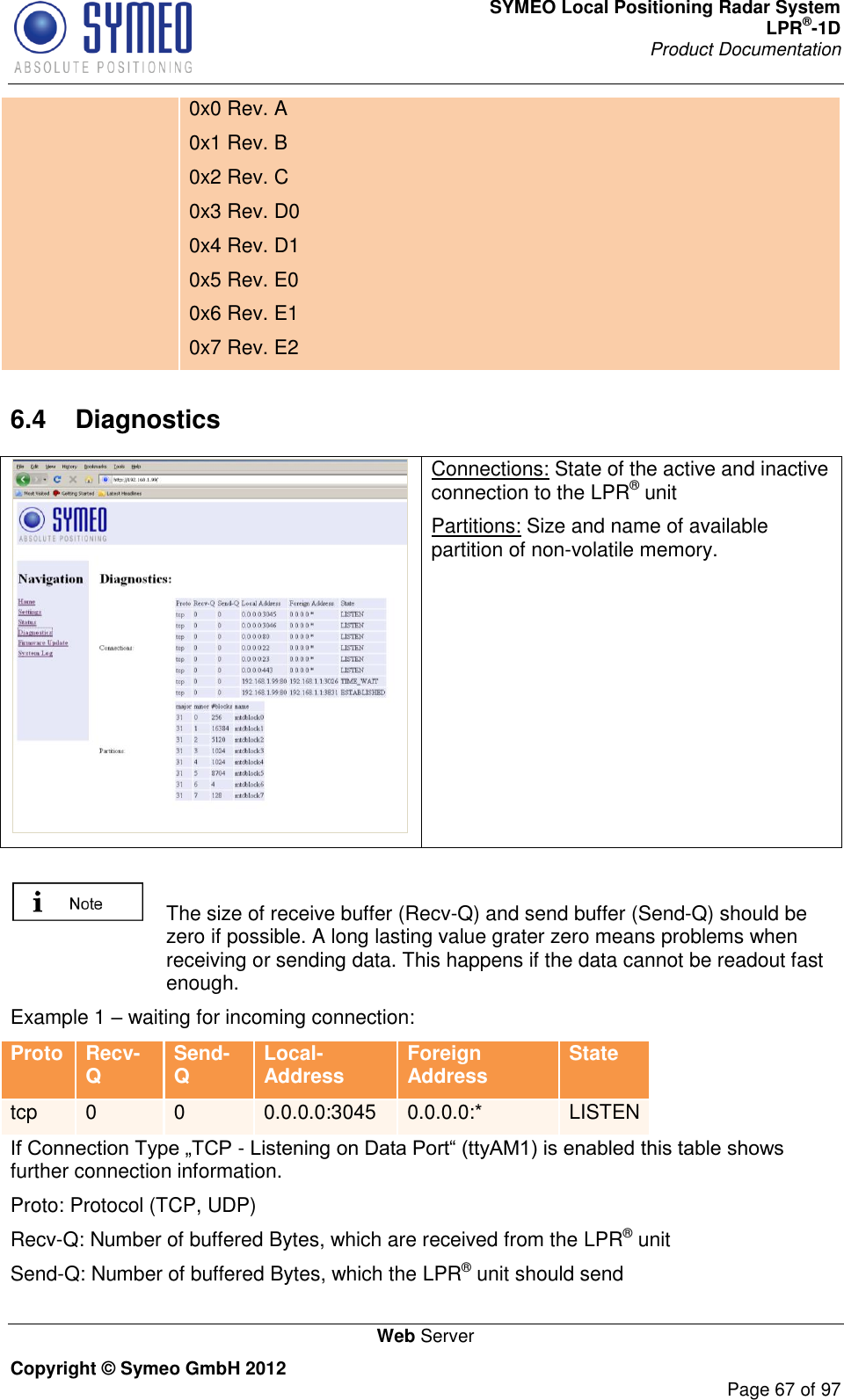
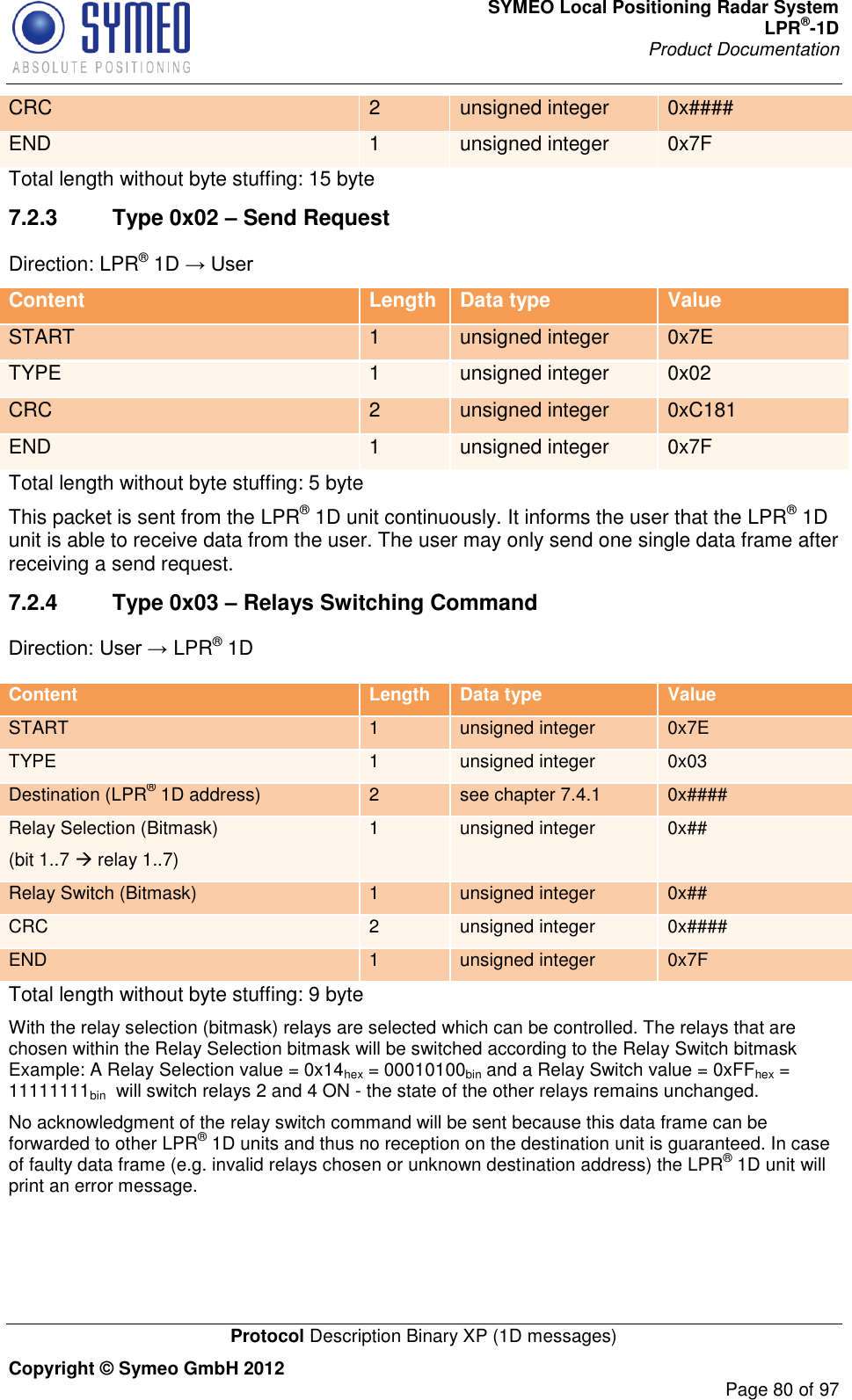
![SYMEO Local Positioning Radar System LPR®-1D Product Documentation Appendix A: Agency certifications Copyright © Symeo GmbH 2012 Page 96 of 97 Canada (Industry Canada) This Class [B] digital apparatus complies with Canadian ICES-003. Cet appareil numérique de la classe [B] est conforme à la norme NMB-003 du Canada. This device has been designed to operate with the antennas listed below and having a maximum gain of 23 dBi. Antennas not included in this list or having a gain greater than 23 dBi are strictly prohibited. The required impedance for antenna and antenna cable is 50 ohms. Only antenna cables delivered by Symeo are allowed to use. Usage of other antenna cables may void the IC authorization to operate this equipment. 6 dBi Omnidirectional Antenna 10 dBi Omnidirectional Antenna23 dBi Planar Antenna8,5°vertical-3 dB0 dB-3 dBvertical9° -3 dB0 dB-3 dB horizontal9° -3 dB0 dB-3 dB30°vertical -3 dB0 dB-3 dBA A A A = 190mmd = 20mmA = 440mmd = 20mmB A = 305mmB = 305mmd = 25mmAntenna Connector Type NAntenna Connector Type NAntenna Connector Type N13 dBi Sector Antenna horizontal180°-3 dB0 dB-3 dBA dB A = 500mmB = 90mmd = 80mm vertical5° -3 dB0 dB-3 dBAntenna Connector Type N Figure 62: LPR® 1D antenna](https://usermanual.wiki/Symeo/PLB000998/User-Guide-1702387-Page-96.png)