Symeo BSB LPR-1D, LPR-2D User Manual Symeo dot
Symeo GmbH LPR-1D, LPR-2D Symeo dot
UserManual.wiki
>
Symeo
>
BSB User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation
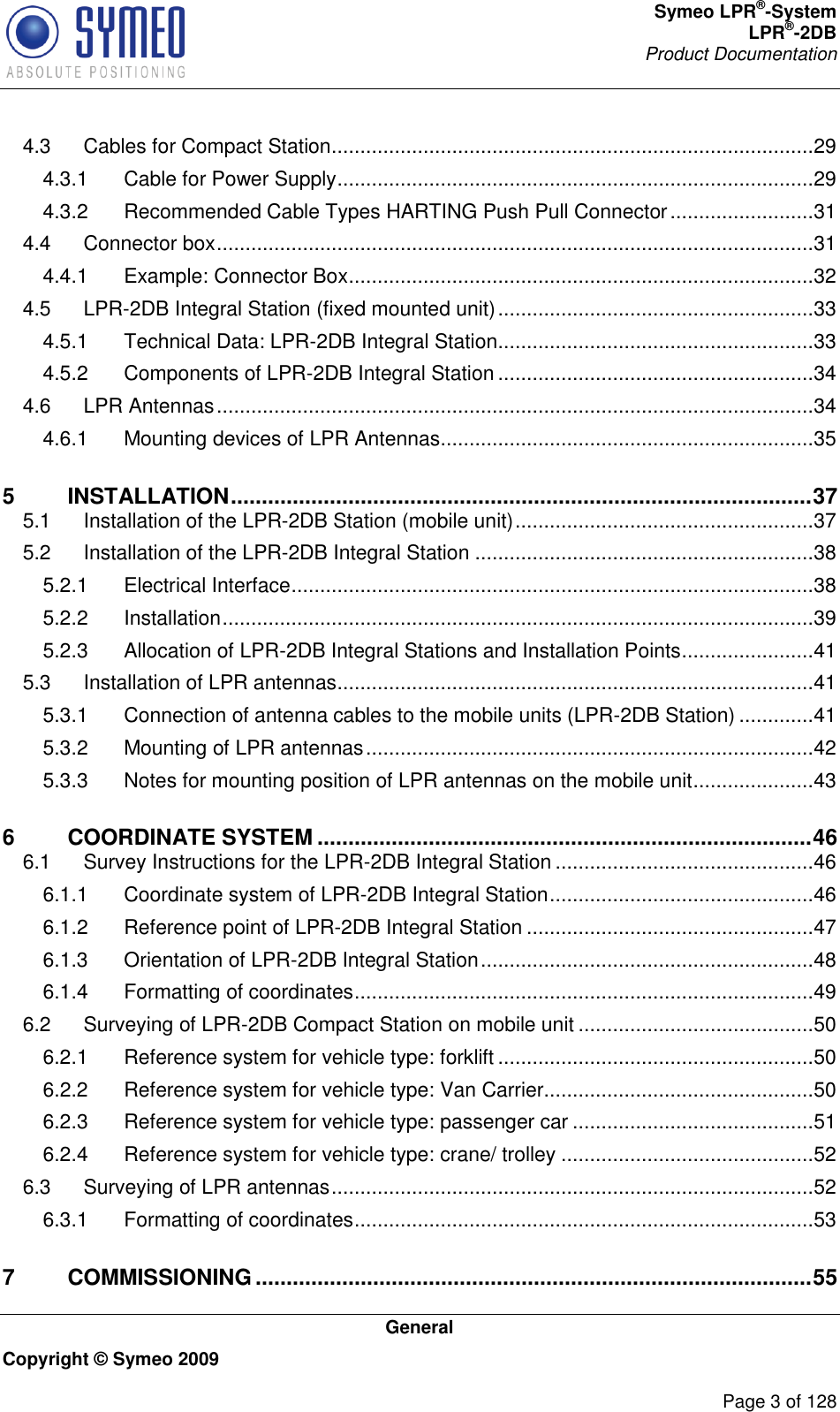


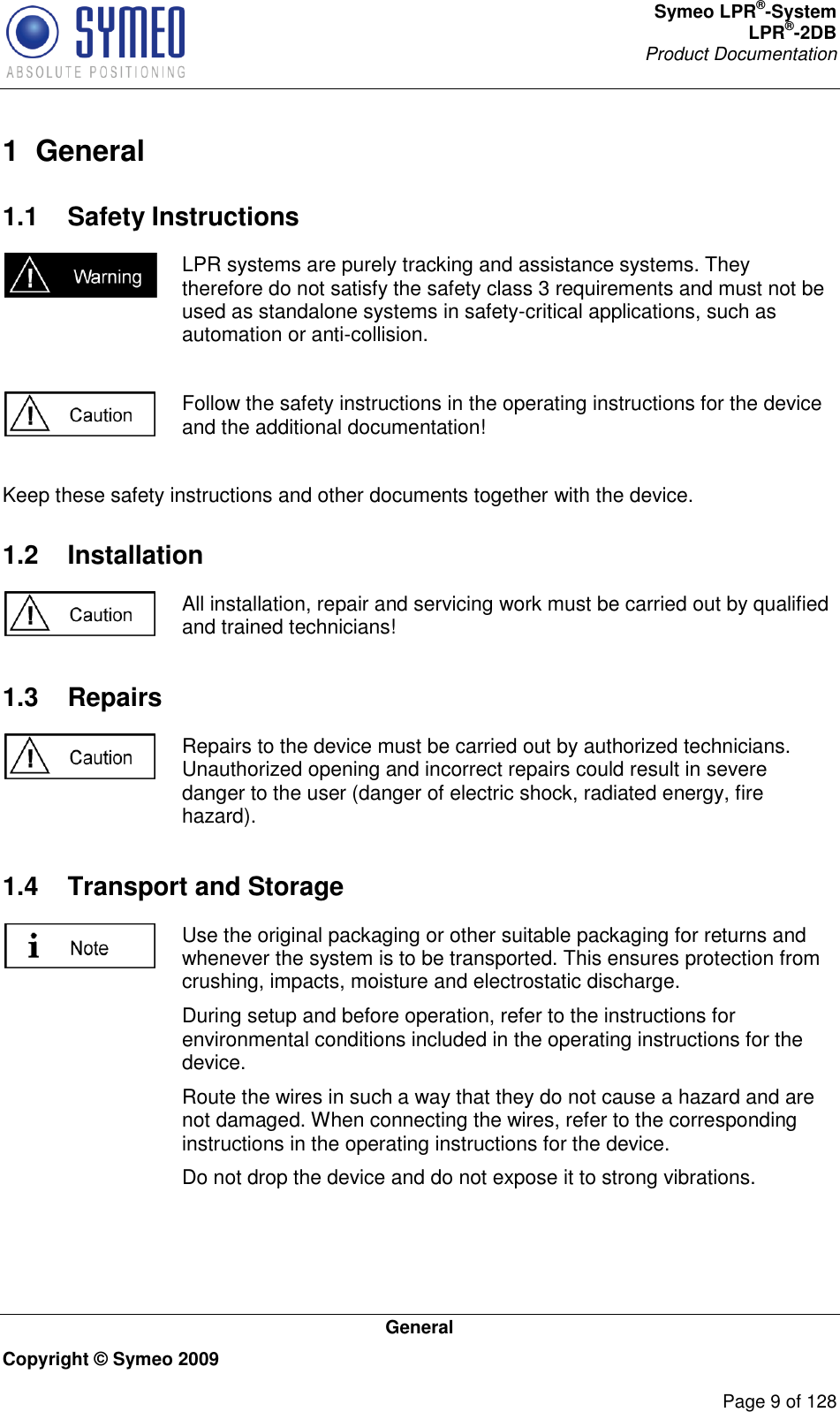

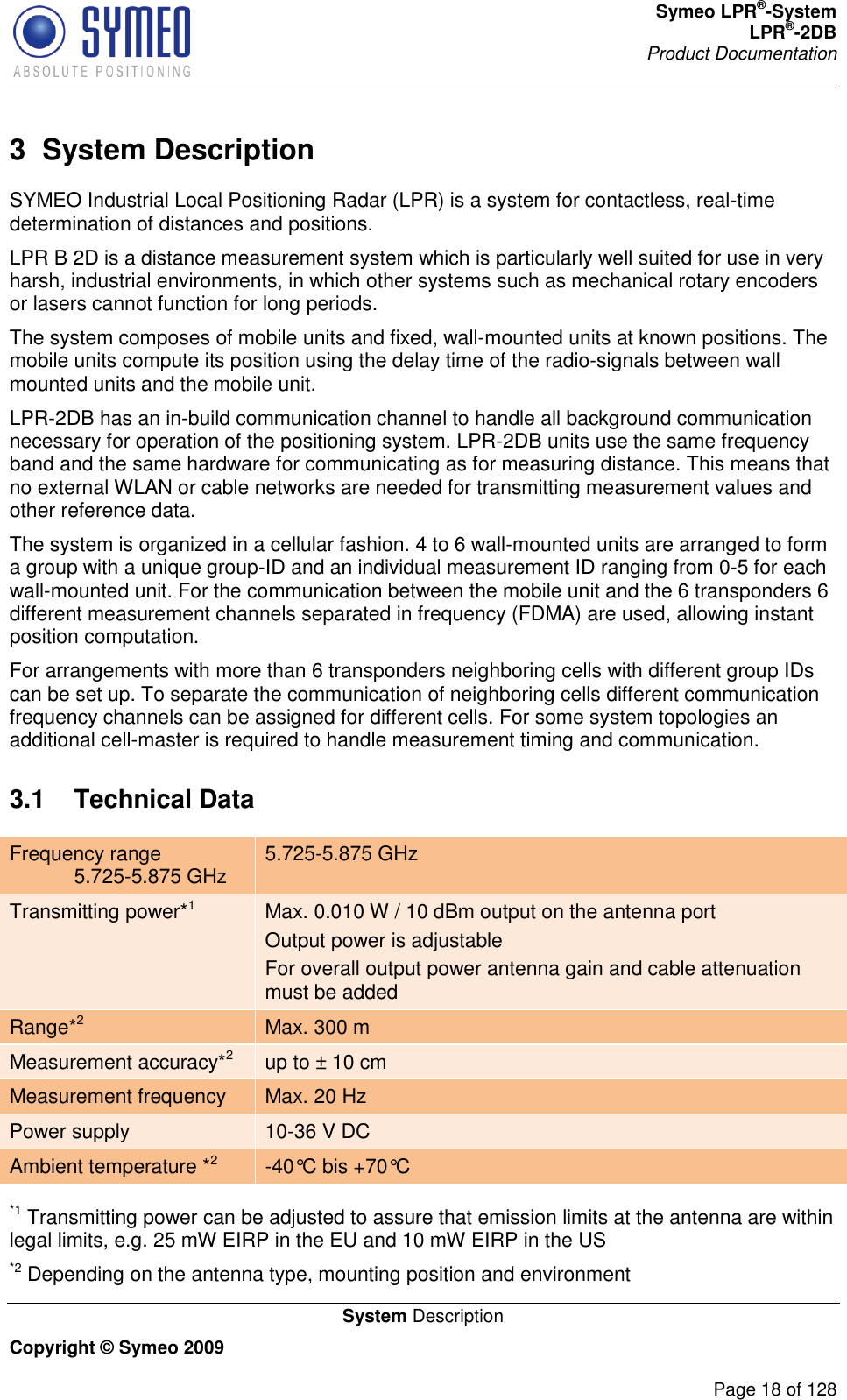
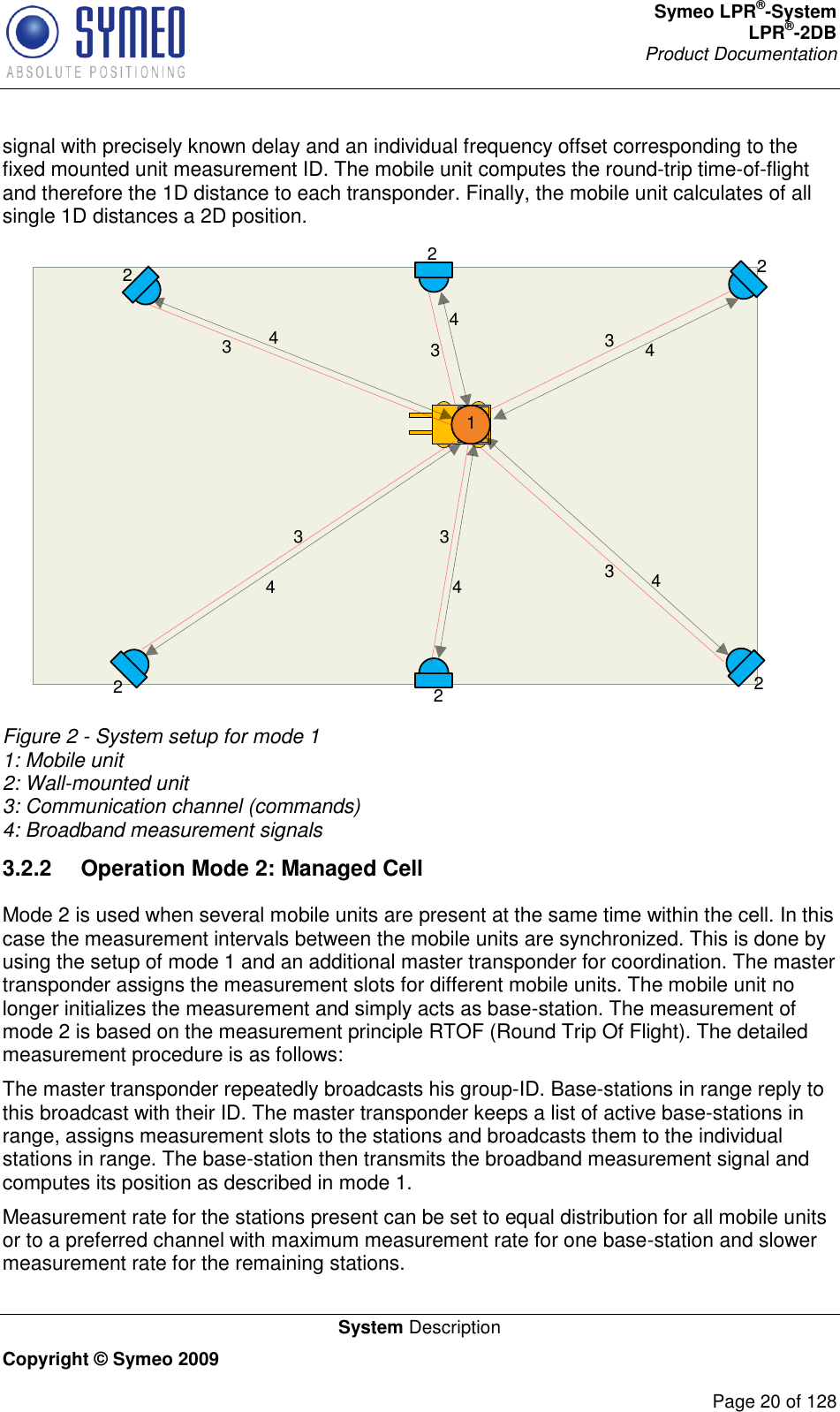
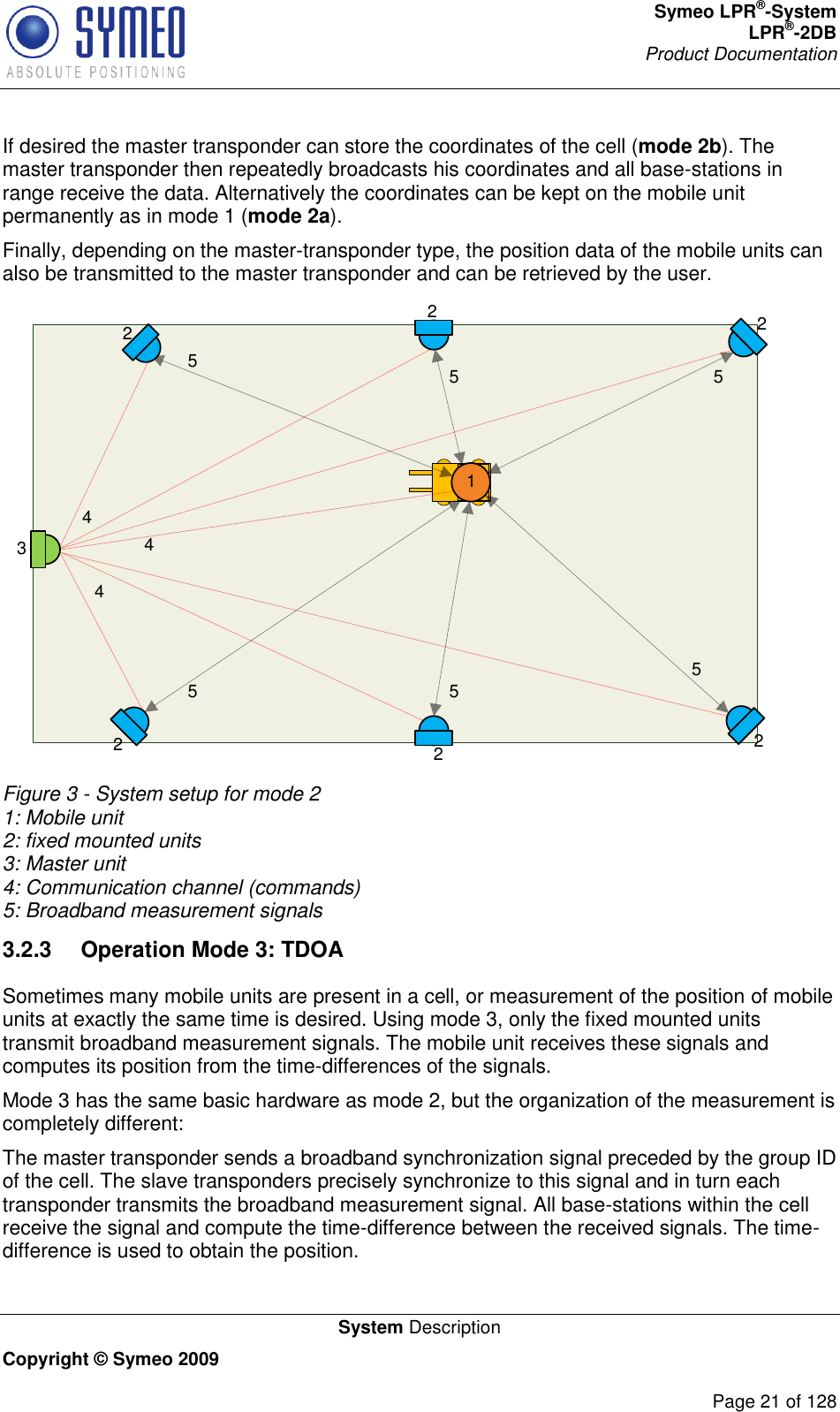
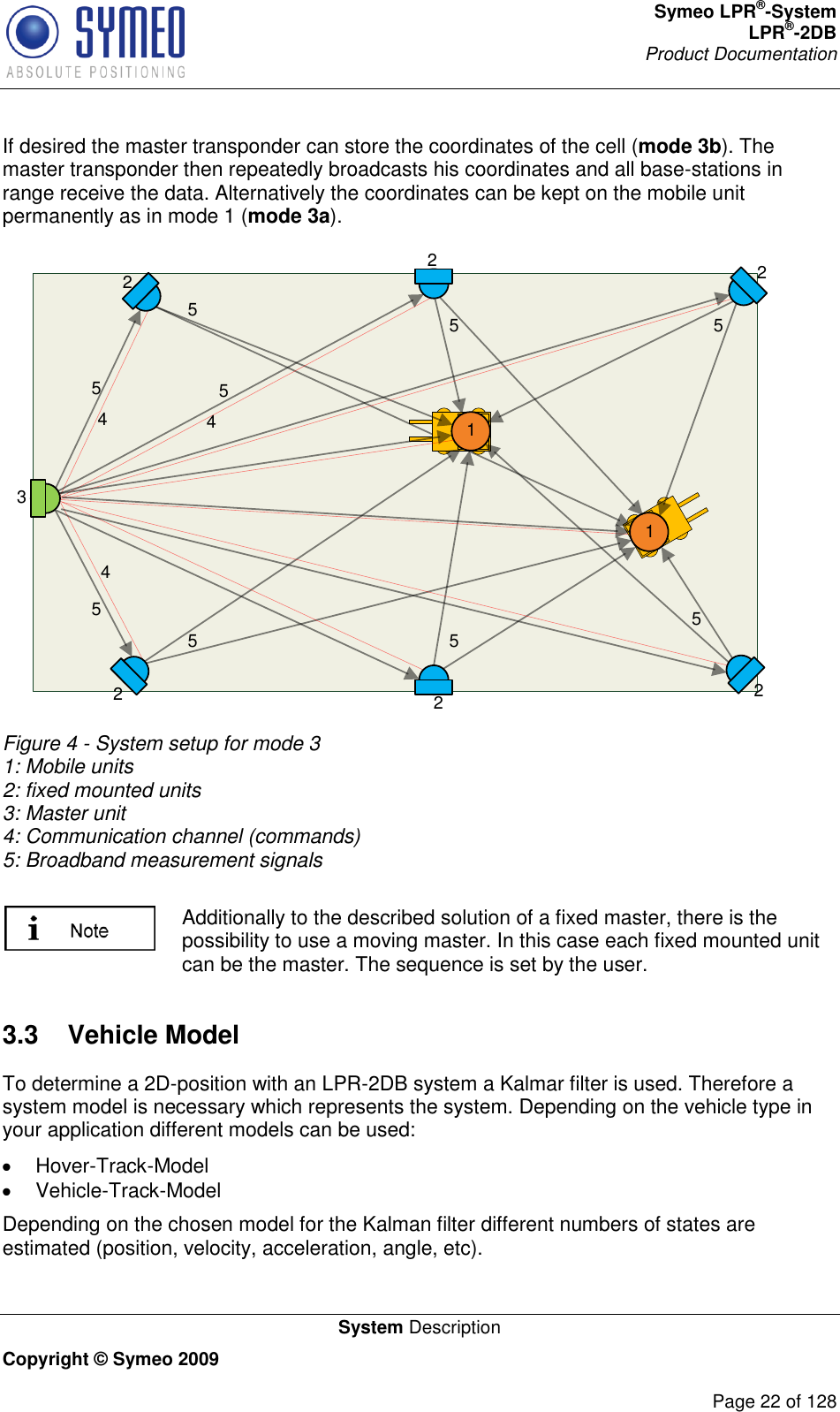
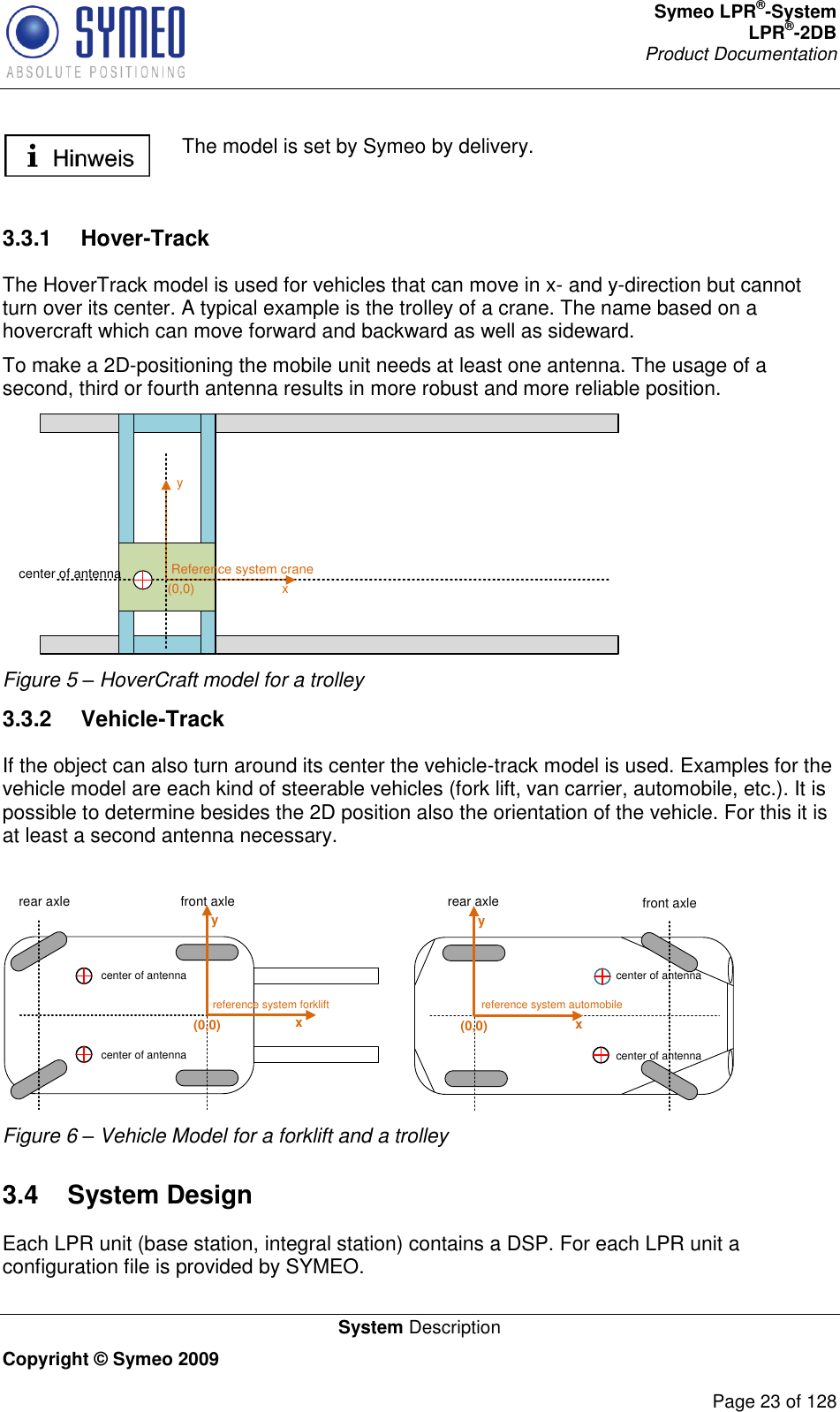
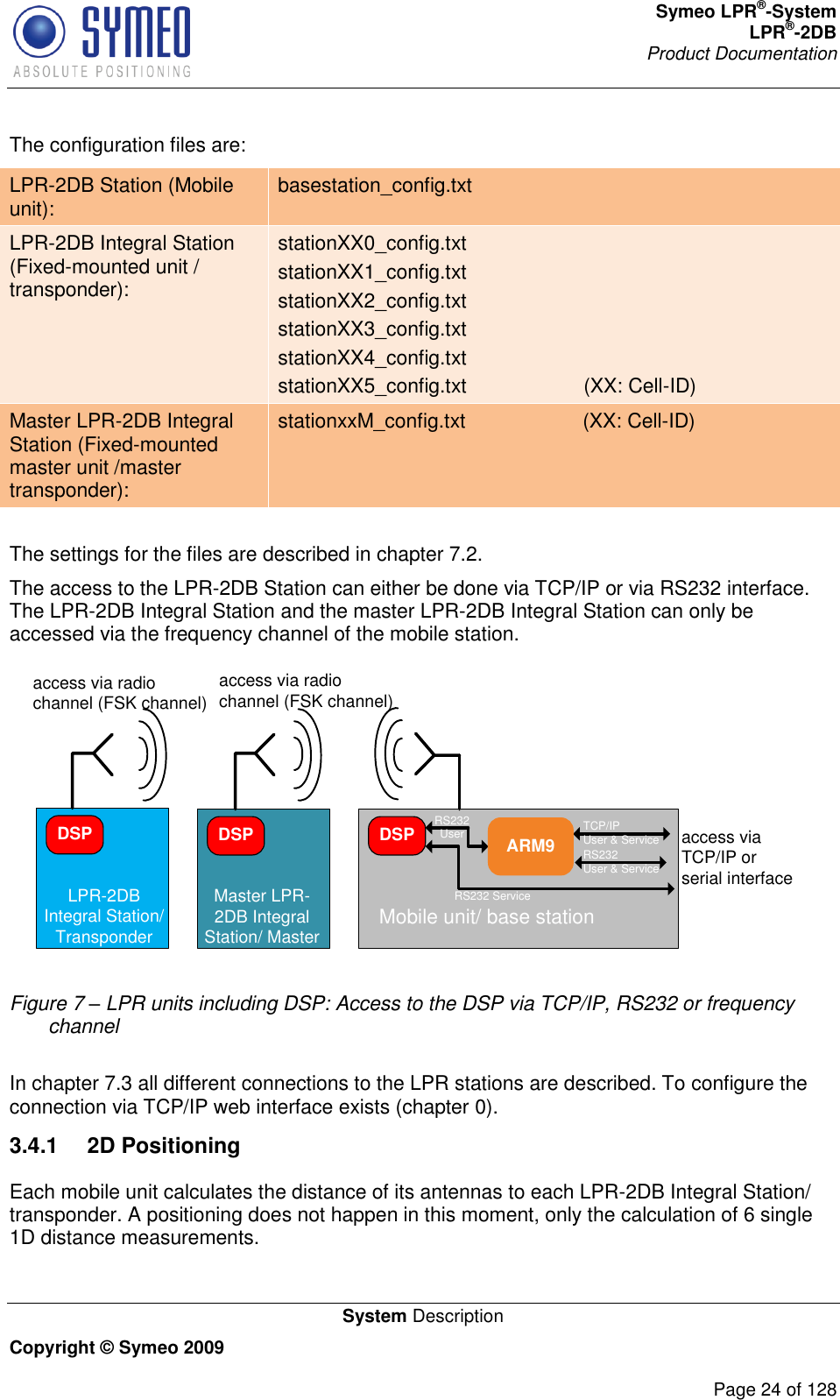
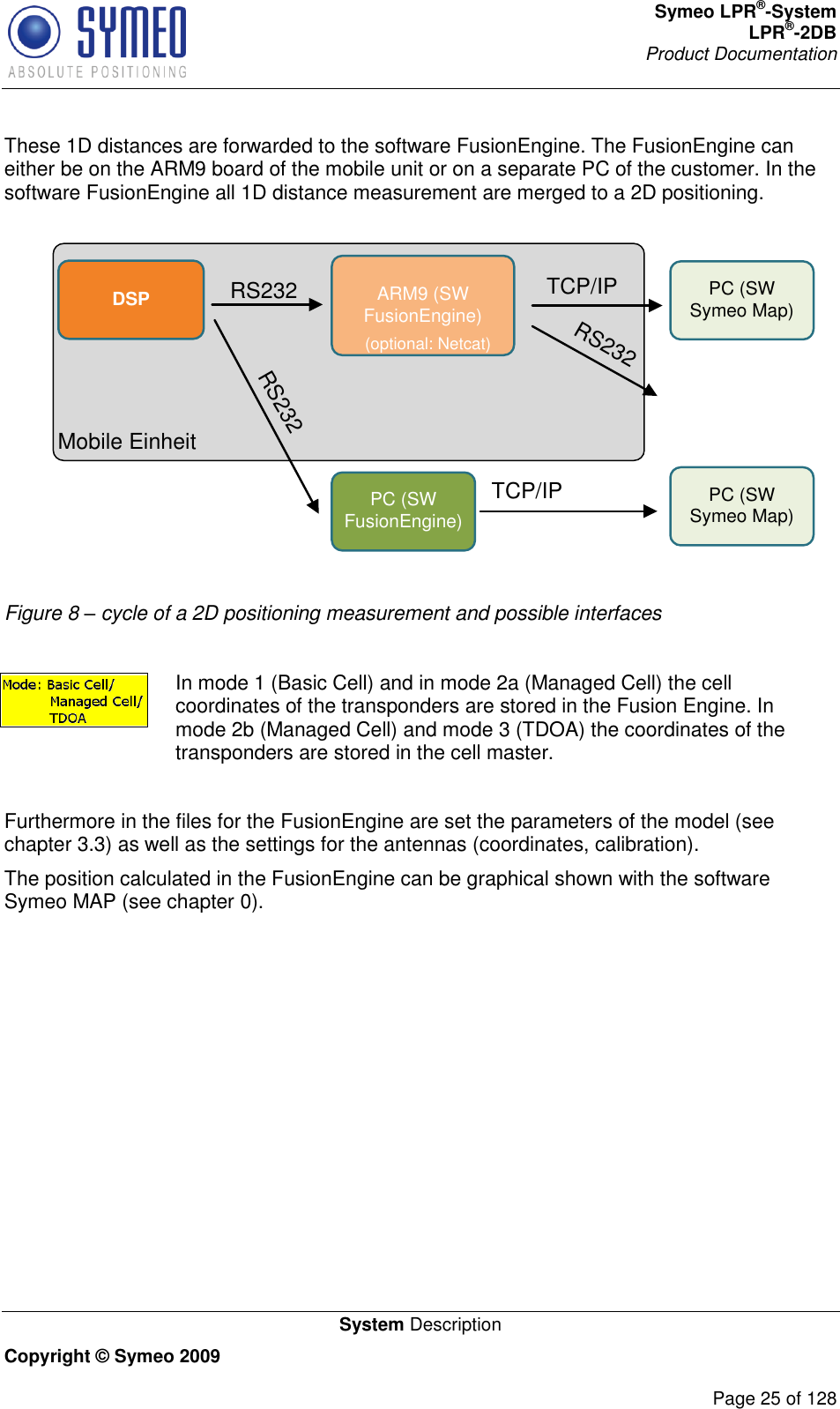
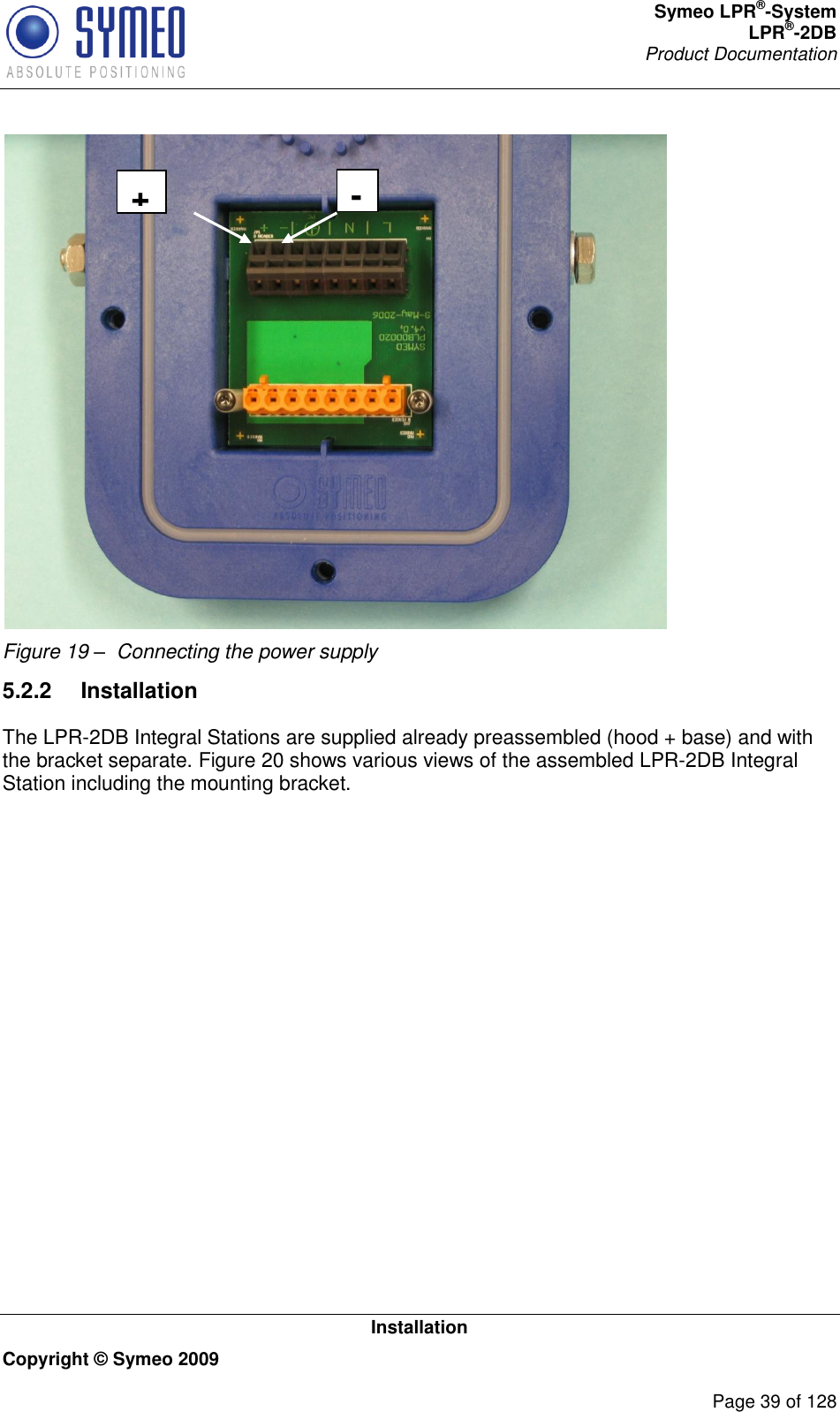
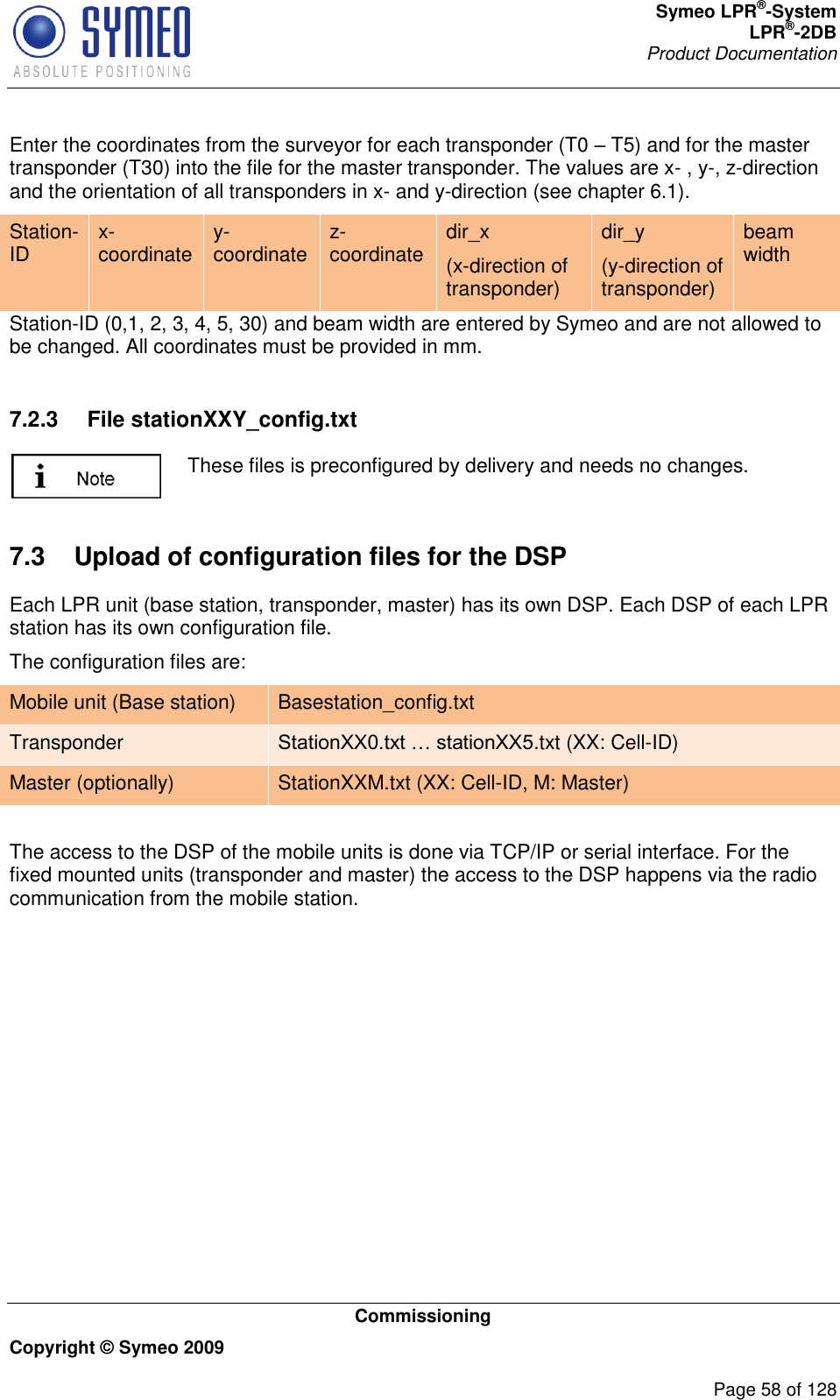
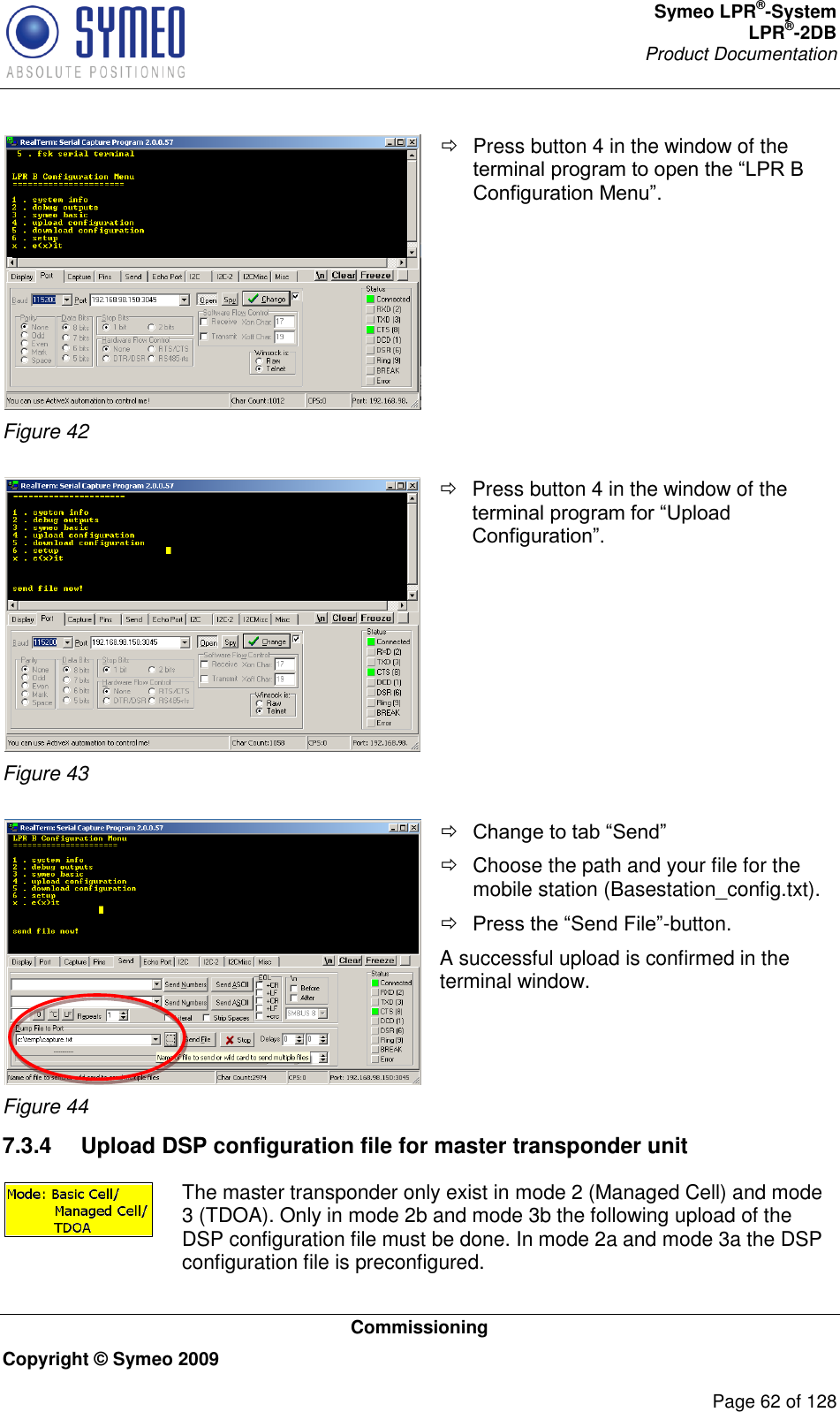
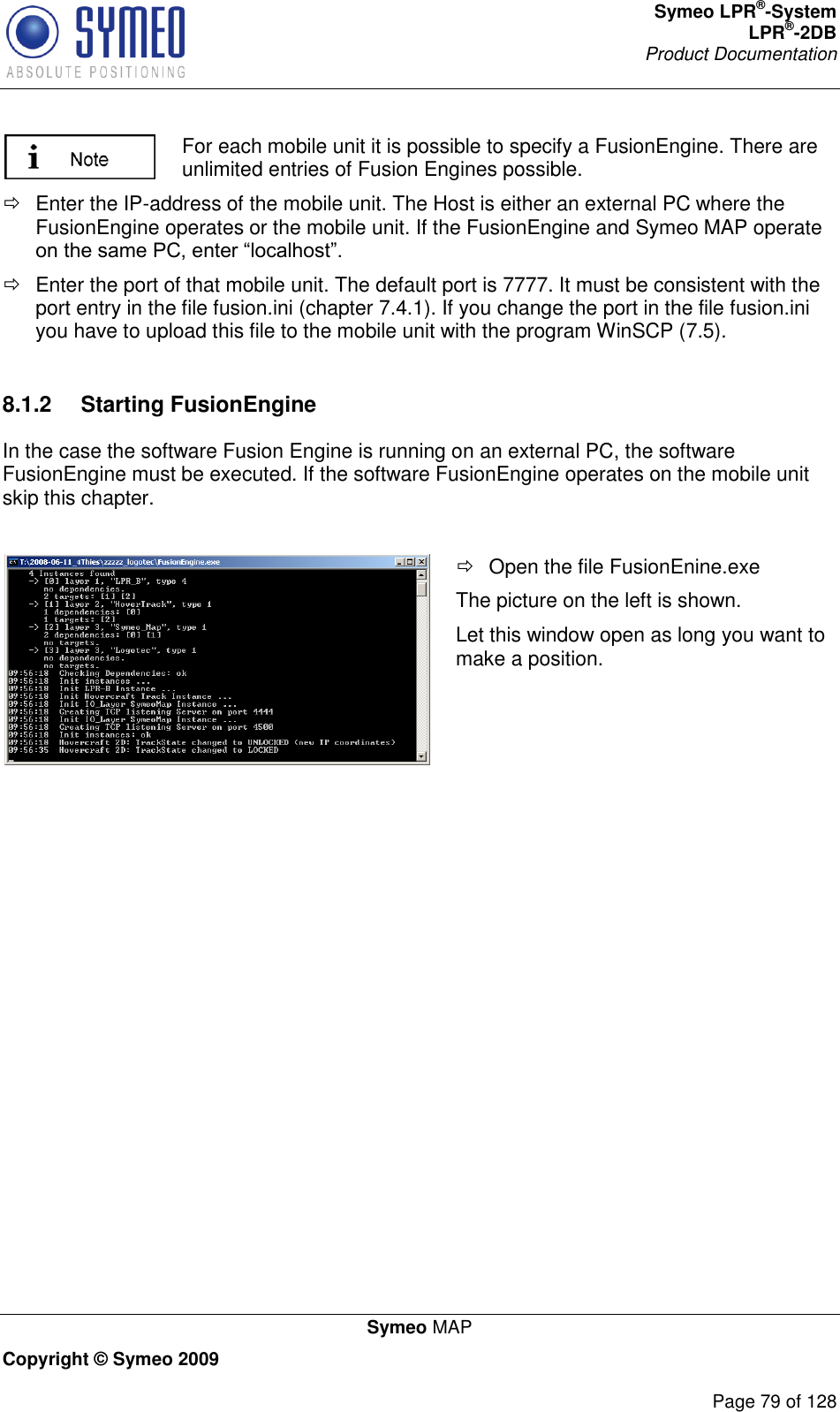
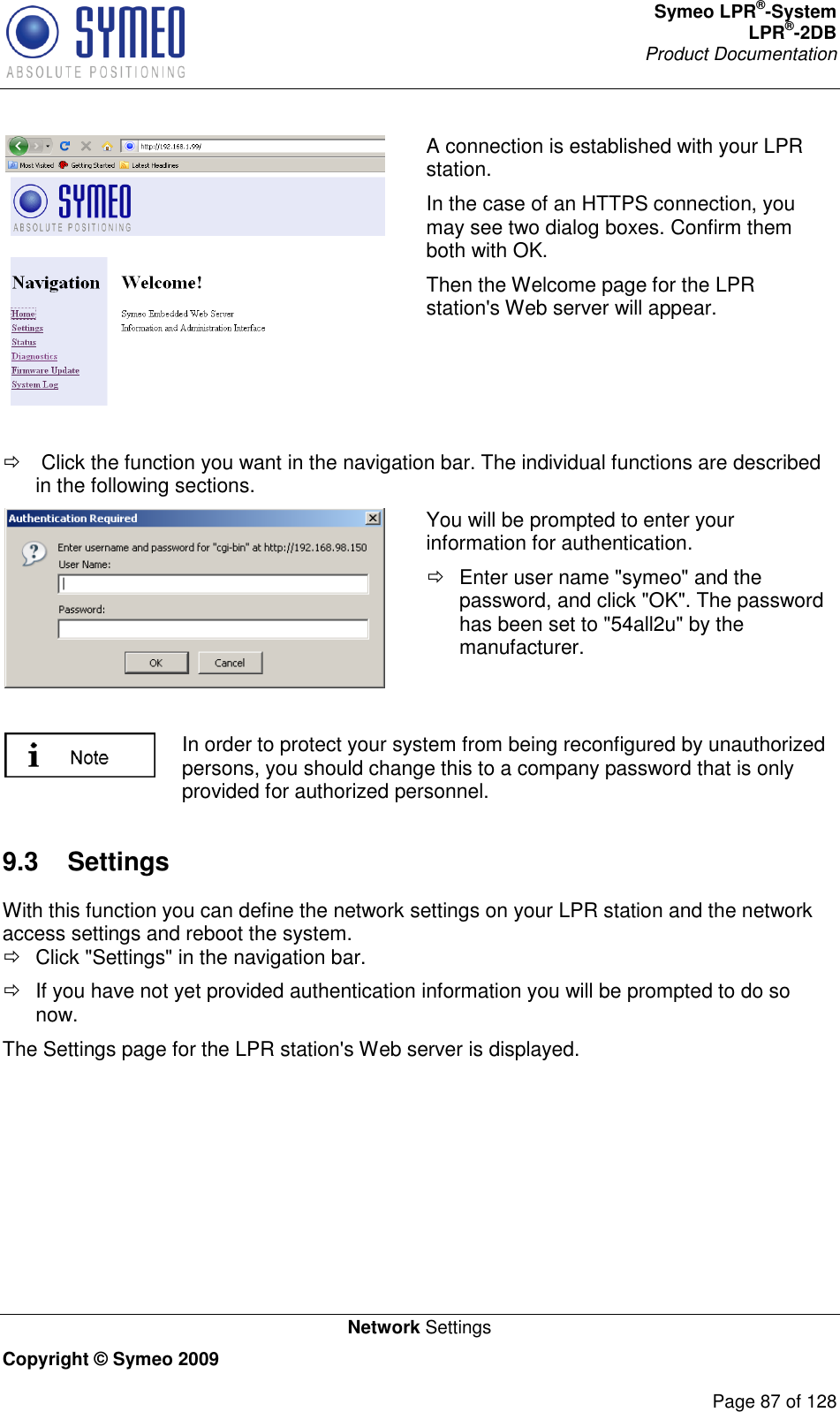
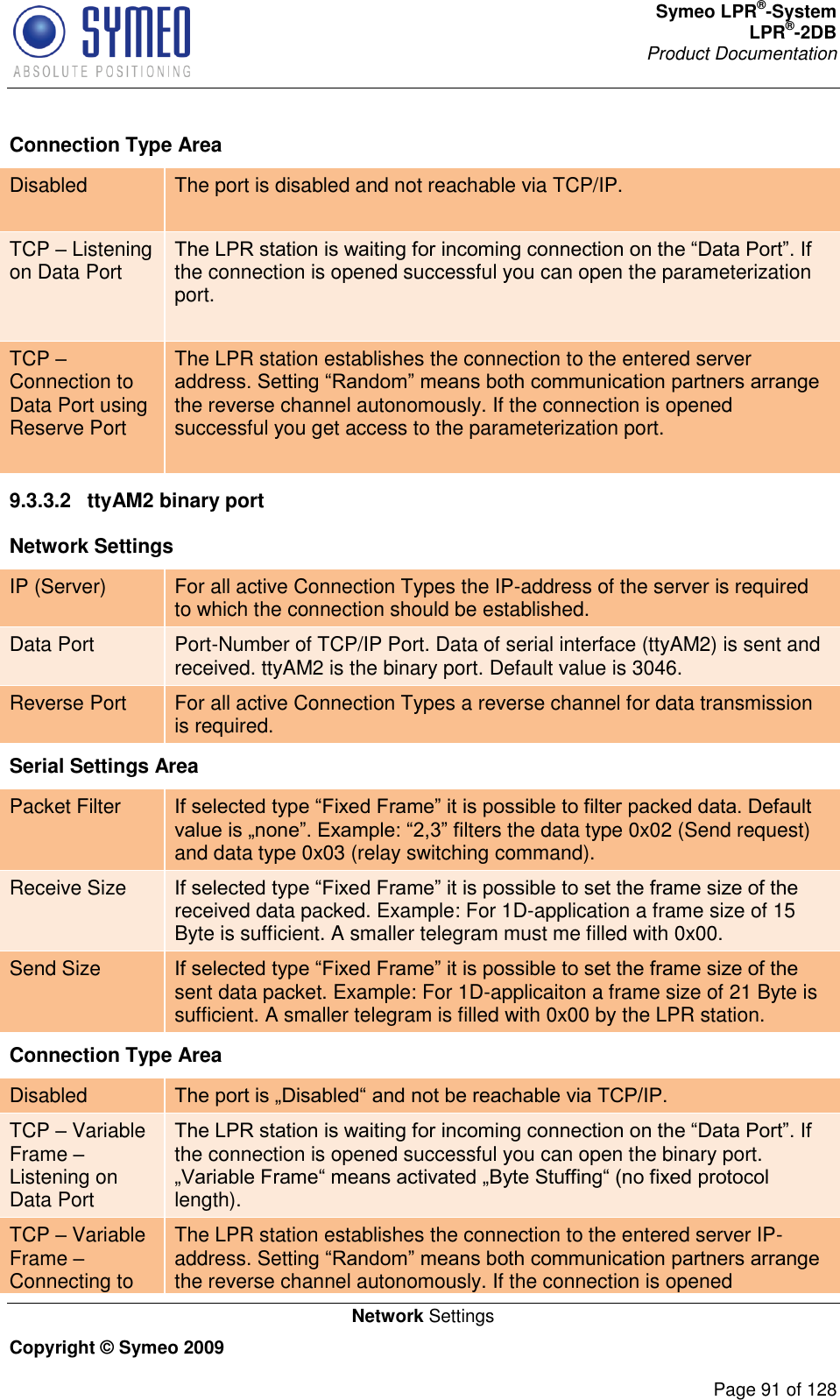
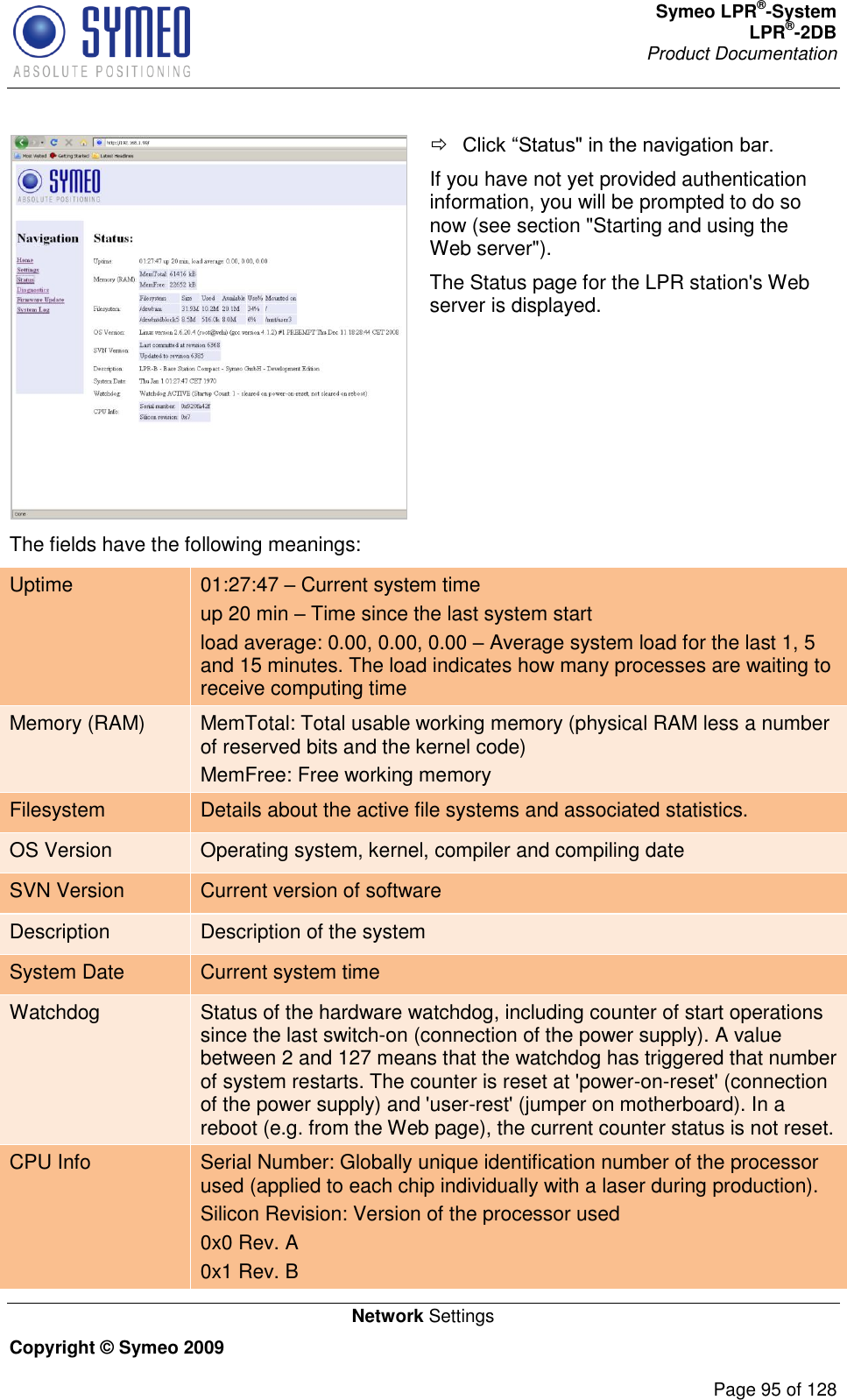
![Symeo LPR®-System LPR®-2DB Product Documentation System Description Copyright © Symeo 2009 Page 19 of 128 *3 Temperature inside the housing can range from -40°C to 85°C. 3.2 Operating Mode There are different system topologies to determine a 2D position with a Symeo LPR® system. Which operating is best suited depends on the application and the environment. It depends on the number of mobile units you want to track and on the number of cells which are necessary to cover the environment. Operating Mode Properties Mode 1: Basic Cell 6 fixed wall-mounted units [LPR-2DB Integral Station], 1 mobile unit [LPR-2DB Station]; measurement principle: RTOF (round trip of flight) Mode 2a: Managed Cell 6 fixed wall-mounted units [LPR-2DB Integral Station], 1Master, up to 5 mobile units [LPR-2DB Station] ; measurement principle: RTOF (round trip of flight); cell coordinates are stored on the mobile unit(s) Mode 2b: Managed Cell 6 fixed wall-mounted units [LPR-2DB Integral Station], 1 Master, up to 10 mobile units [LPR-2DB Station] ; measurement principle: RTOF (round trip of flight); cell coordinates are stored at the master Mode 3a: TDOA 6 fixed wall mounted units [LPR-2DB Integral Station], 1 Master, no limitation of mobile units [LPR-2DB Station] ; measurement principle: TDOA (time difference of arrival); cell coordinates are stored on the mobile unit(s) Mode 3b. TDOA 6 fixed wall mounted units [LPR-2DB Integral Station], 1 Master, no limitation of mobile units [LPR-2DB Station] ; measurement principle: TDOA (time difference of arrival); cell coordinates are stored at the master The operating mode is normally set by Symeo after consulting the customer. 3.2.1 Operation Mode 1: Basic Cell 4-6 fixed mounted units (i.e. at a wall or on light poles) at known positions as basic cell and one single mobile unit form the setup for mode 1. The fixed mounted units are configured as same group ID and a different measurement ID ranging from 0...5. Additionally, the units within the same group must be set to the same communication channel. The positions of the fixed mounted units are known to the mobile unit. The measurement of mode 1 is based on the measurement principle RTOF (Round Trip Of Flight). It is organized as follows: -fixed mounted units. The fixed mounted units synchronize to this signal and transmit a return](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-19.png)
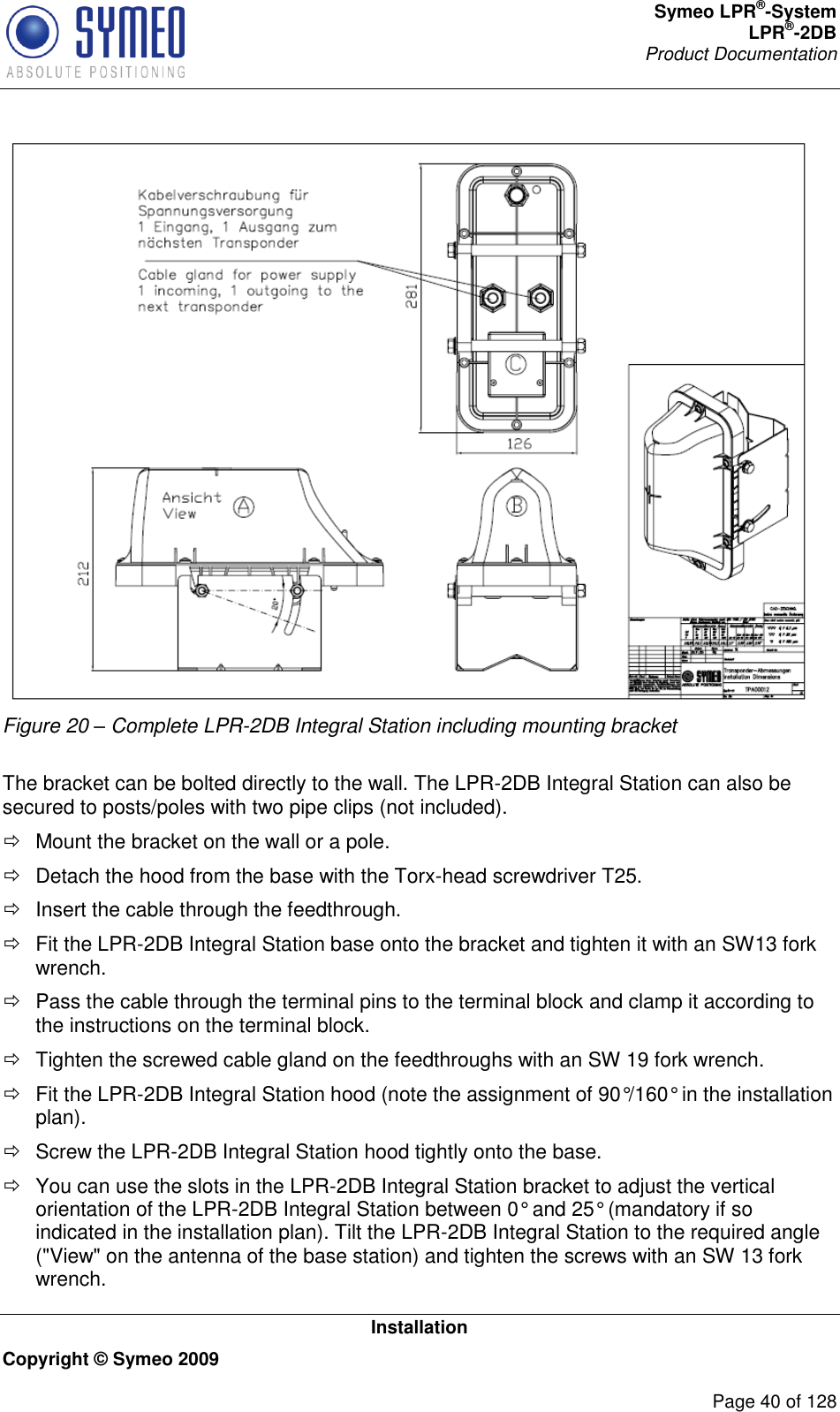
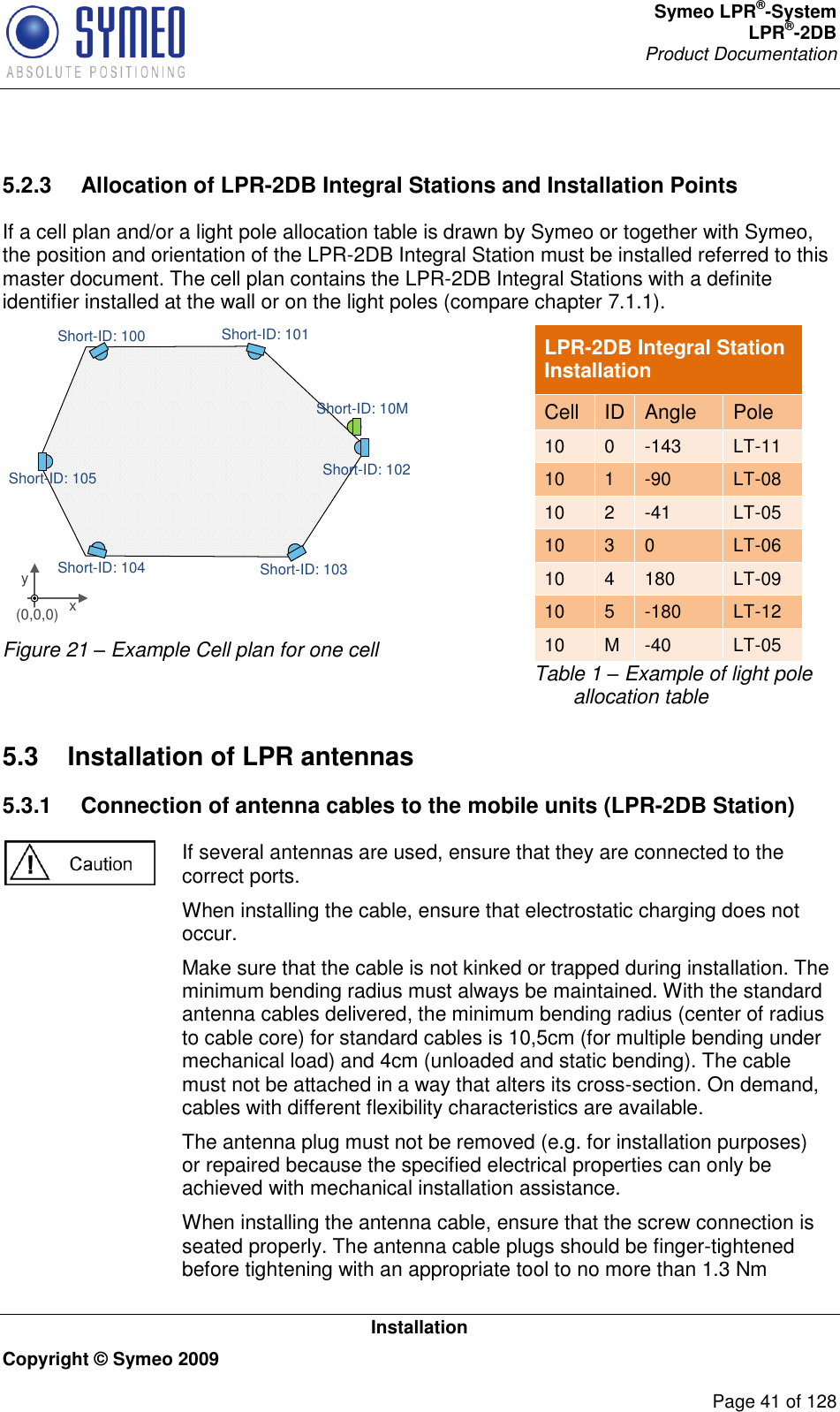
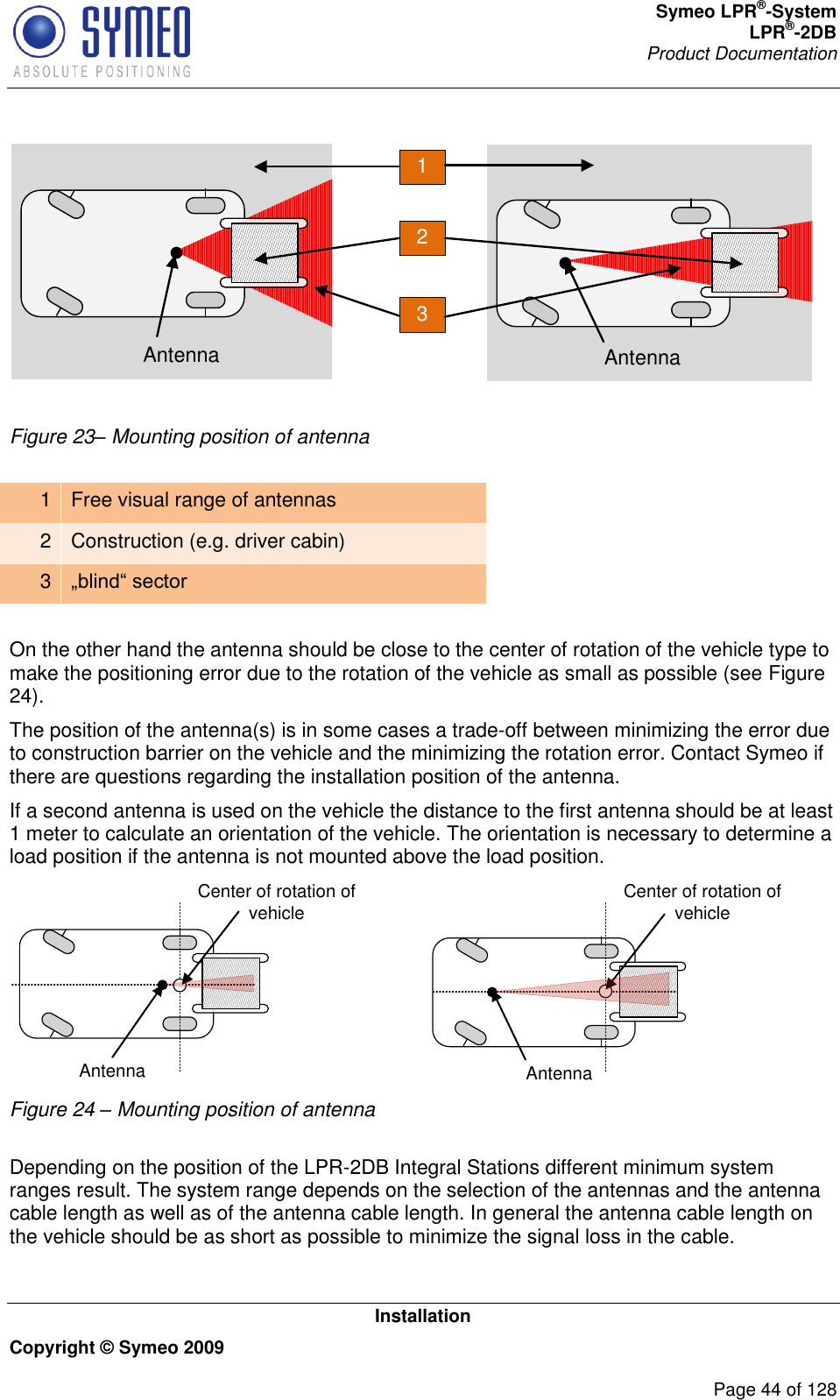

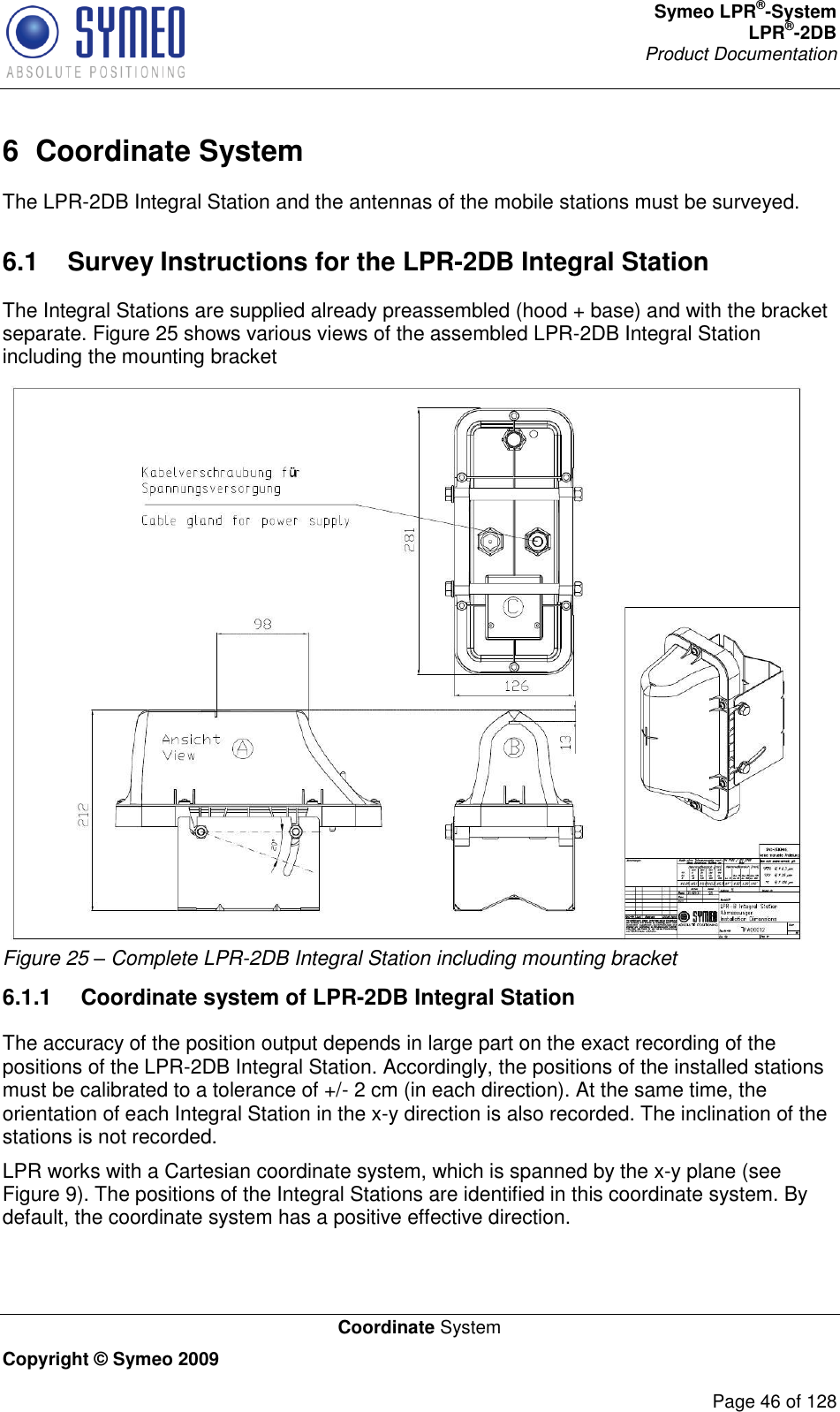
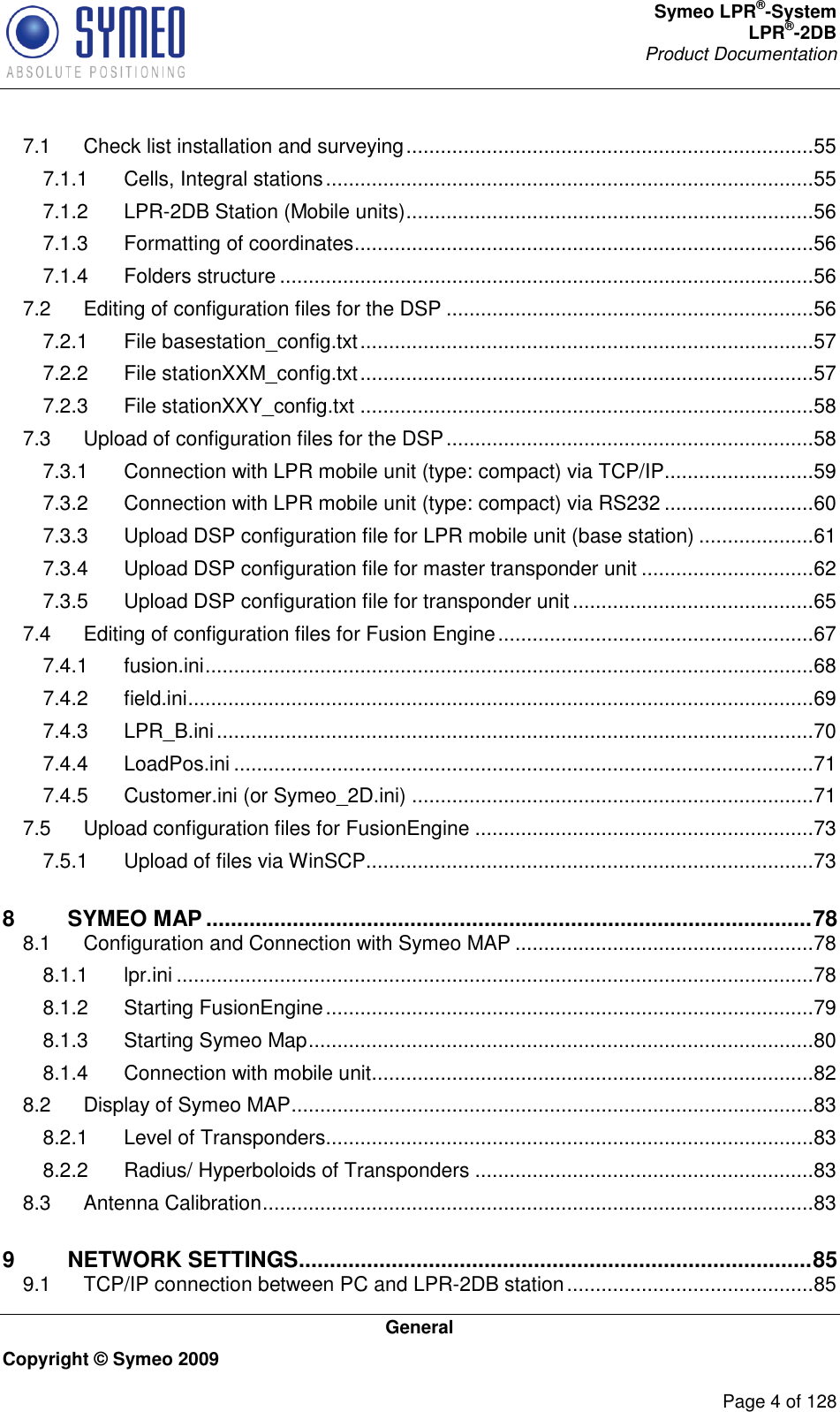
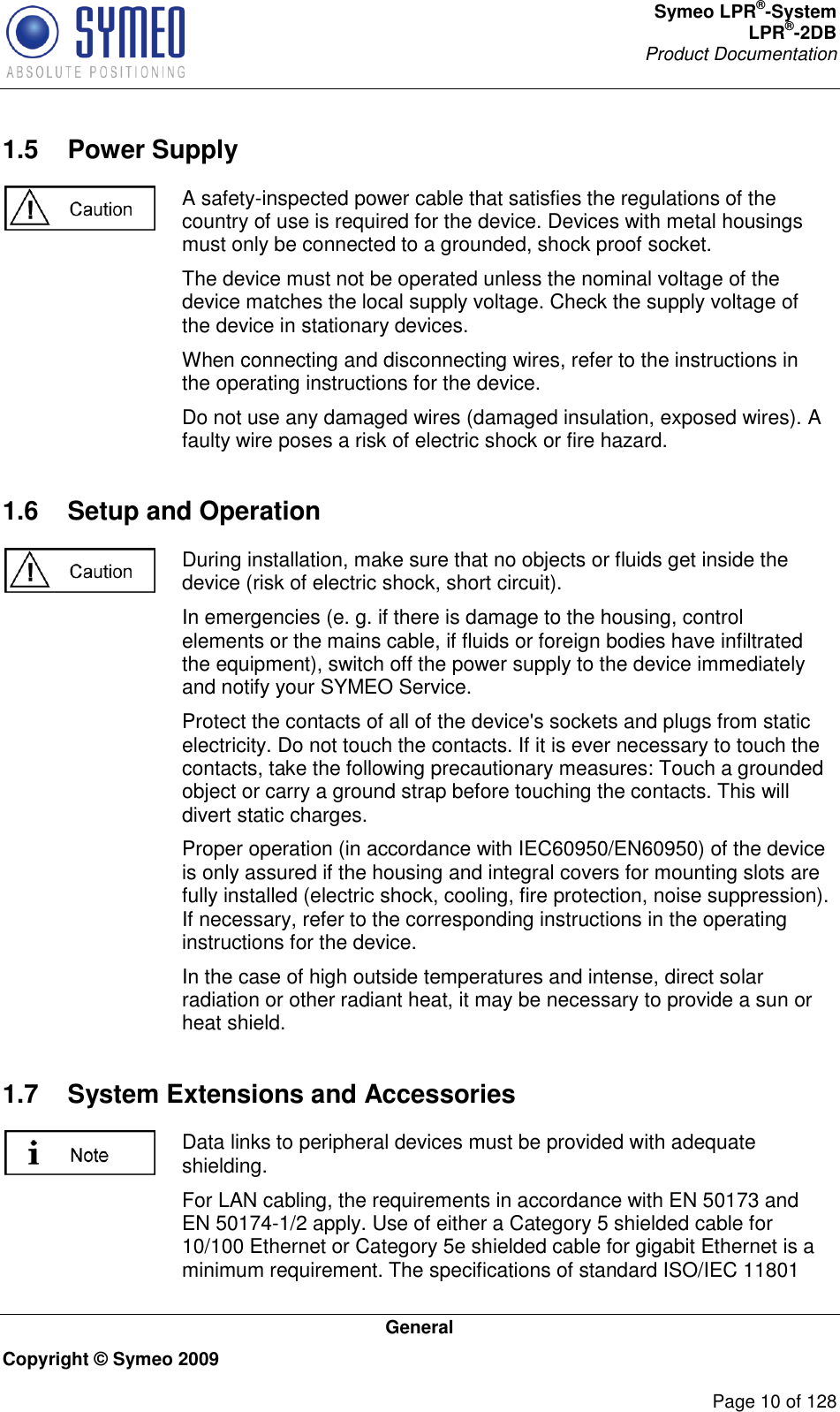
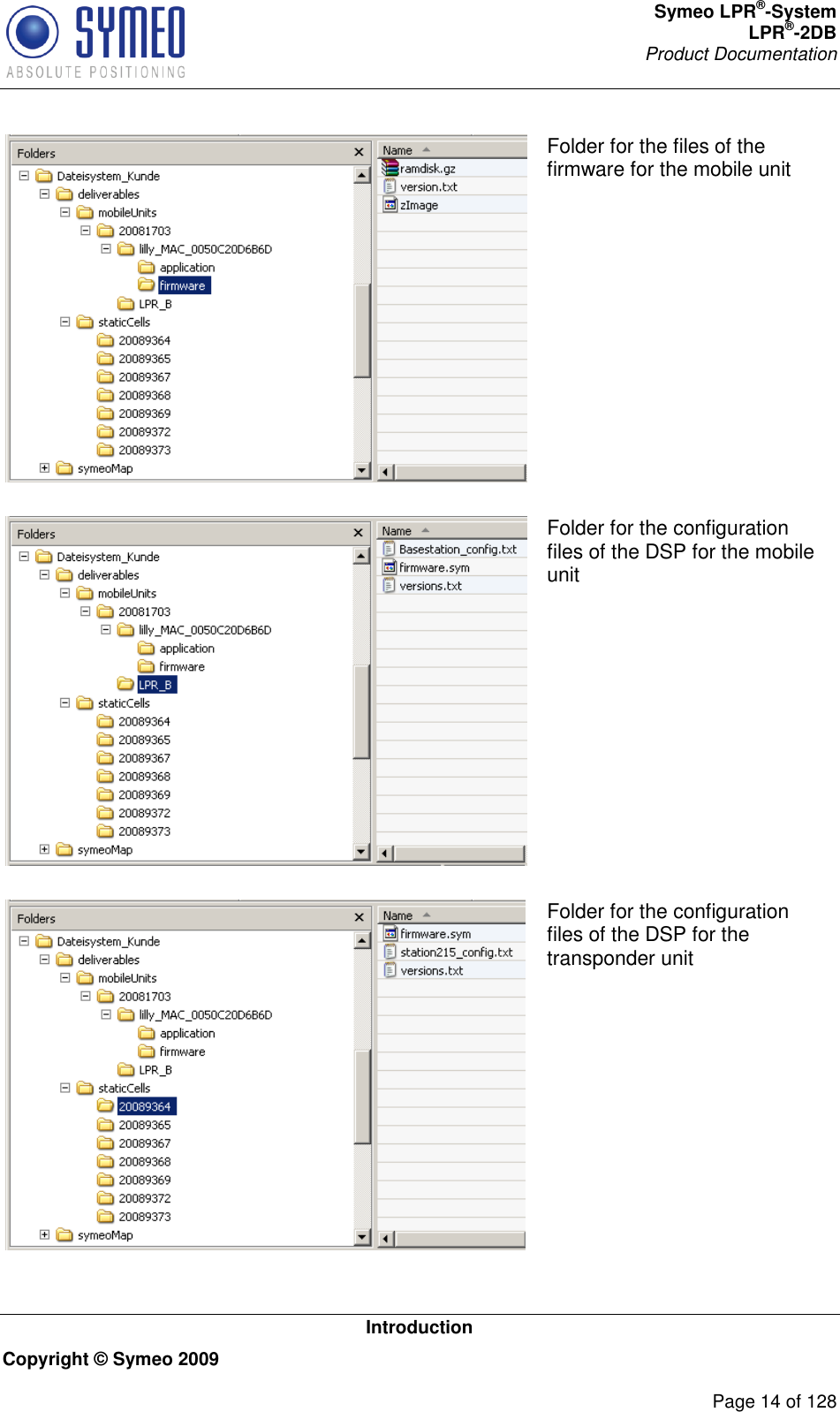
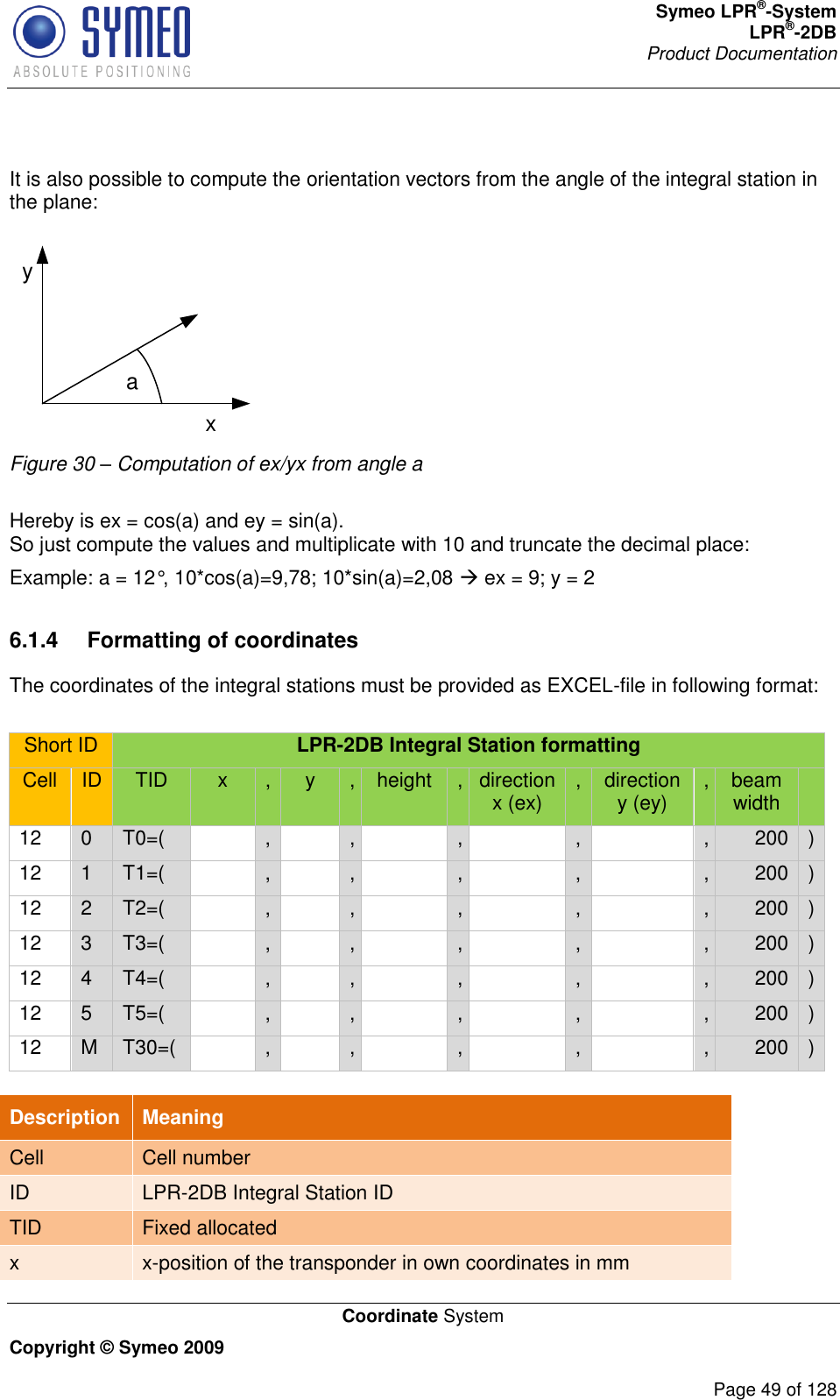
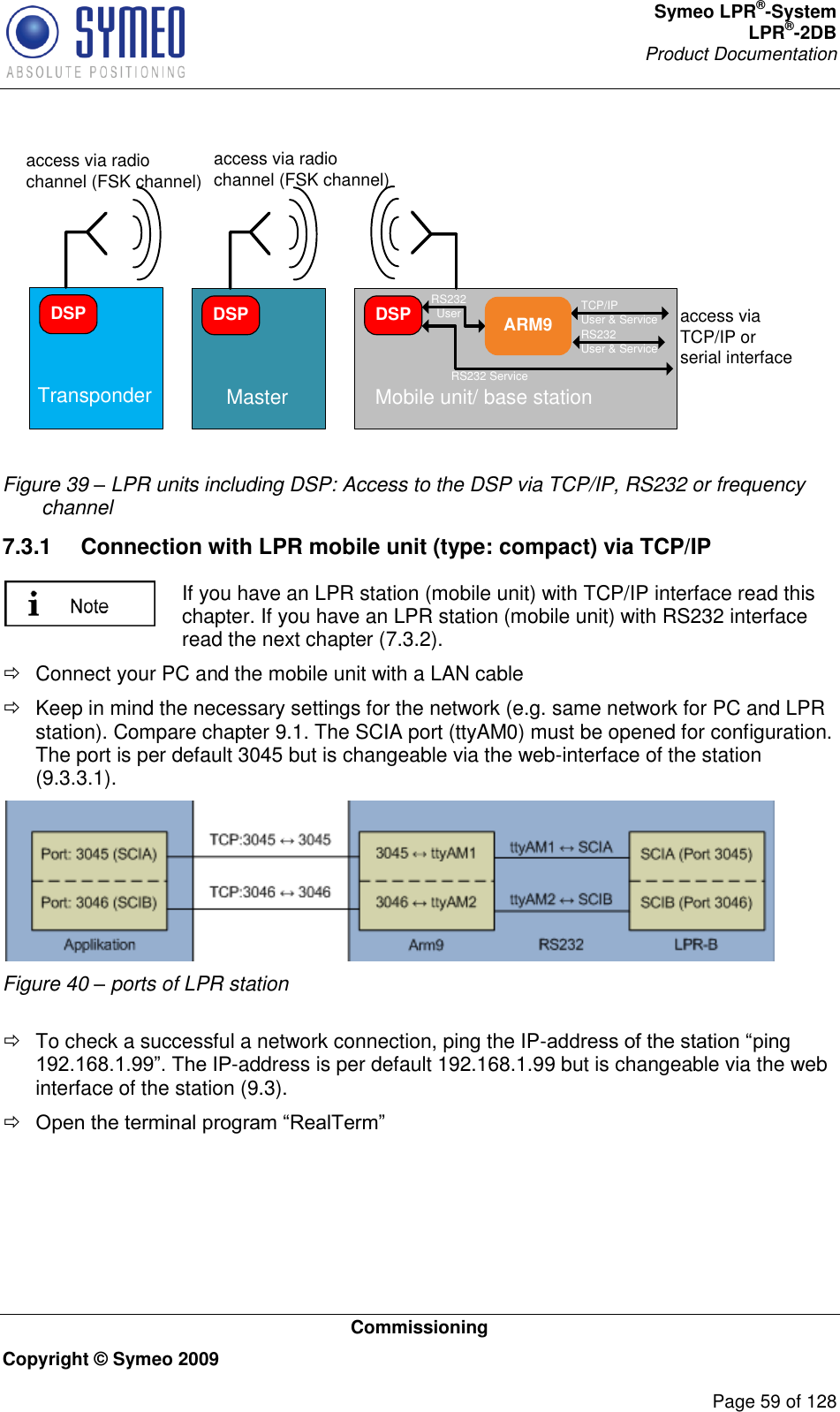
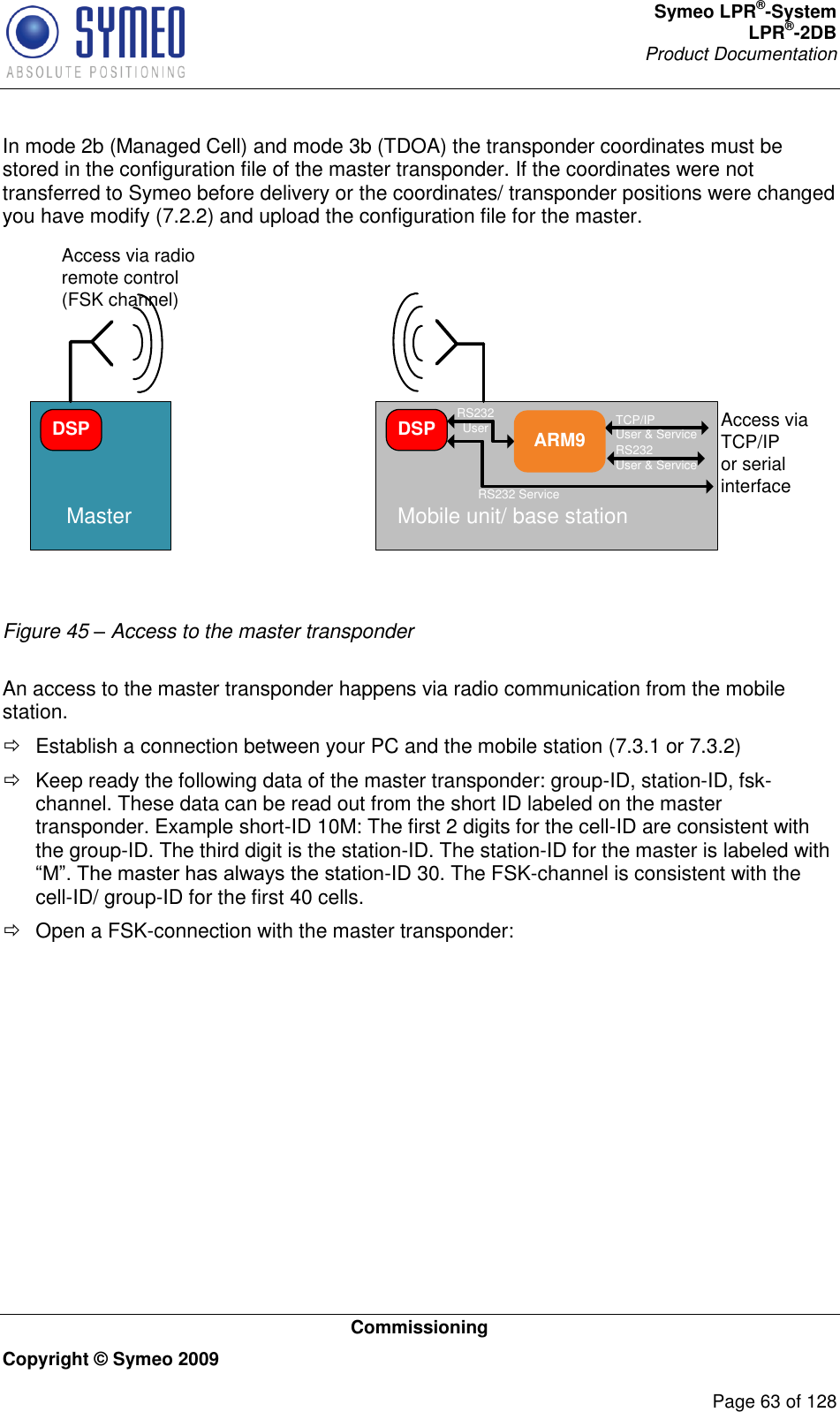
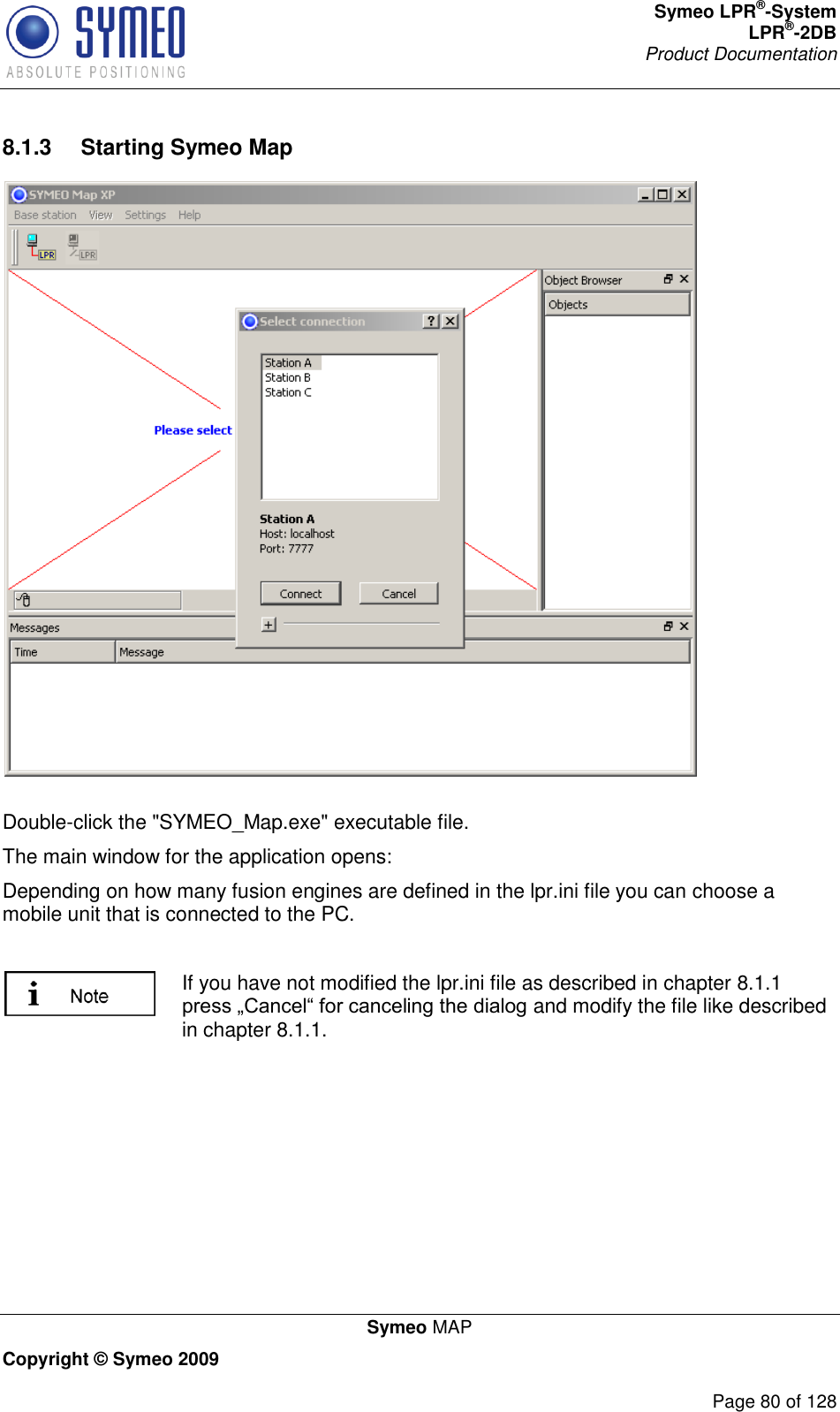
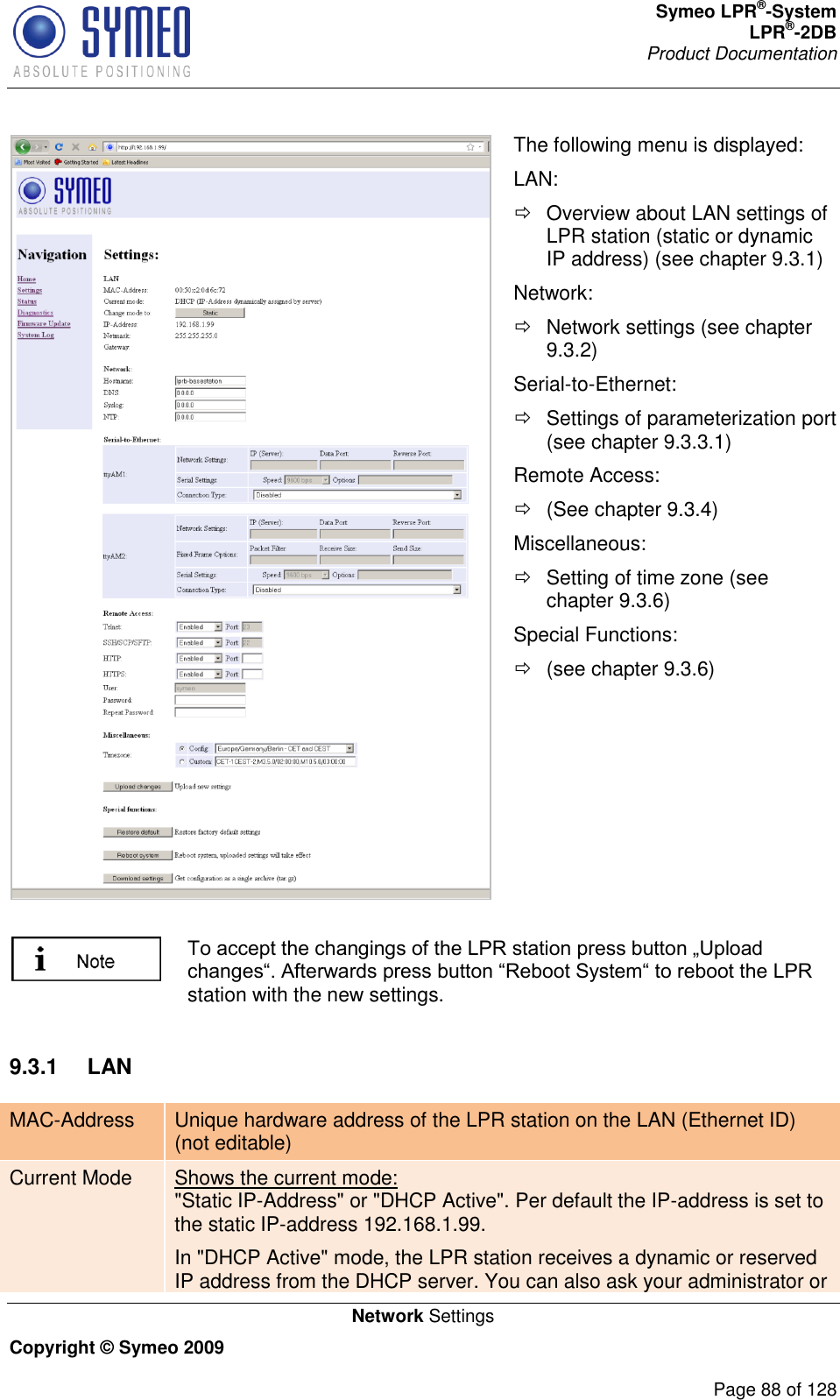
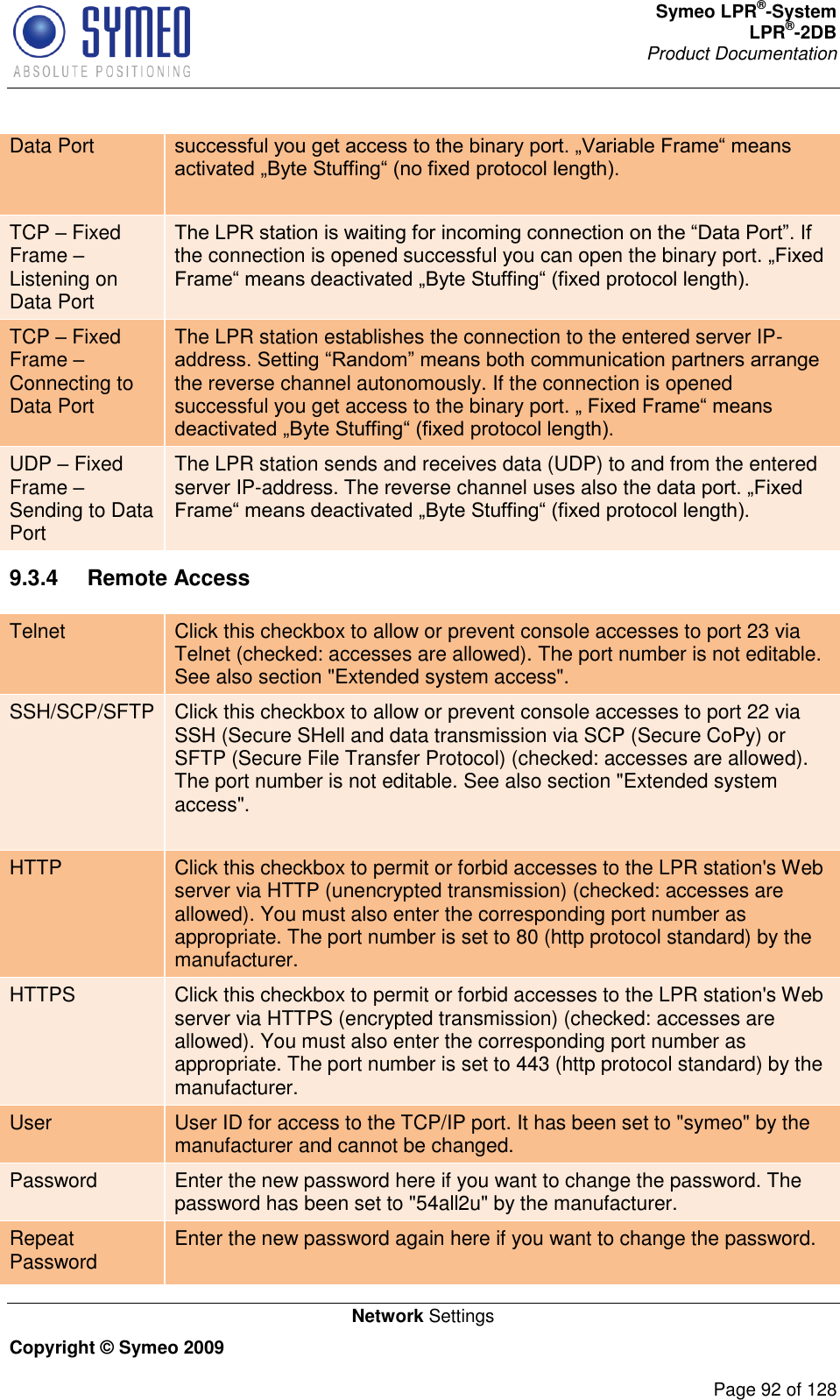
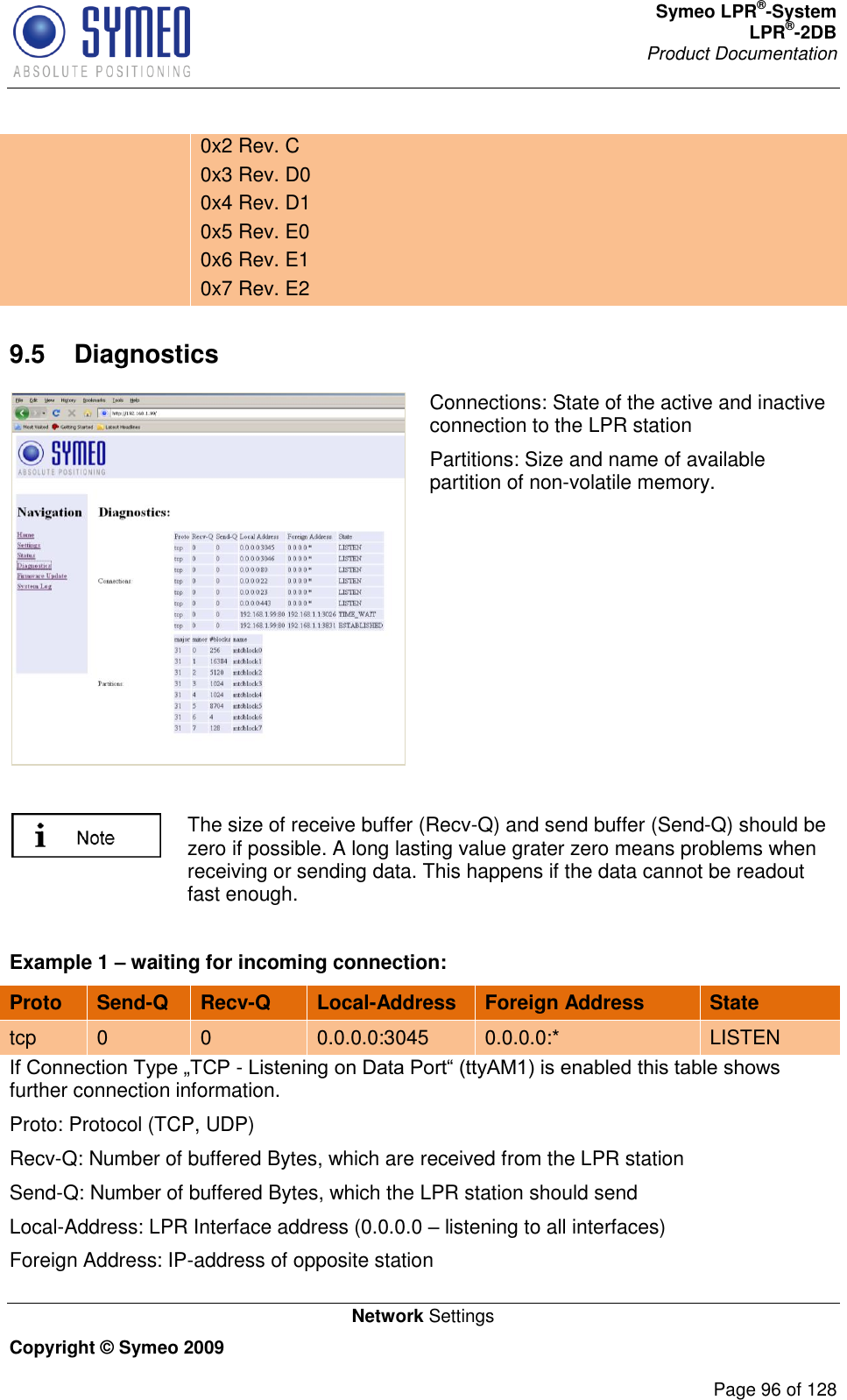
![Symeo LPR®-System LPR®-2DB Product Documentation Coordinate System Copyright © Symeo 2009 Page 47 of 128 z y x [0,0,0] Figure 26 – transponder coordinate system Positions in all four quadrants can be measured in the transponder coordinate system: LPR calculates the 2D position in the plane spanned by x and y. Since it is not always possible to mount all the LPR components (LPR-2DB Integral Station, LPR-2DB Station antennas) in this plane, the deviation of the installation position in "z" relative to this plane must be specified for all LPR components. In plane areas the z-position can be estimated directly towards the ground level. The LPR-2DB Integral Stations must be measured in x-/y- and z-direction. 6.1.2 Reference point of LPR-2DB Integral Station The position of the measuring point is critical for measuring the LPR-2DB Integral Station. The measuring point is marked by matting on the stations housing. In a top view, the measuring point is located at the same level as the antenna patches (horizontal structures, roughly in the middle of the board portion above the copper reflector). In the front view, the zero point is located midway between the copper reflectors. Measurement point Figure 27 – Position of the measuring point on the LPR-2DB Integral Station](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-47.png)
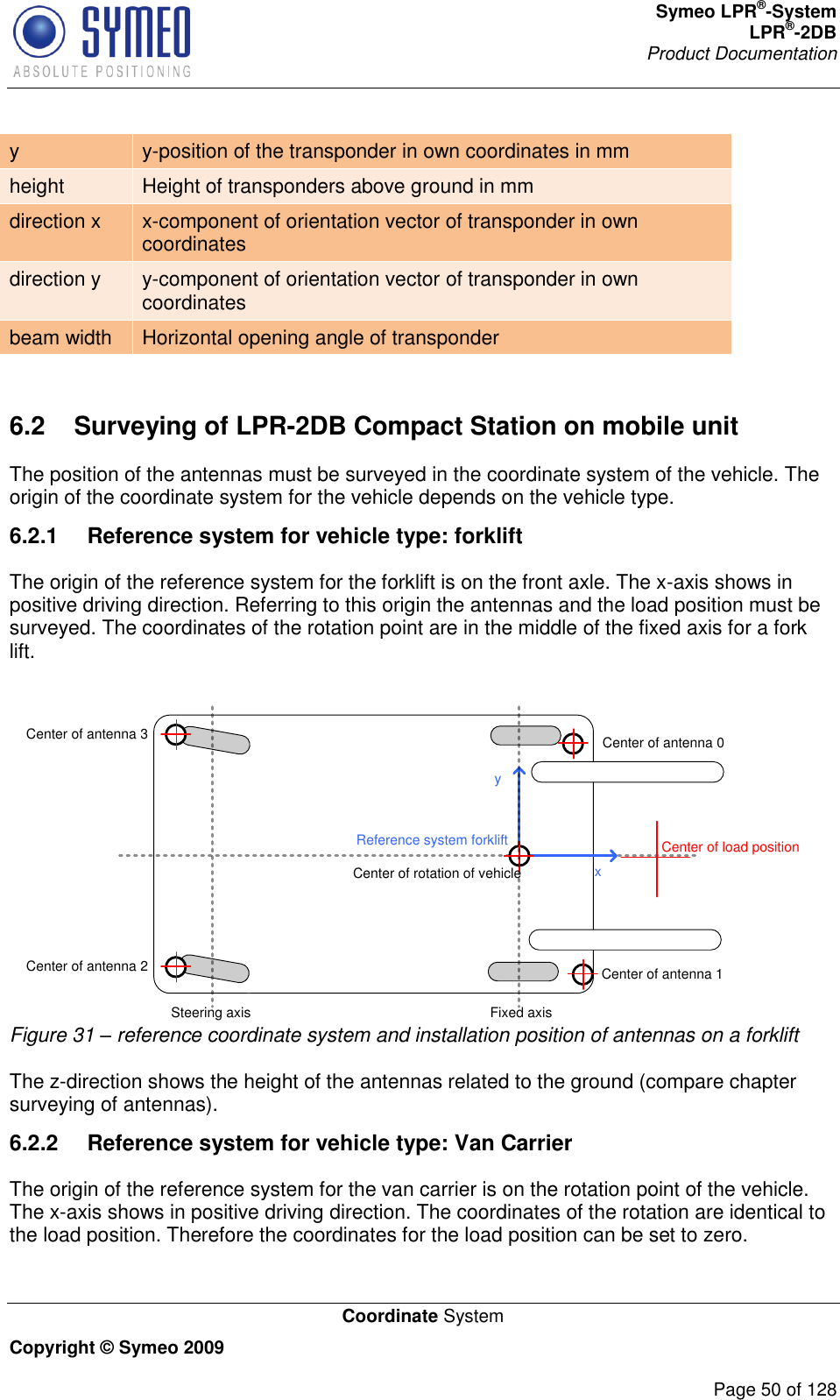
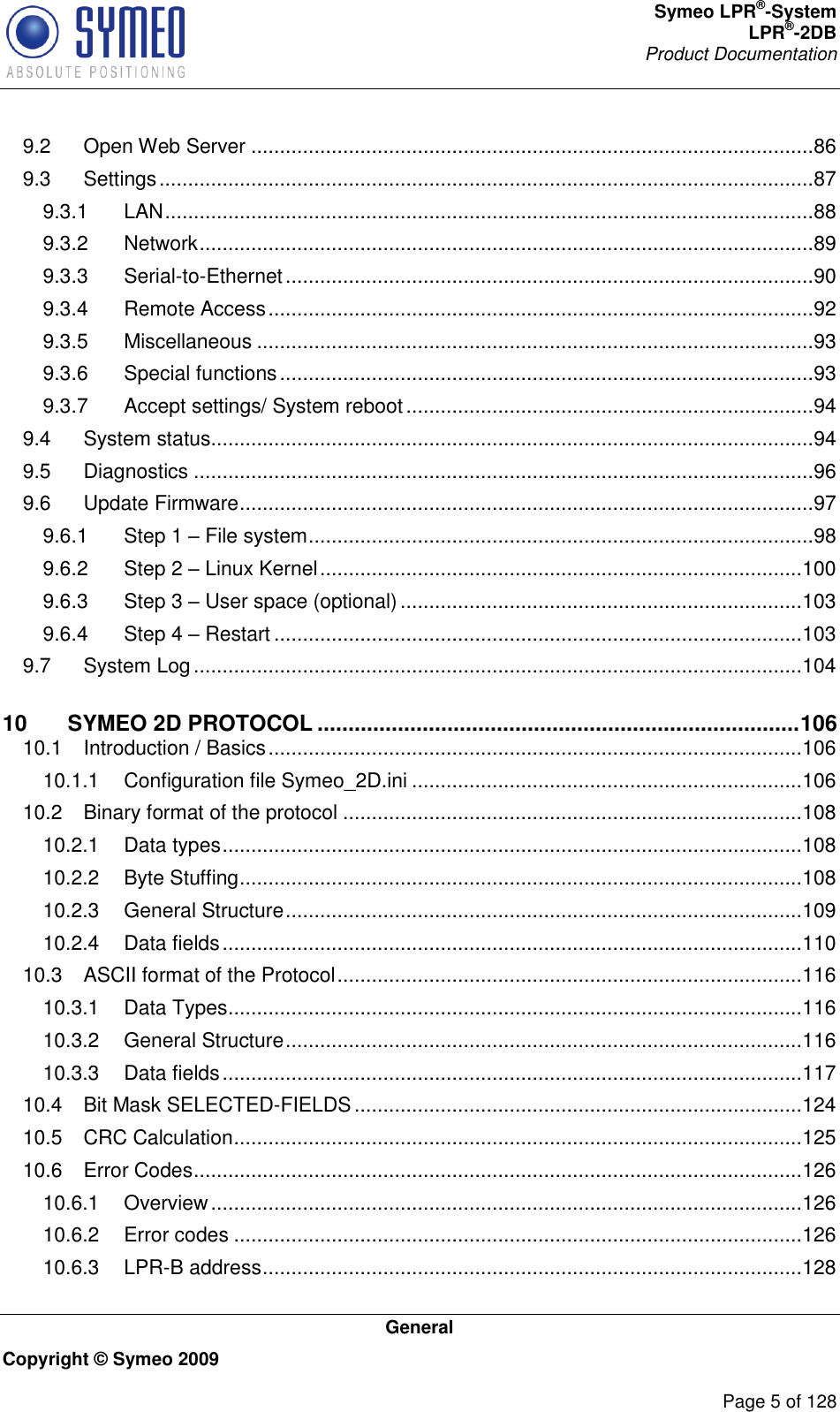
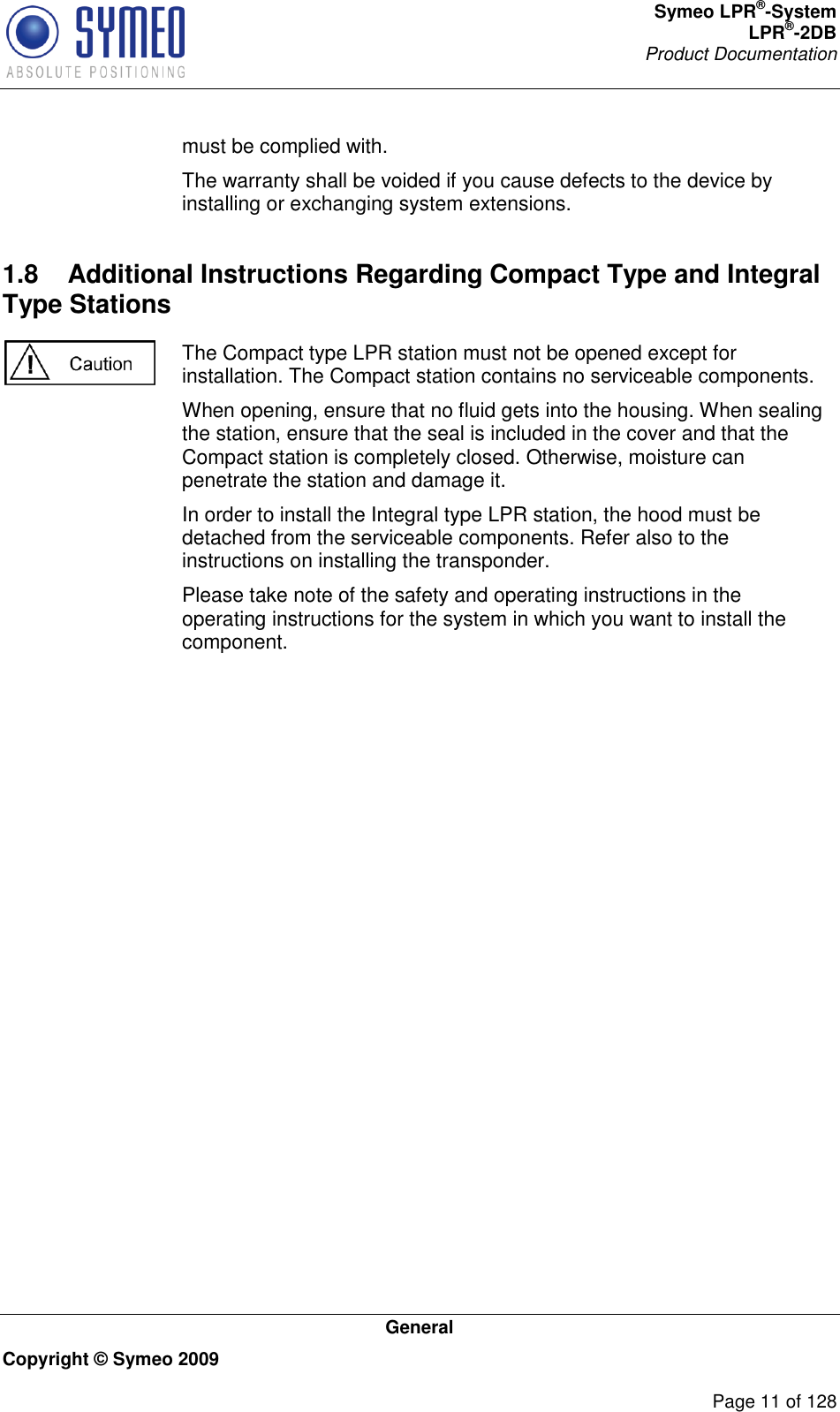
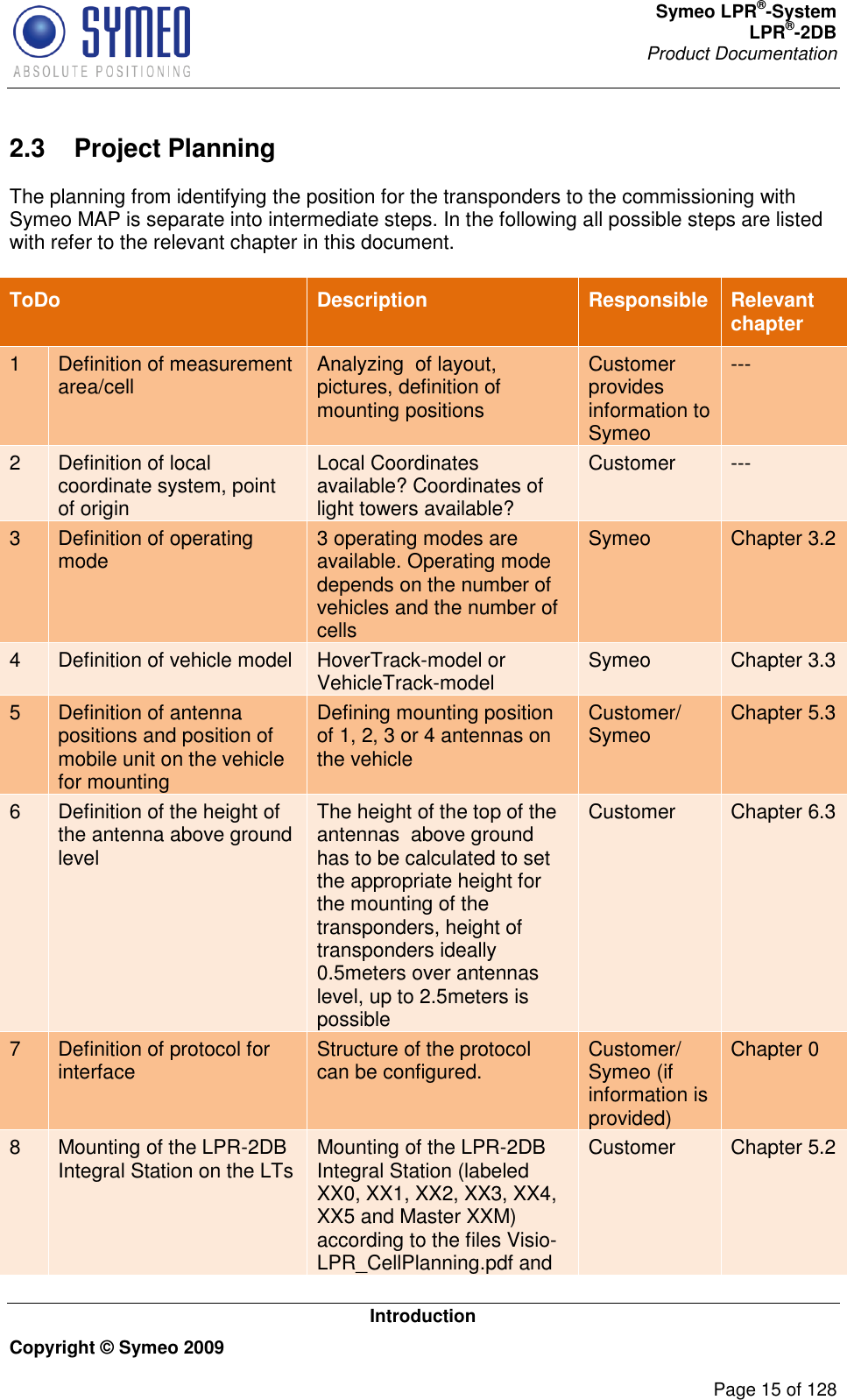
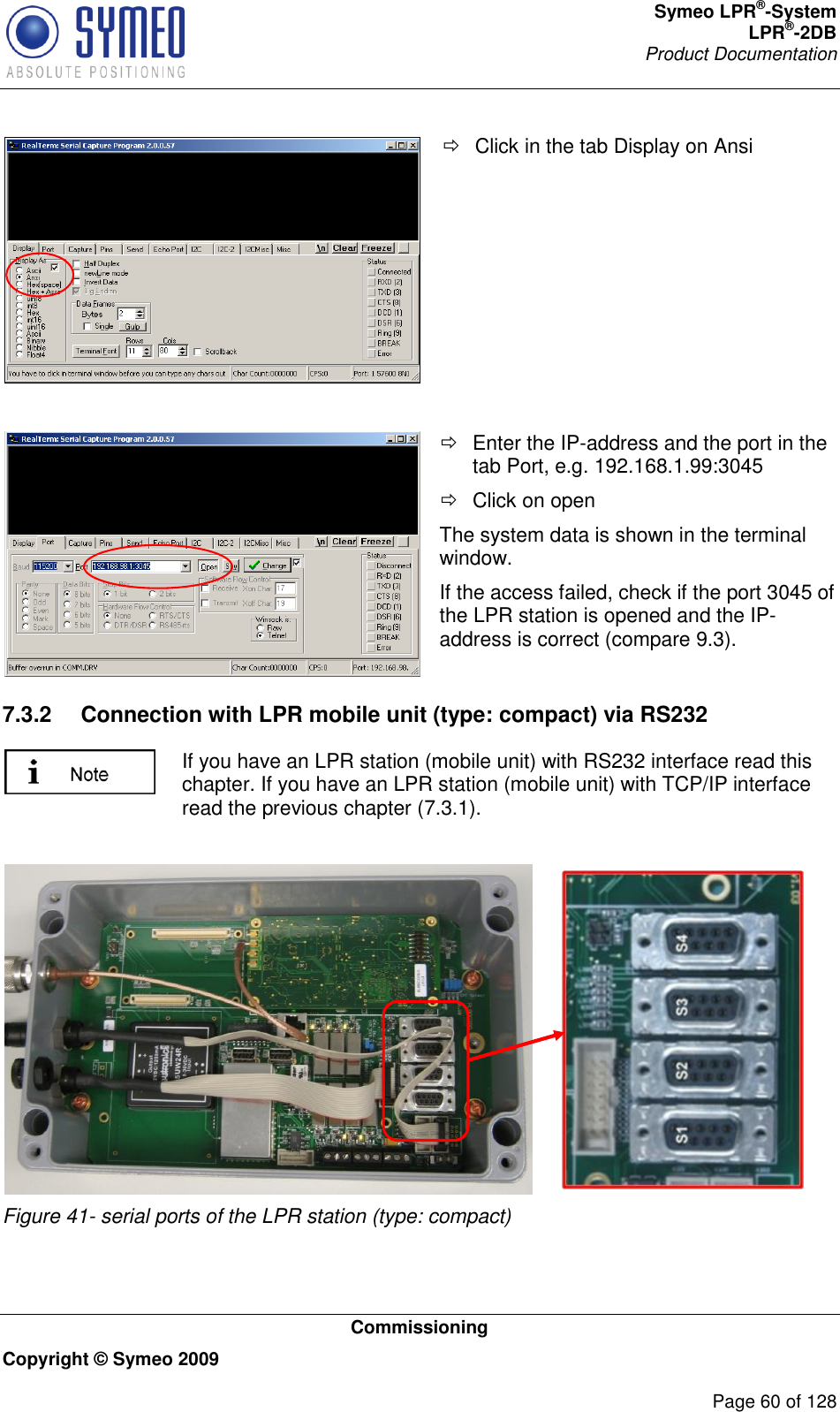
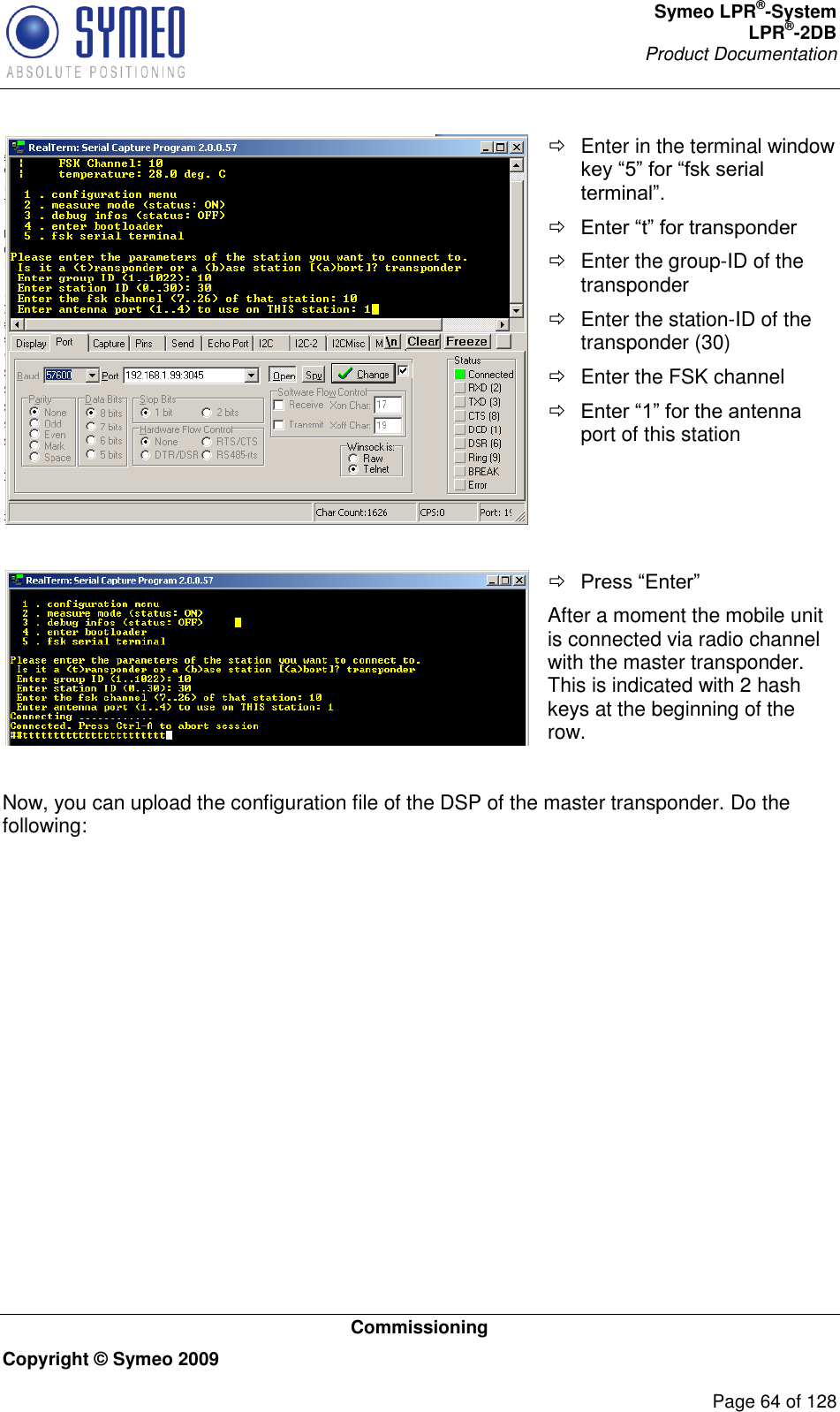
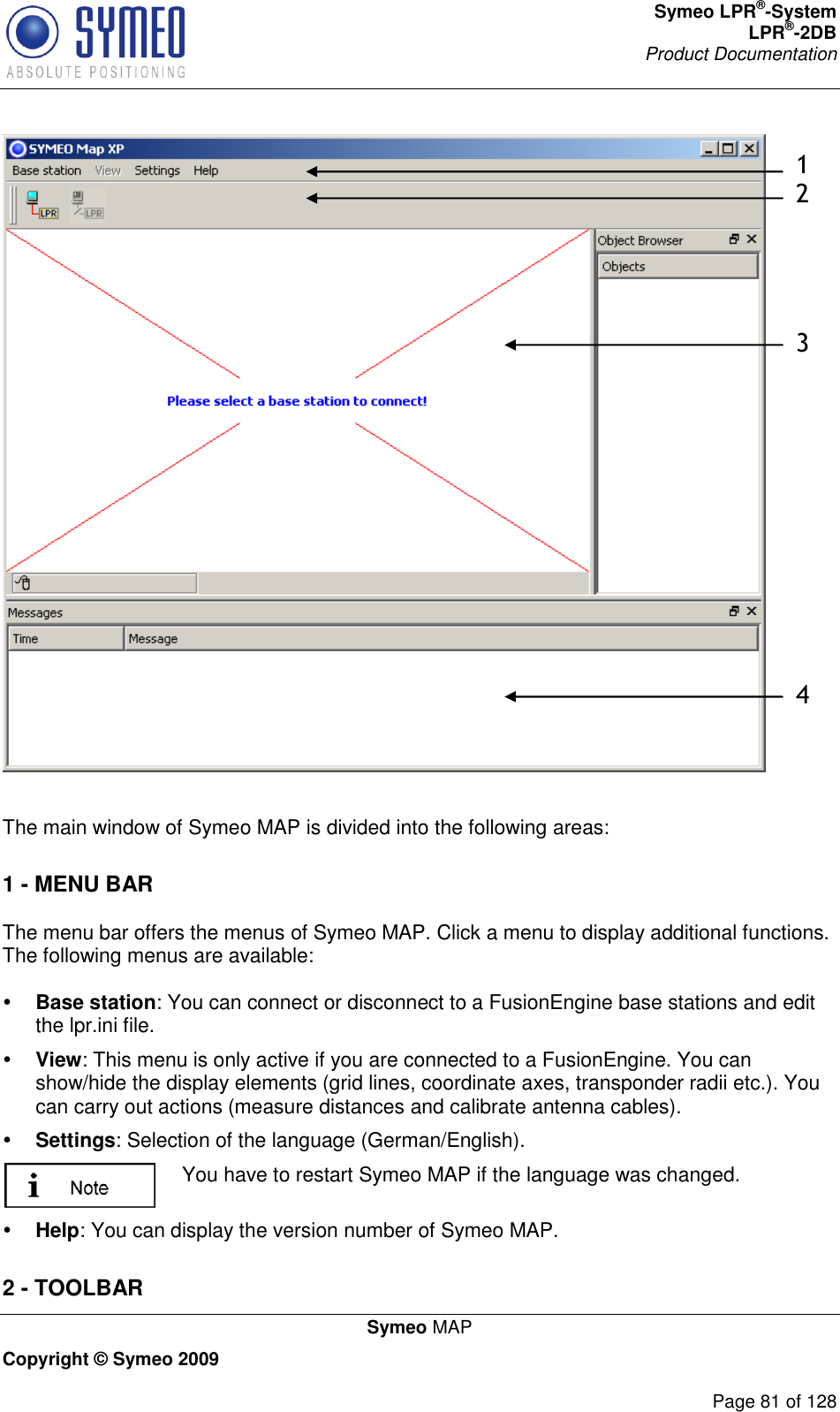
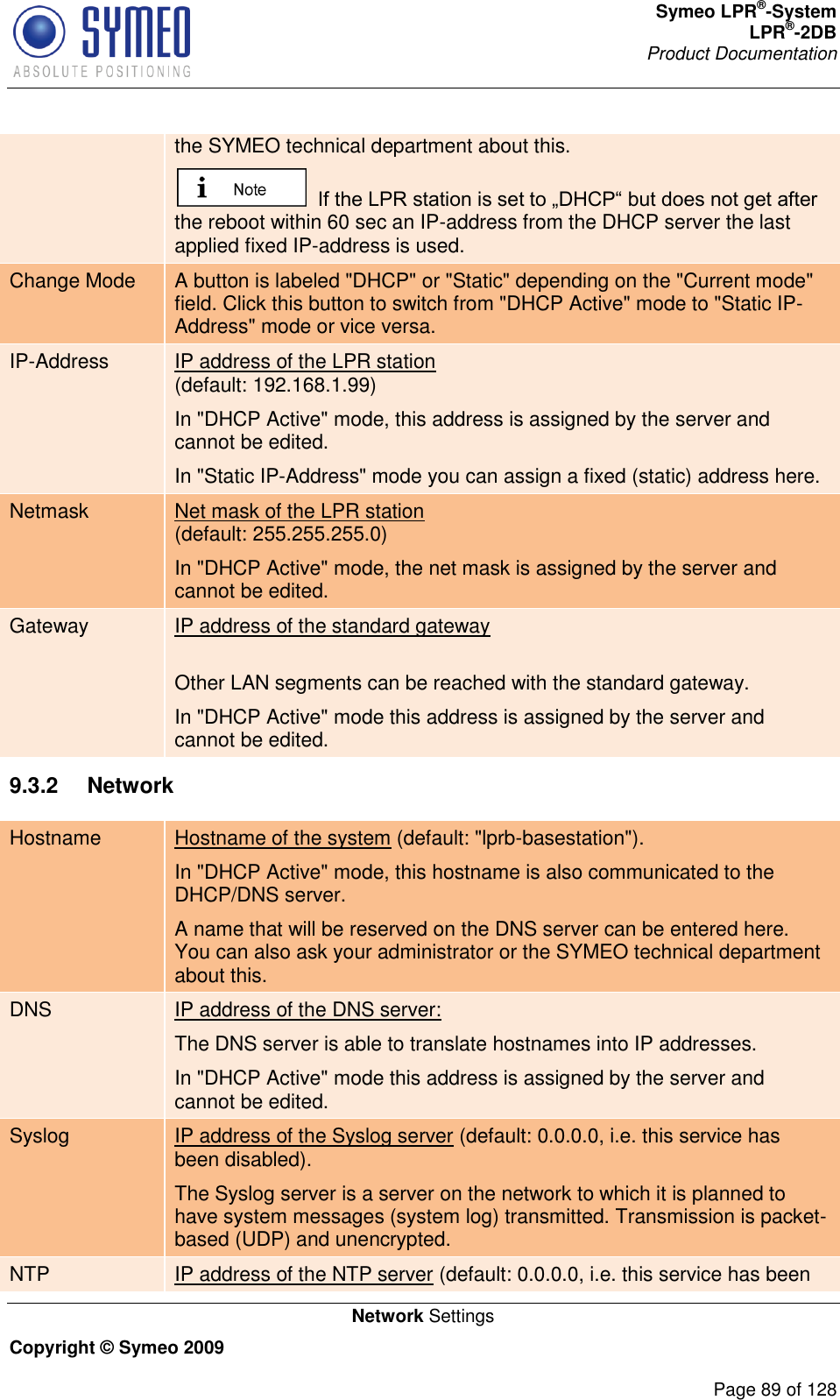
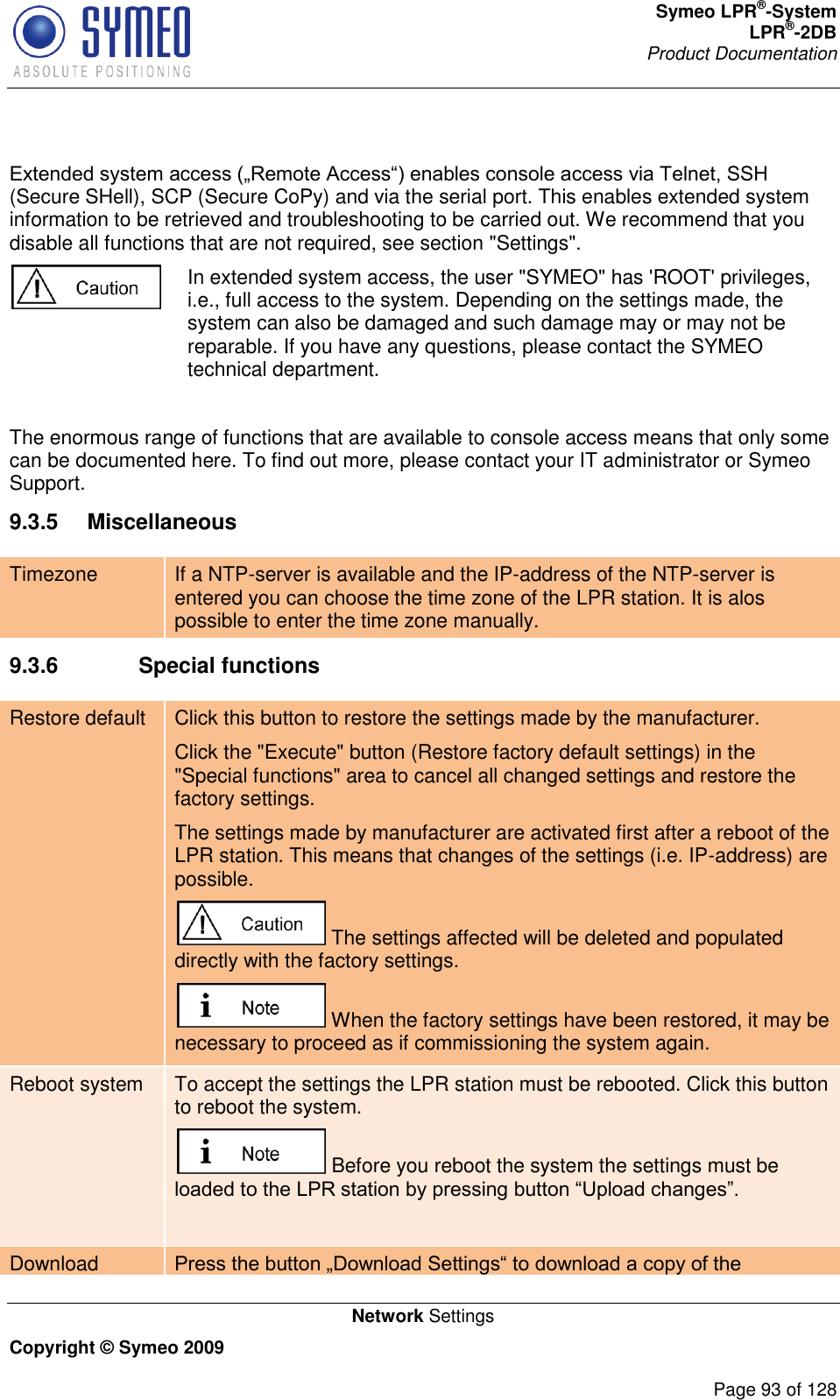
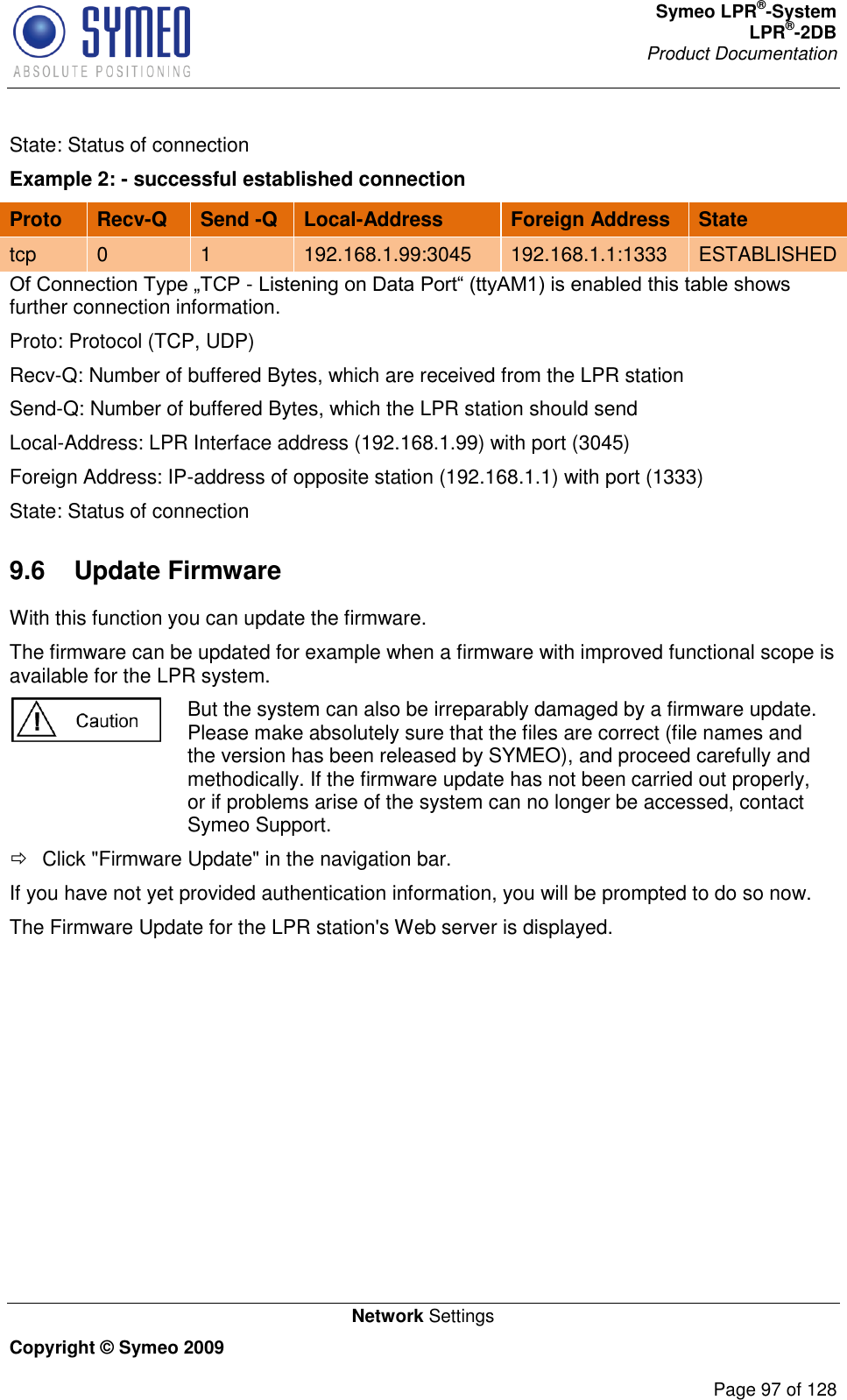
![Symeo LPR®-System LPR®-2DB Product Documentation Coordinate System Copyright © Symeo 2009 Page 53 of 128 Antenna measurement point Figure 35 – measurement point of antenna The reference point of the antenna for surveying is in the middle of rotational solid of the antenna. 6.3.1 Formatting of coordinatesThe position of the antennas must be provided to Symeo in the following EXCEL format (compare Table 2 ). The following values must be entered into the file by the surveyor: Antenna position: Antenna position Port x y Height (0) 2.576 3.456 12.300 (1) 1.000 2.876 12.345 (2) -2.123 -1.200 12.816 (3) 3.378 4.503 12.461 Load position [Load Position] Table 2 – Antenna position Description Meaning](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-53.png)
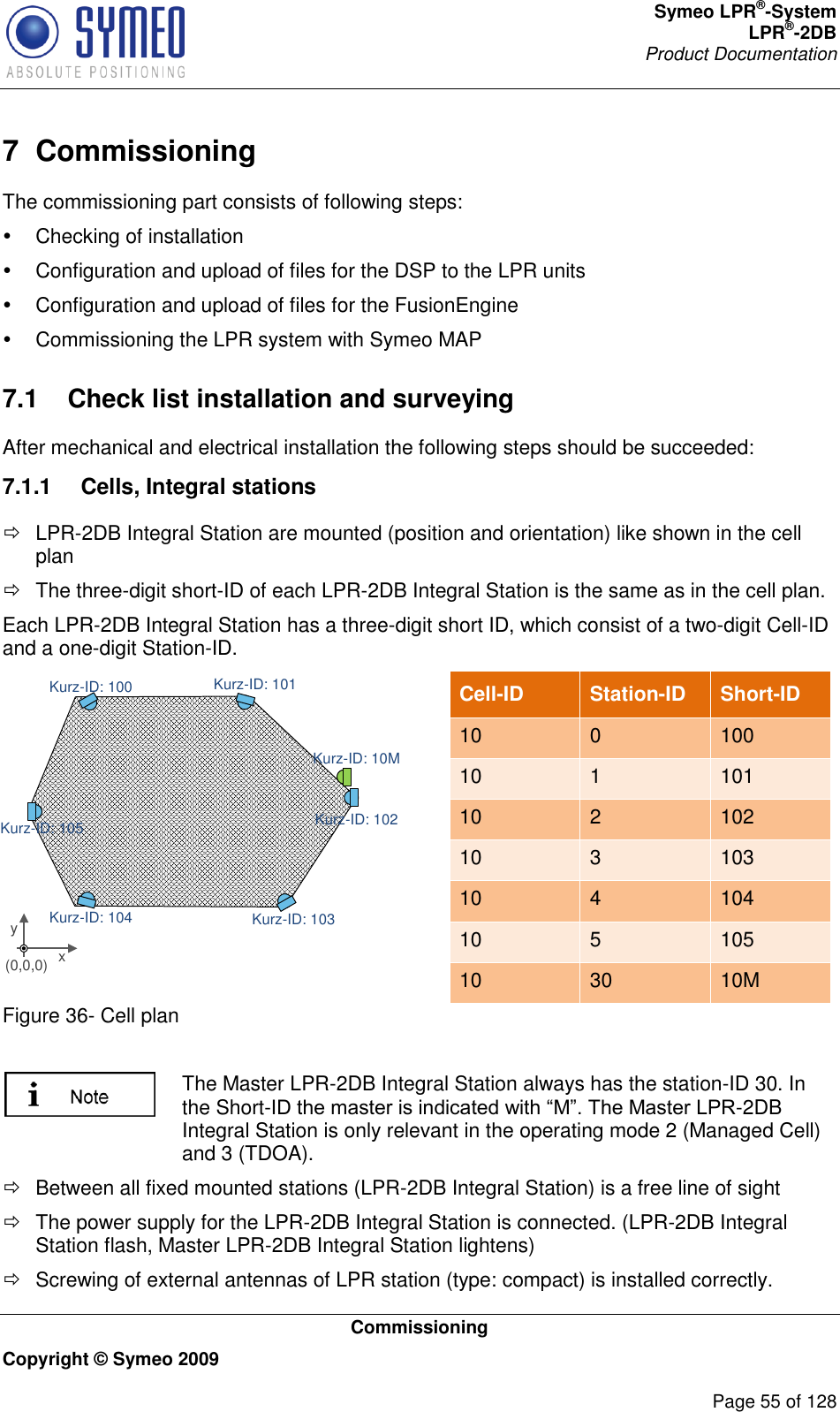
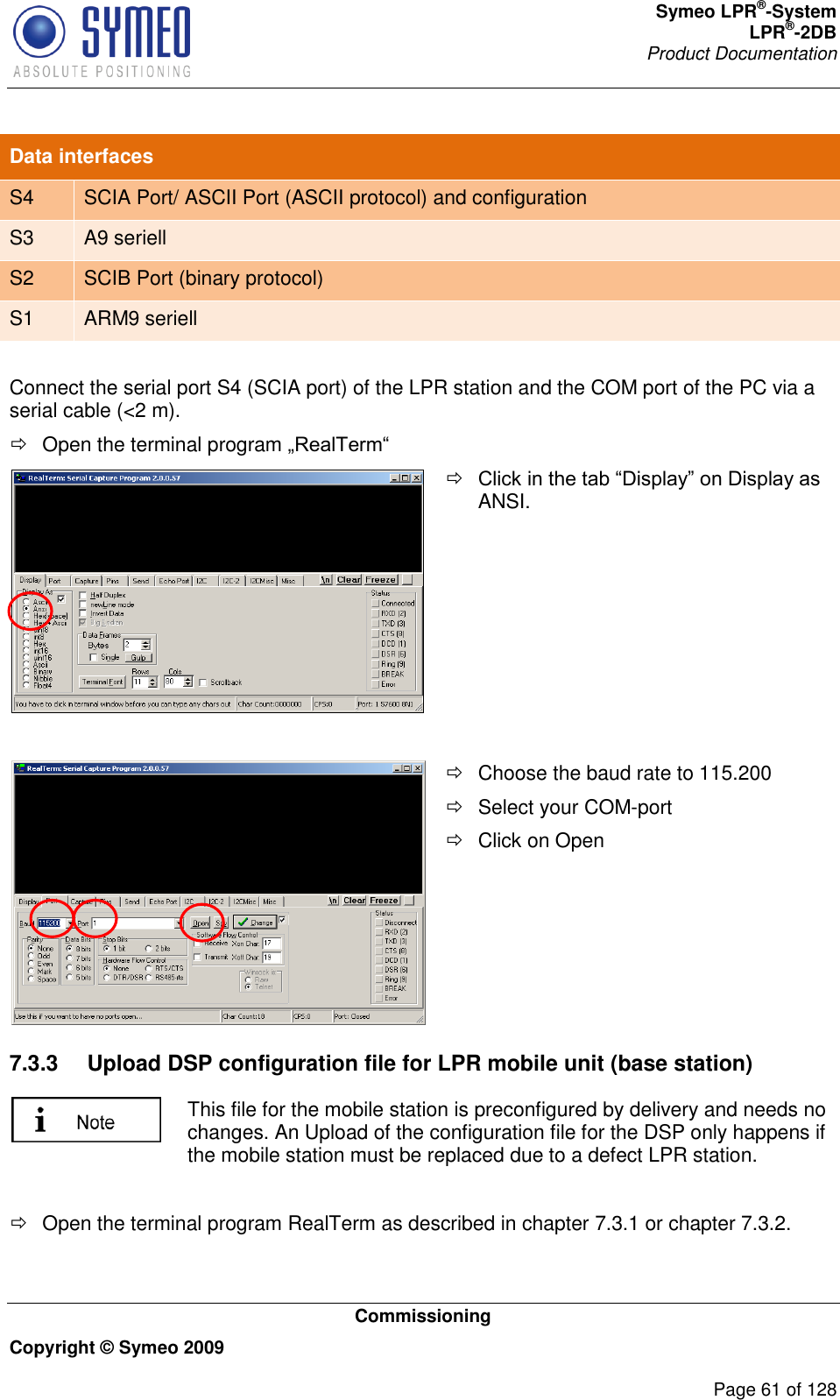
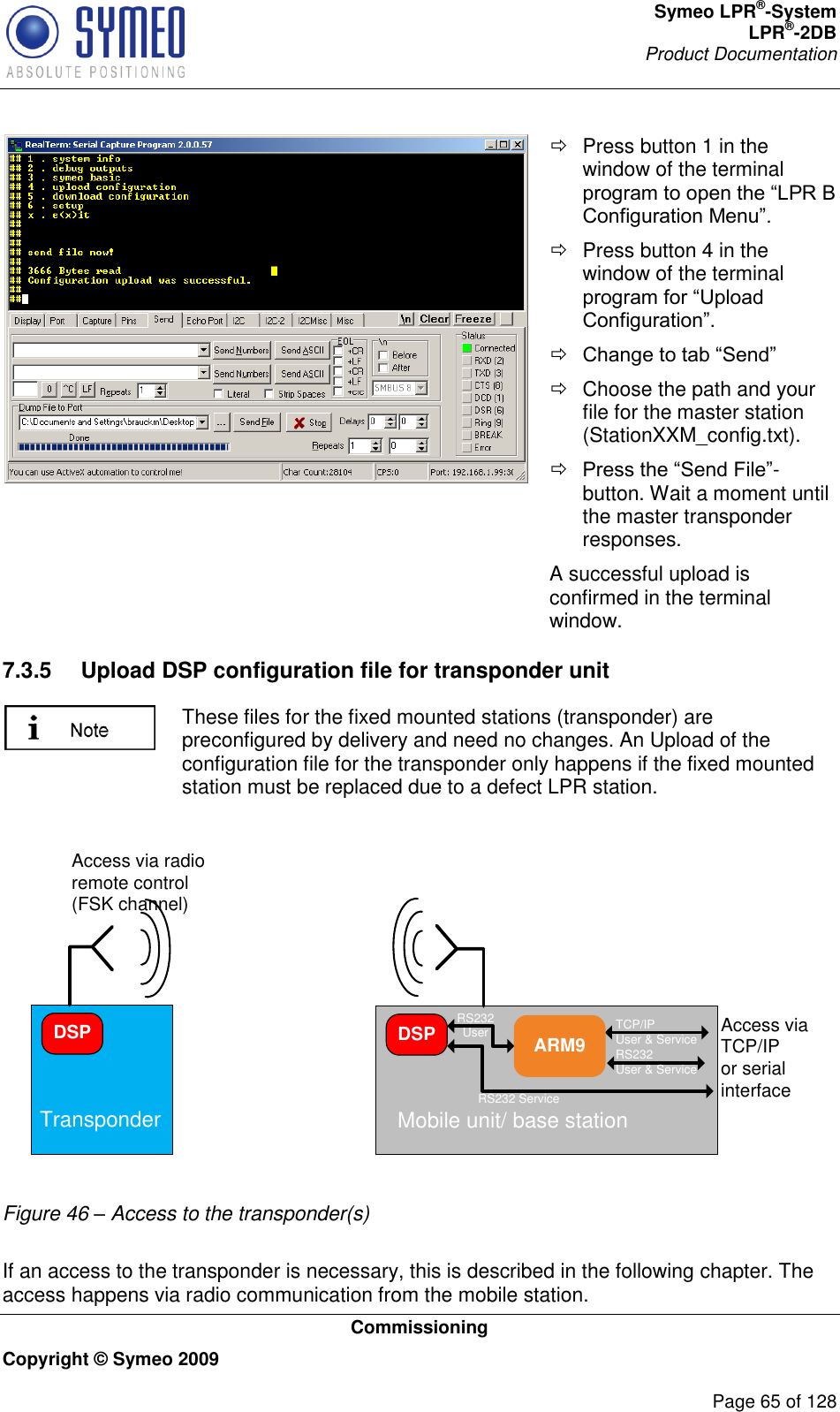
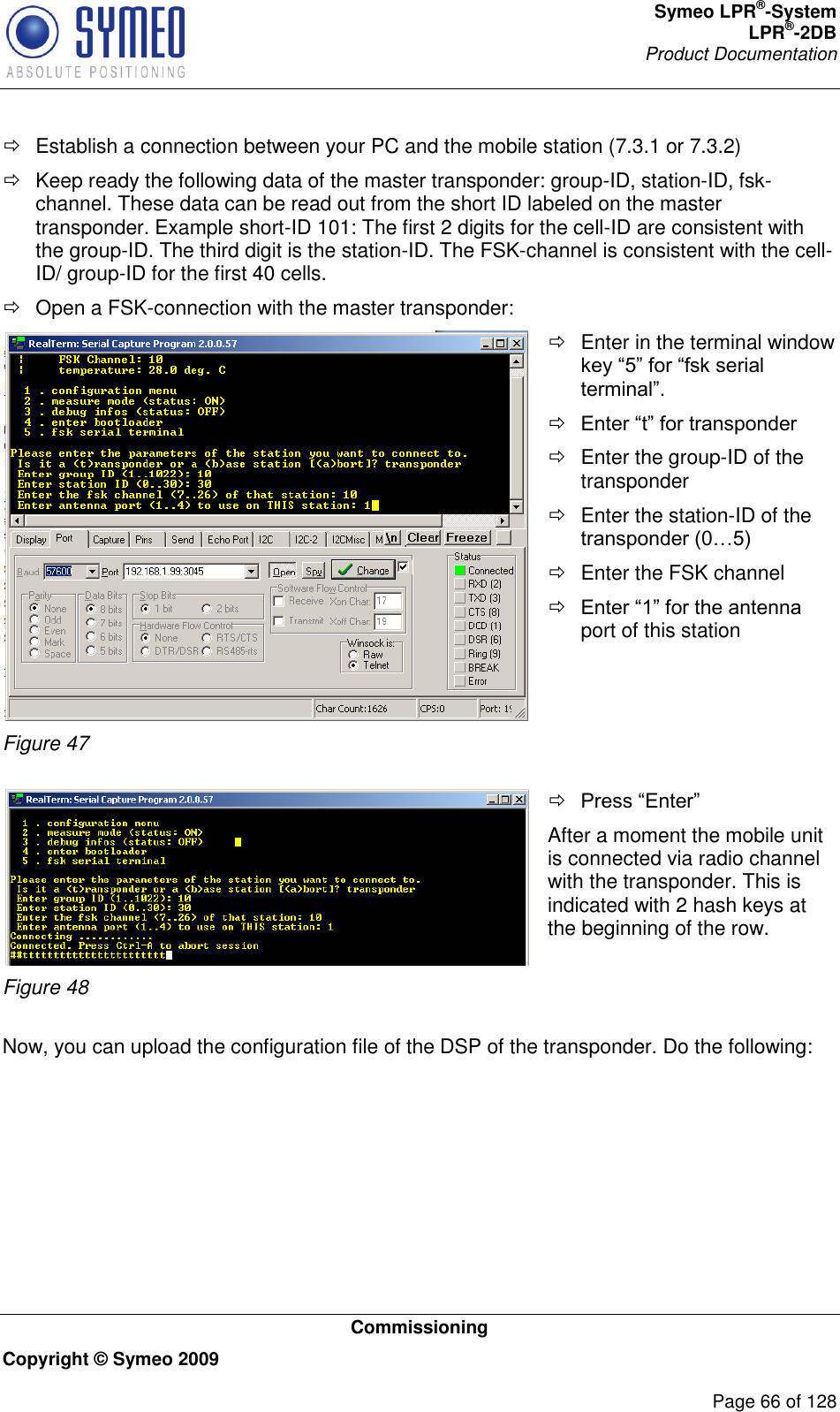
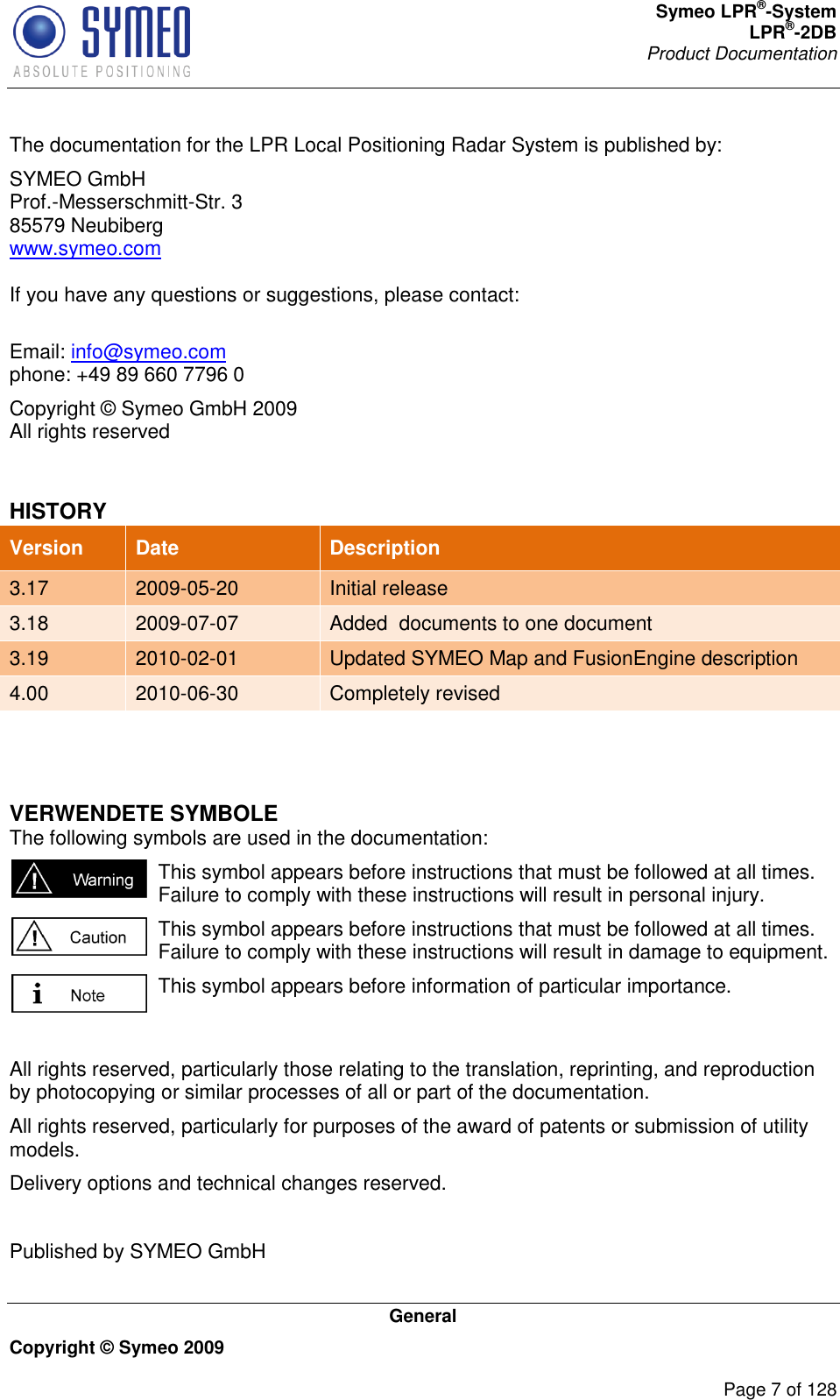
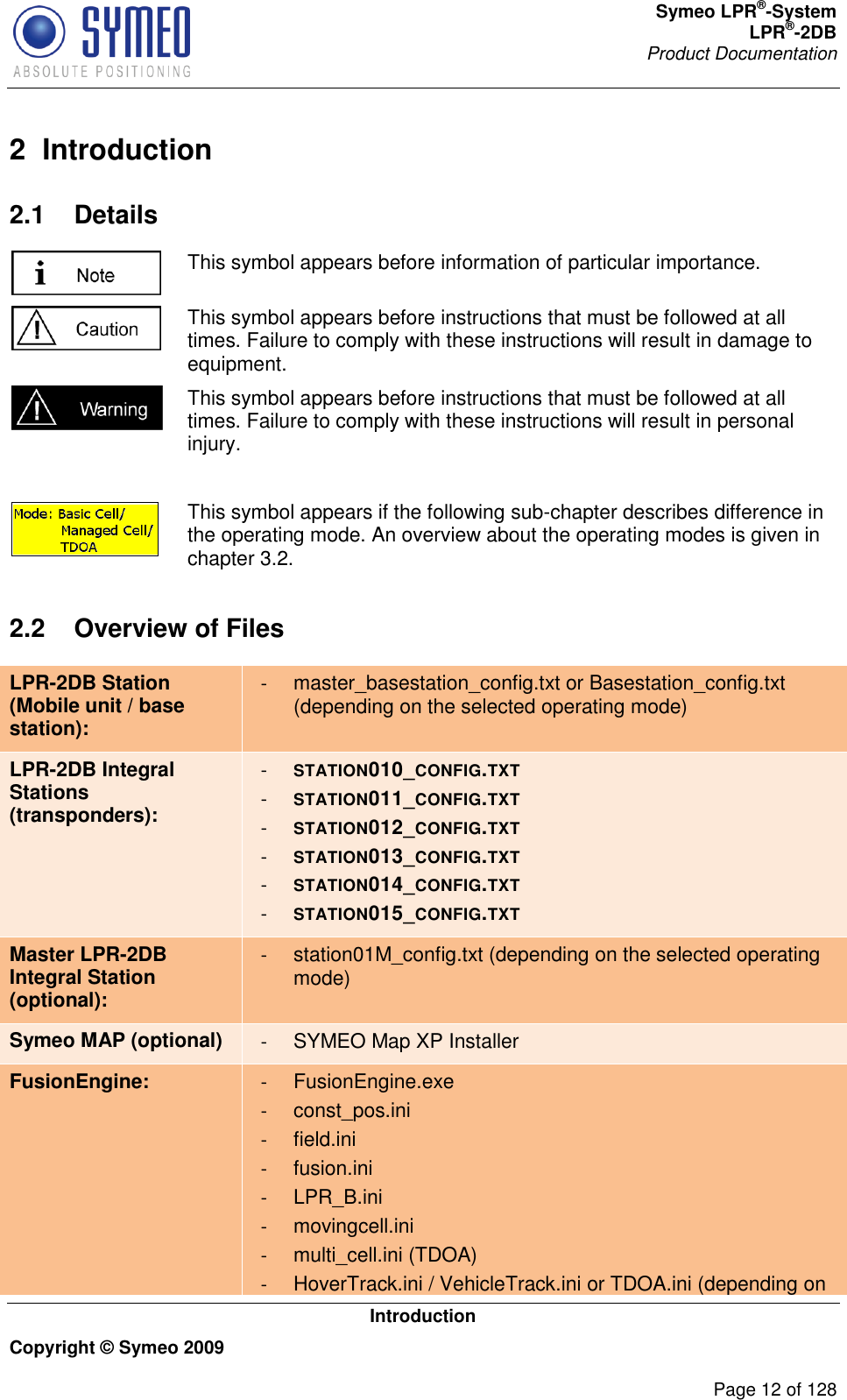
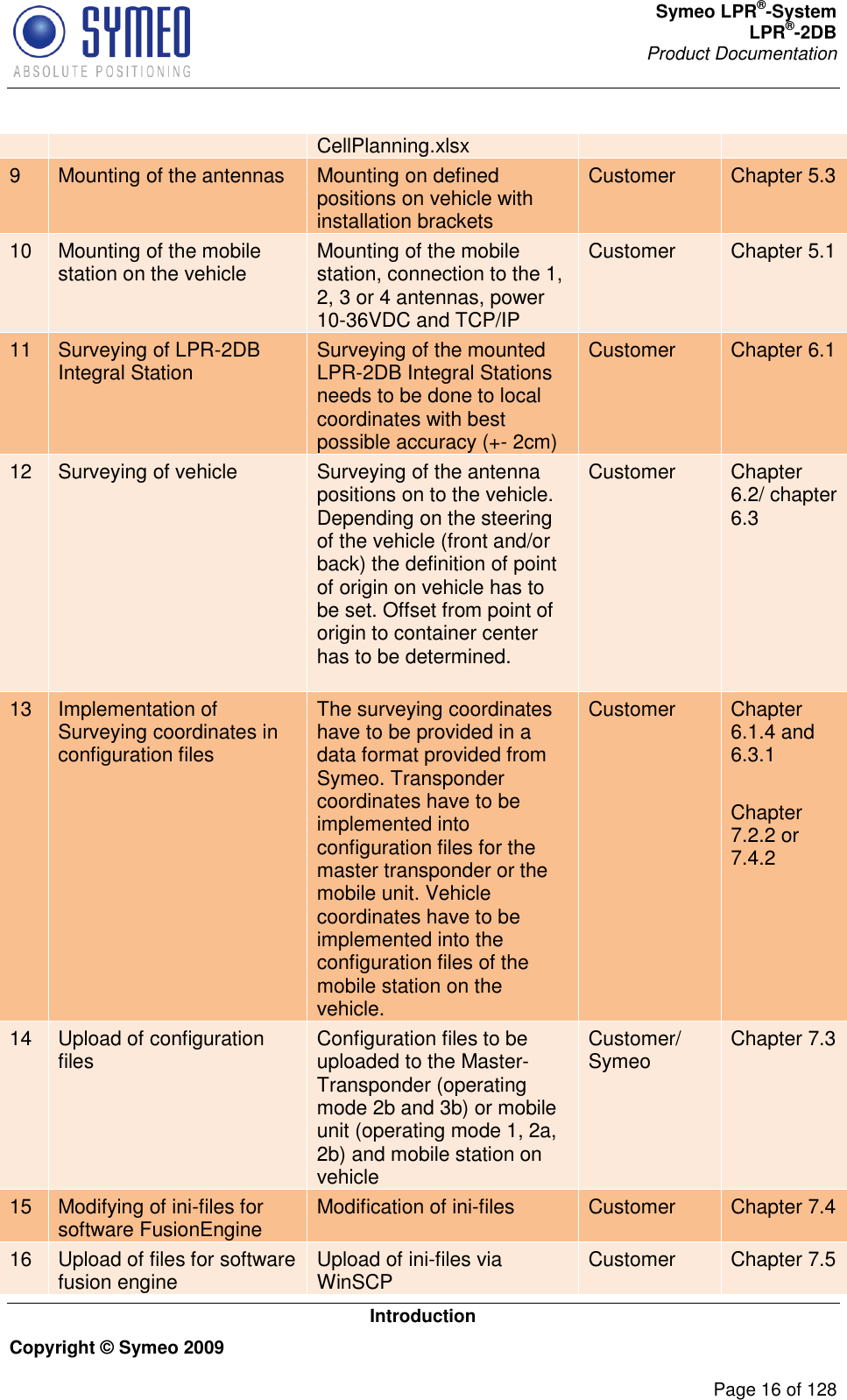
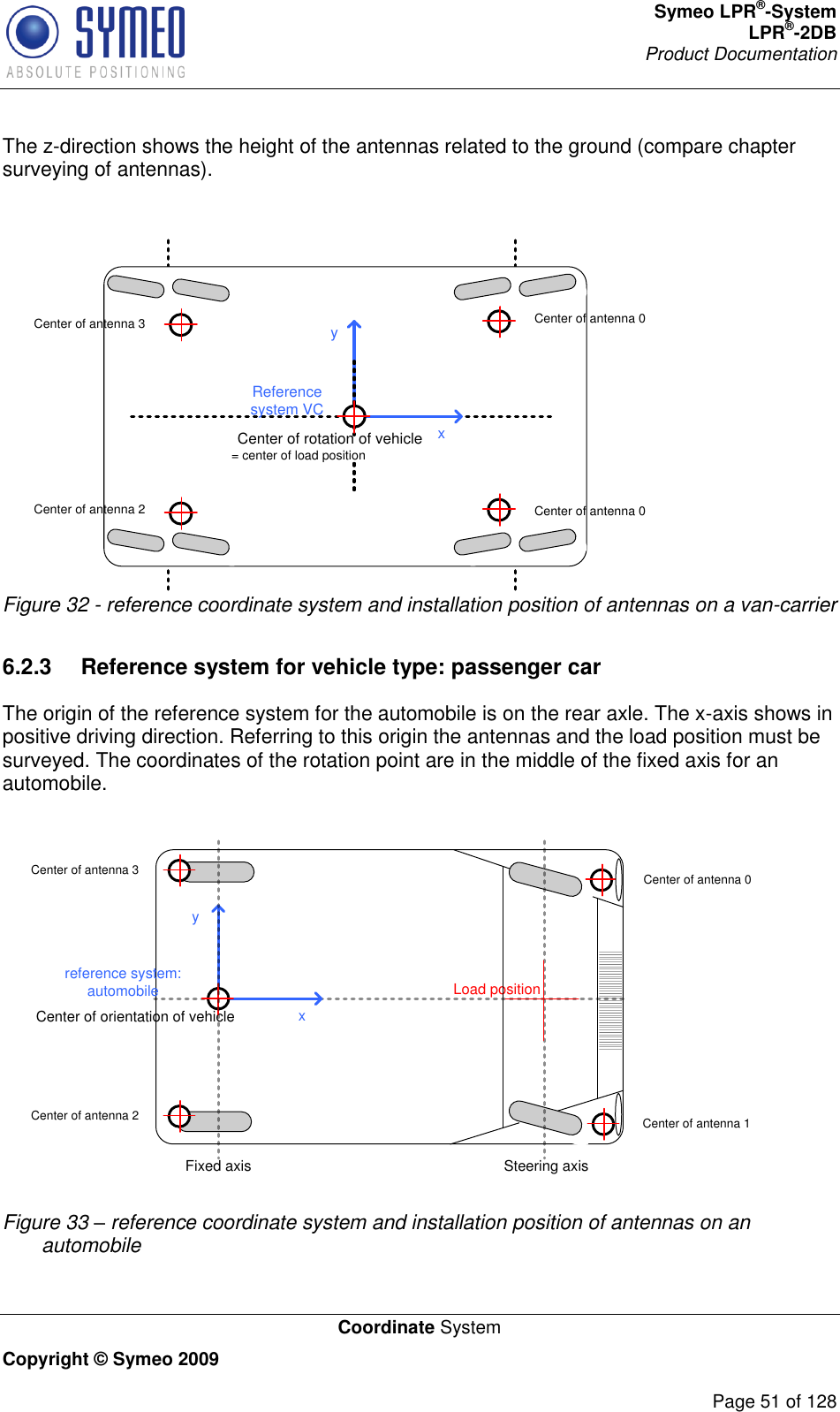
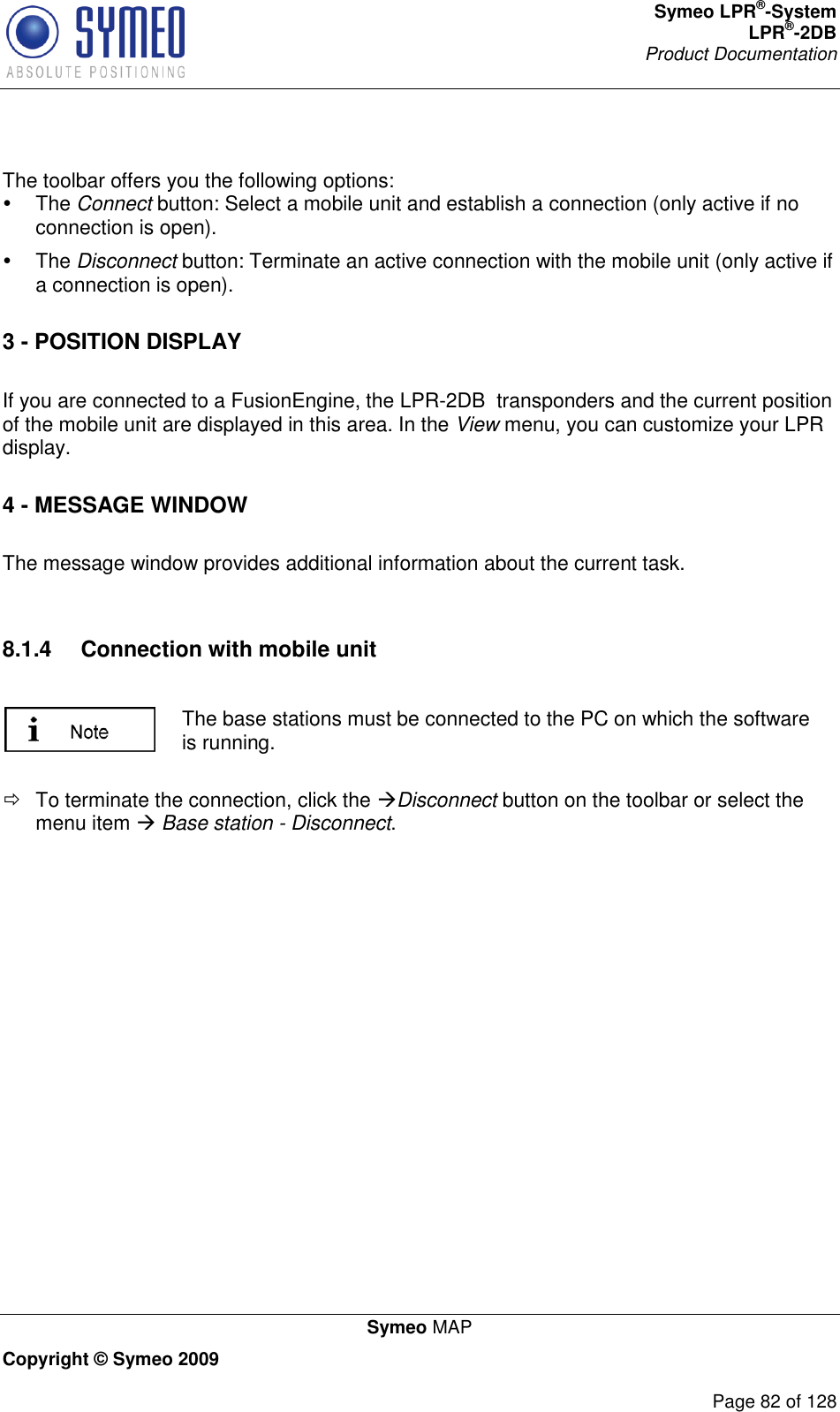
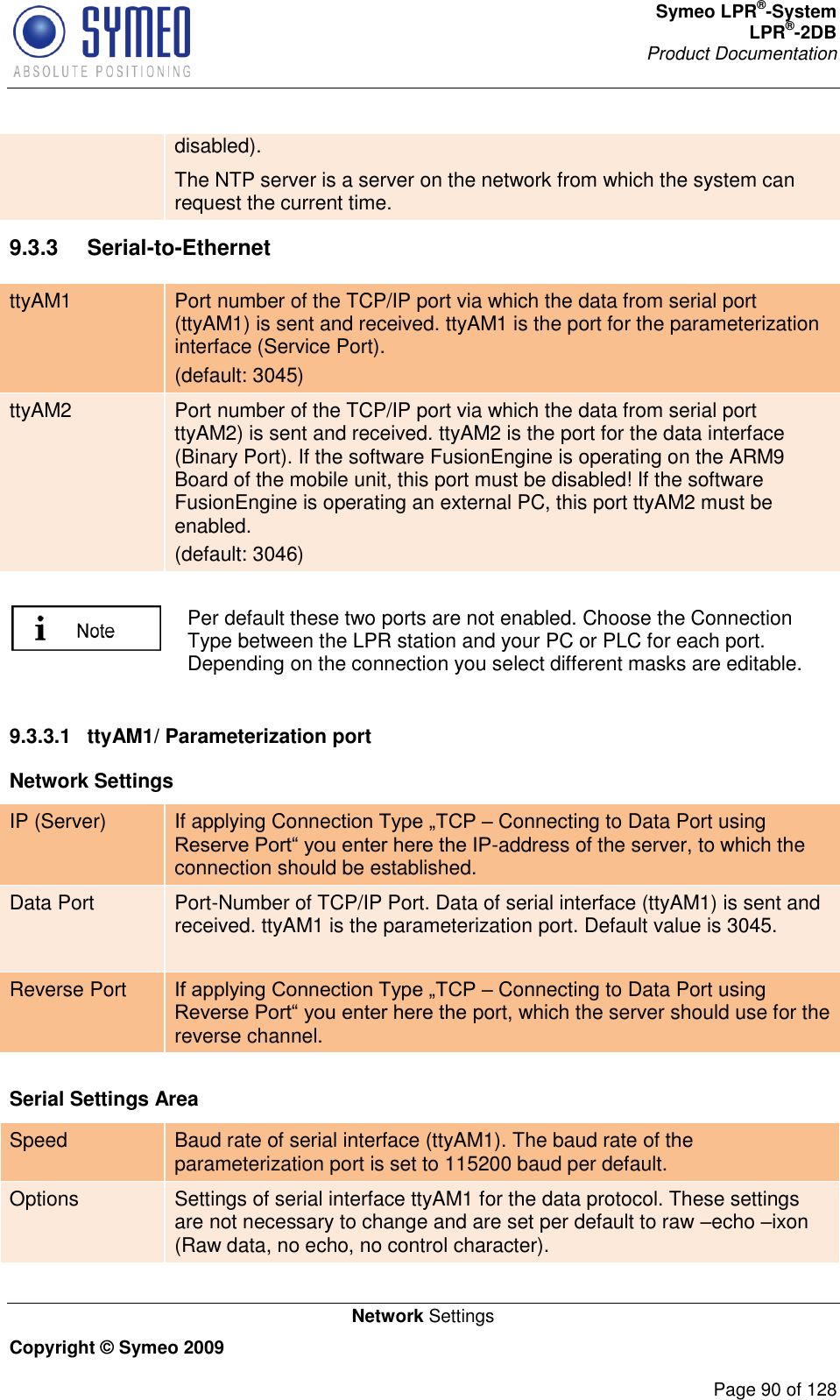
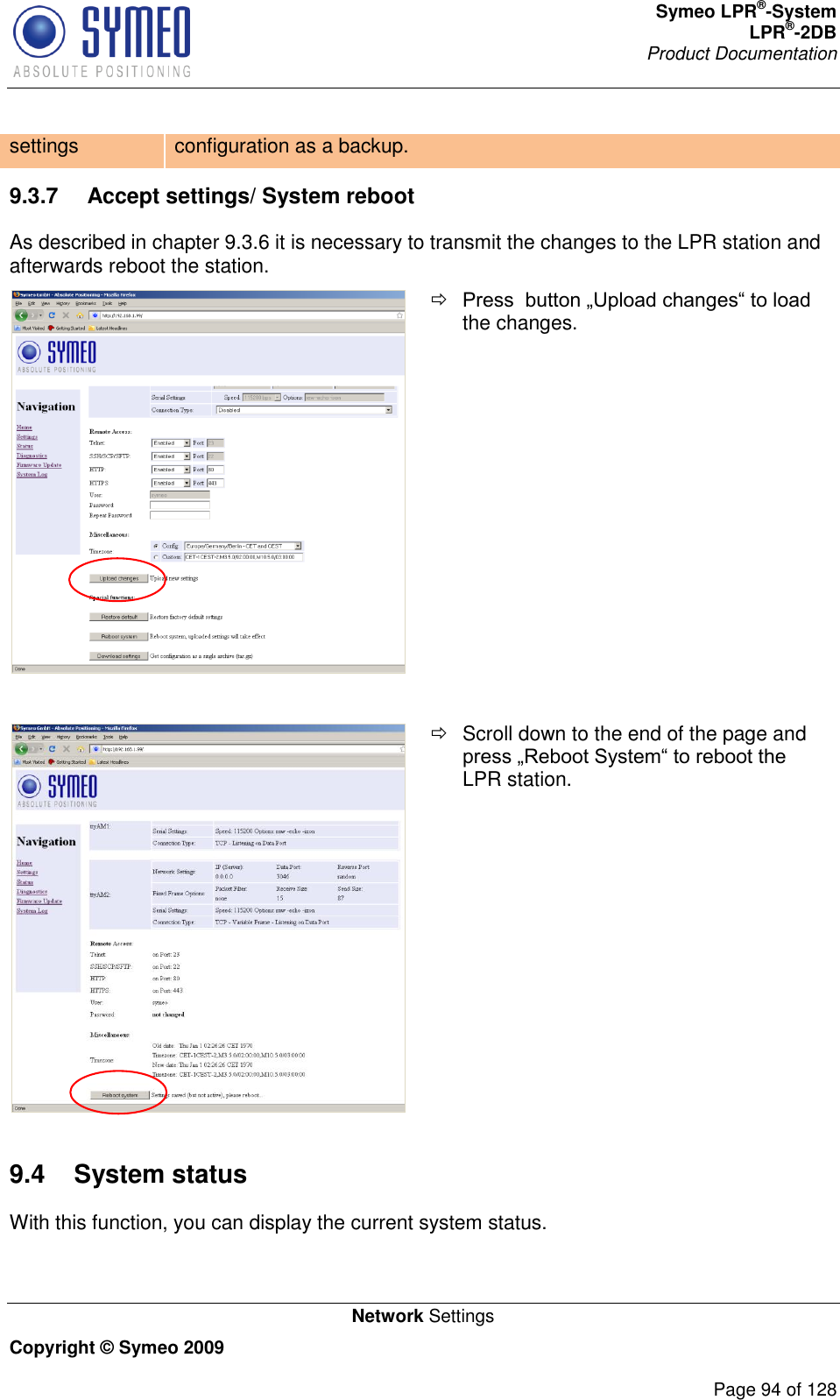
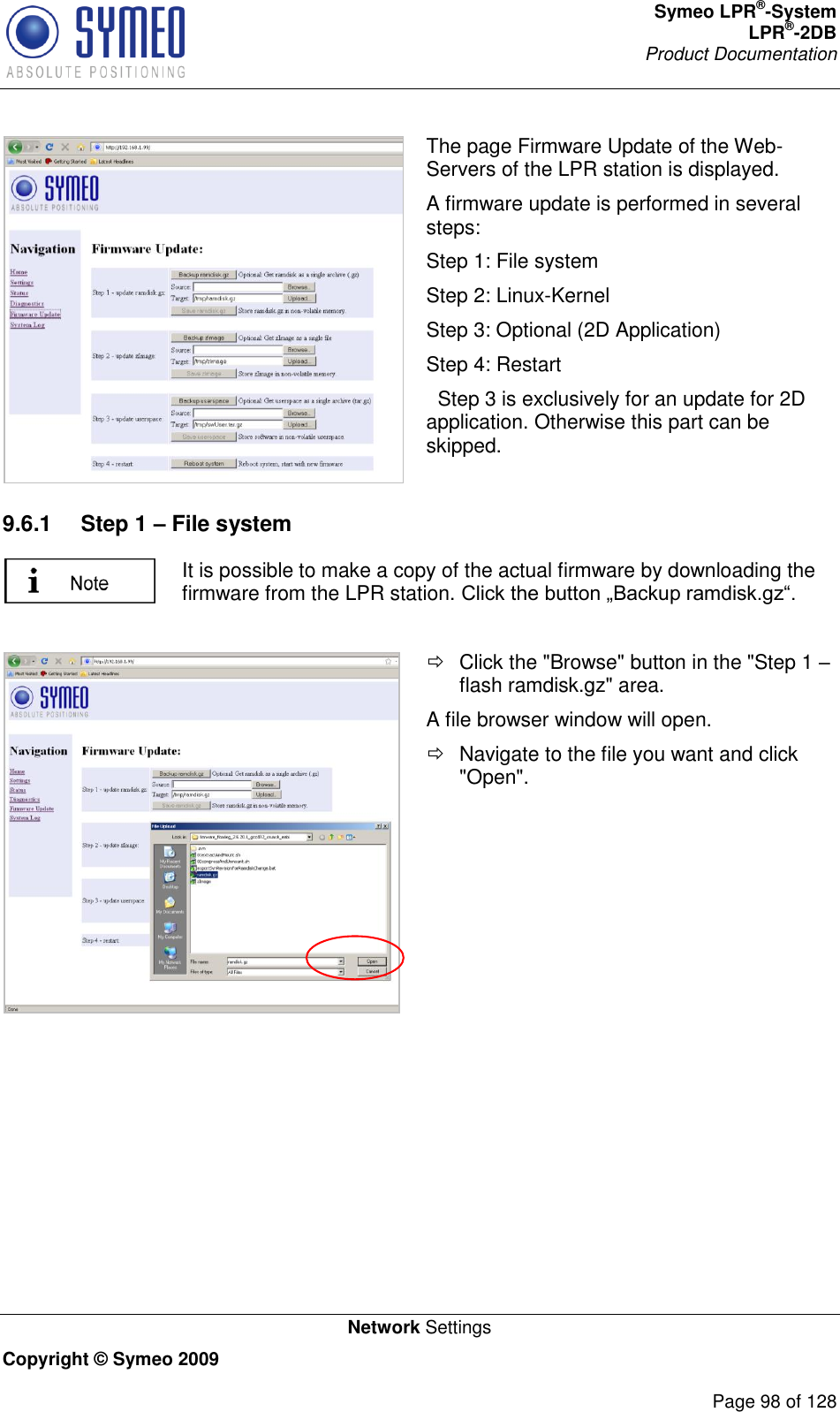
![Symeo LPR®-System LPR®-2DB Product Documentation Commissioning Copyright © Symeo 2009 Page 68 of 128 LoadPos.ini Load position (in vehicle coordinates). Customer.ini or Symeo_2D.ini Configuration of customer interface (Symeo 2D protocol) all other files No changes 7.4.1 fusion.ini This file contains all connection settings and some general settings of the software FusionEngine. Figure 50 – fusion.ini (example) [MeasurePath] The path where the FusionEngine recordings (measurements) are saved. Must only be changed if FusionEngine is running on extern PC. [COM_LPR] or [COM_LPR_1] and [COM_LPR_2] The physical ports (e.g. 1 for COM-Port 1) of the connected LPR-B stations. Must only be changed if FusionEngine is running on extern PC. [Symeo2D_Port] The TCP listening port for the customer interface (SYMEO 2D protocol), default: port 1234.](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-68.png)
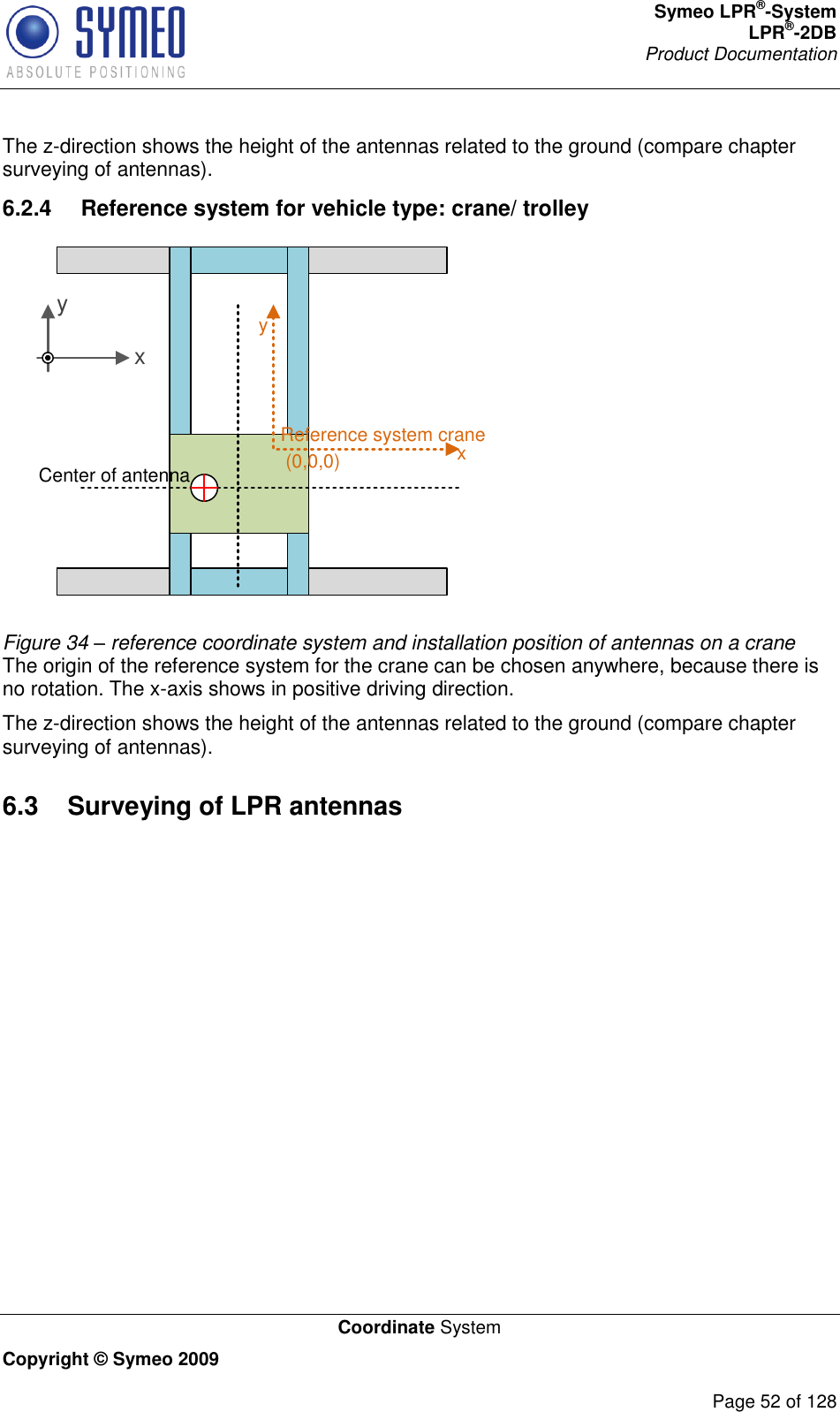
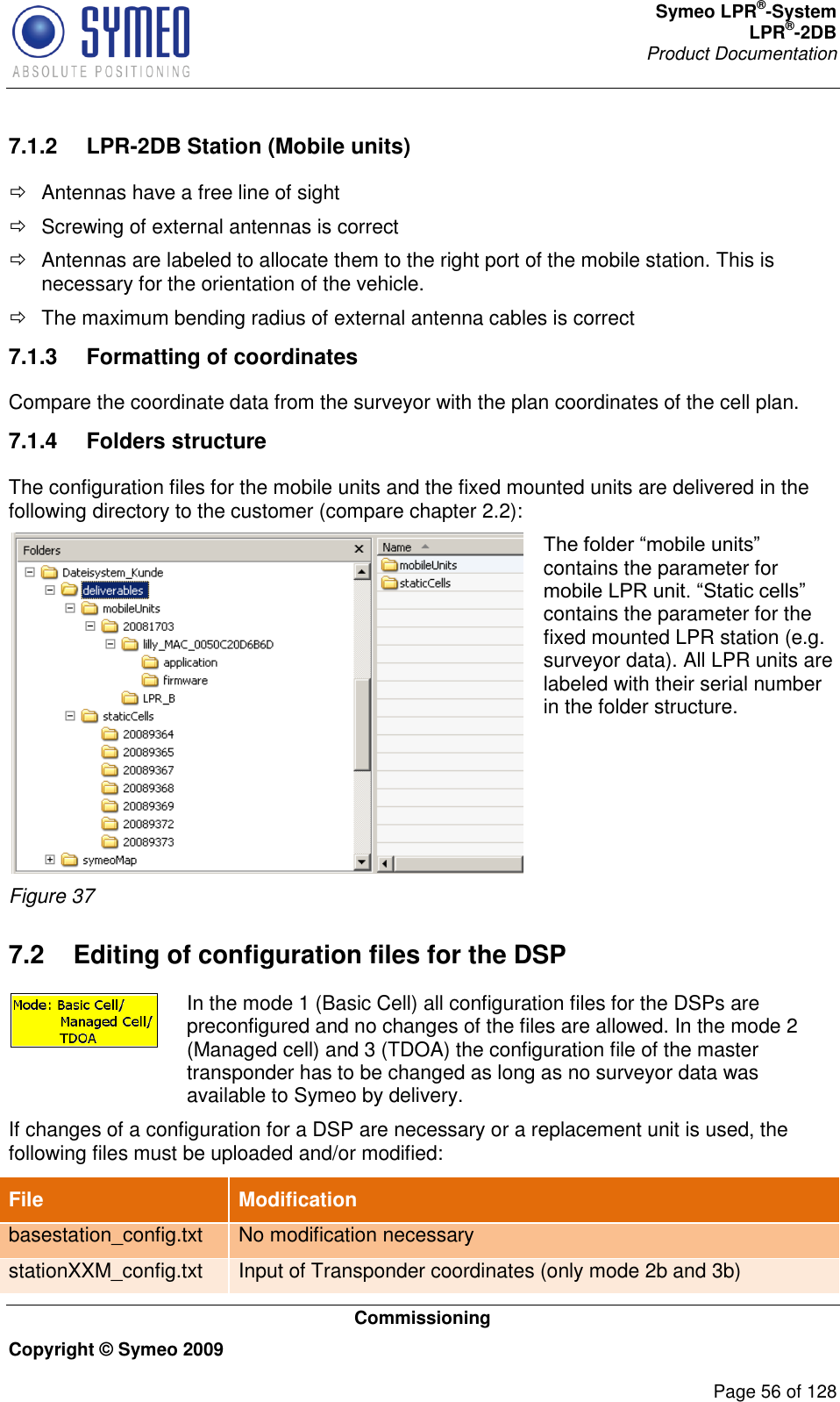
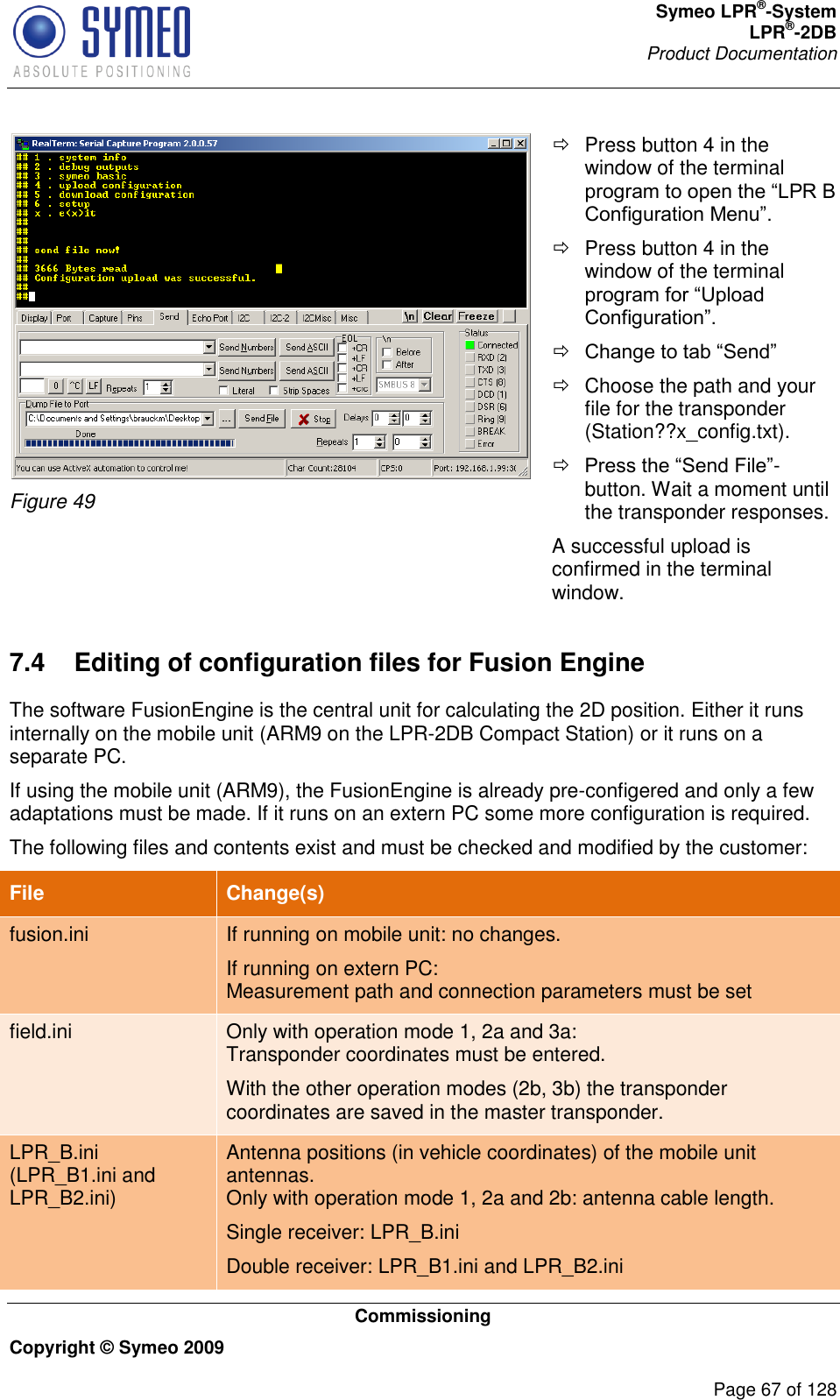
![Symeo LPR®-System LPR®-2DB Product Documentation Commissioning Copyright © Symeo 2009 Page 69 of 128 7.4.2 field.ini This file contains the transponder coordinates (coordinates of mounted integral stations), if using operation mode 1, 2a or 3a. If using operation mode 2b or 3b the transponder coordinates are saved in the master transponder. Figure 51 – field.ini (example) The transponder coordinates is only be done in mode 1 (Basic Cell), mode 2a (Managed Cell) and mode 3a (TDOA). In mode 2b (Managed Cell) and 3b (TDOA) the coordinates are entered directly in the file for the DSP of the master transponder (compare chapter 7.2.2 - file {cell_1} Every LPR-2DB cell is identified with {cell_#}, where # is the number of the cell. [Coordinates] The coordinates (x, y, z) of every transponder of this cell. The columns have the following meaning: ID x y z Station-ID (0..5 for transponder, 30 for master) x-coordinate of transponder y-coordinate of transponder height of transponder All positions must be entered in m and with a decimal point.](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-69.png)
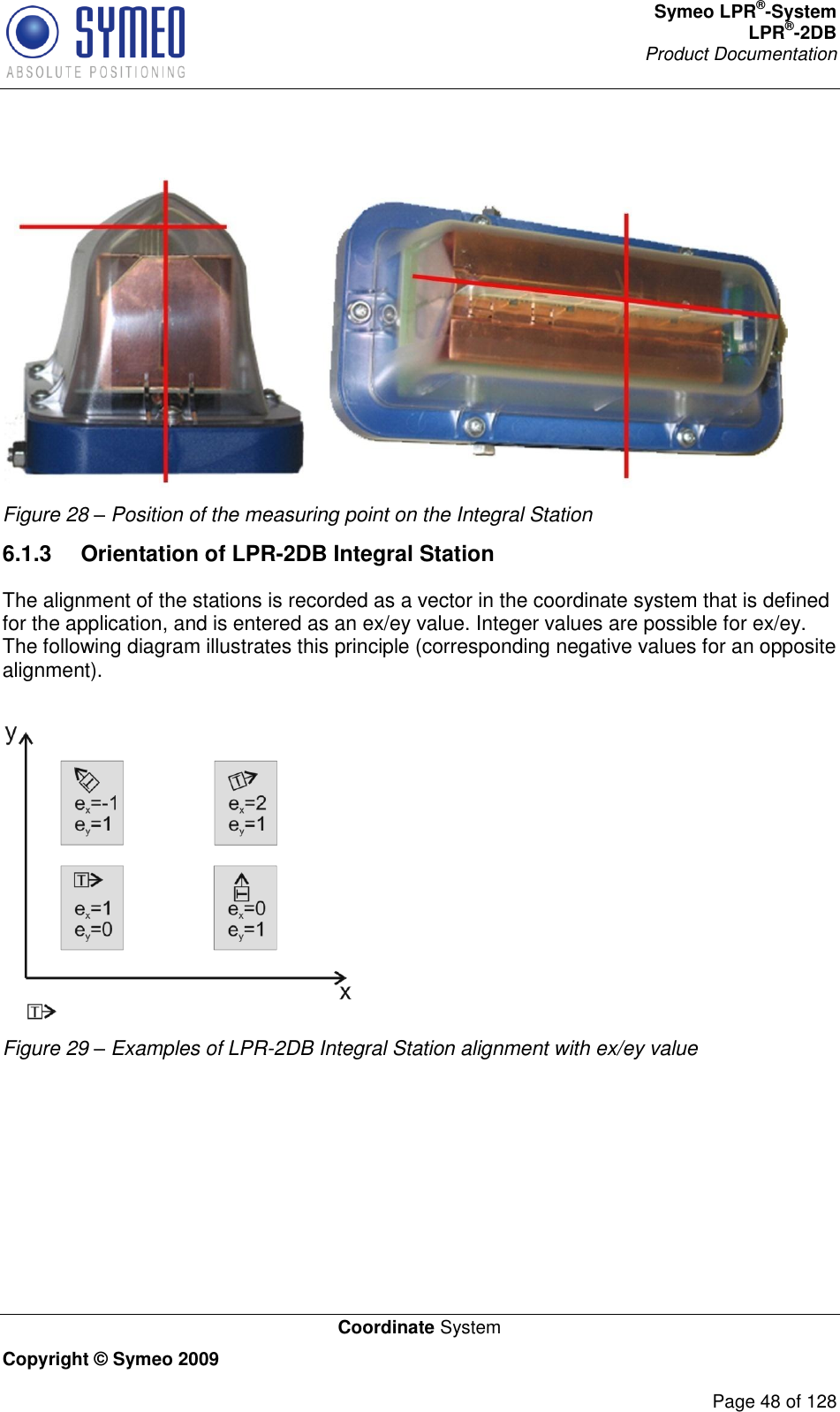
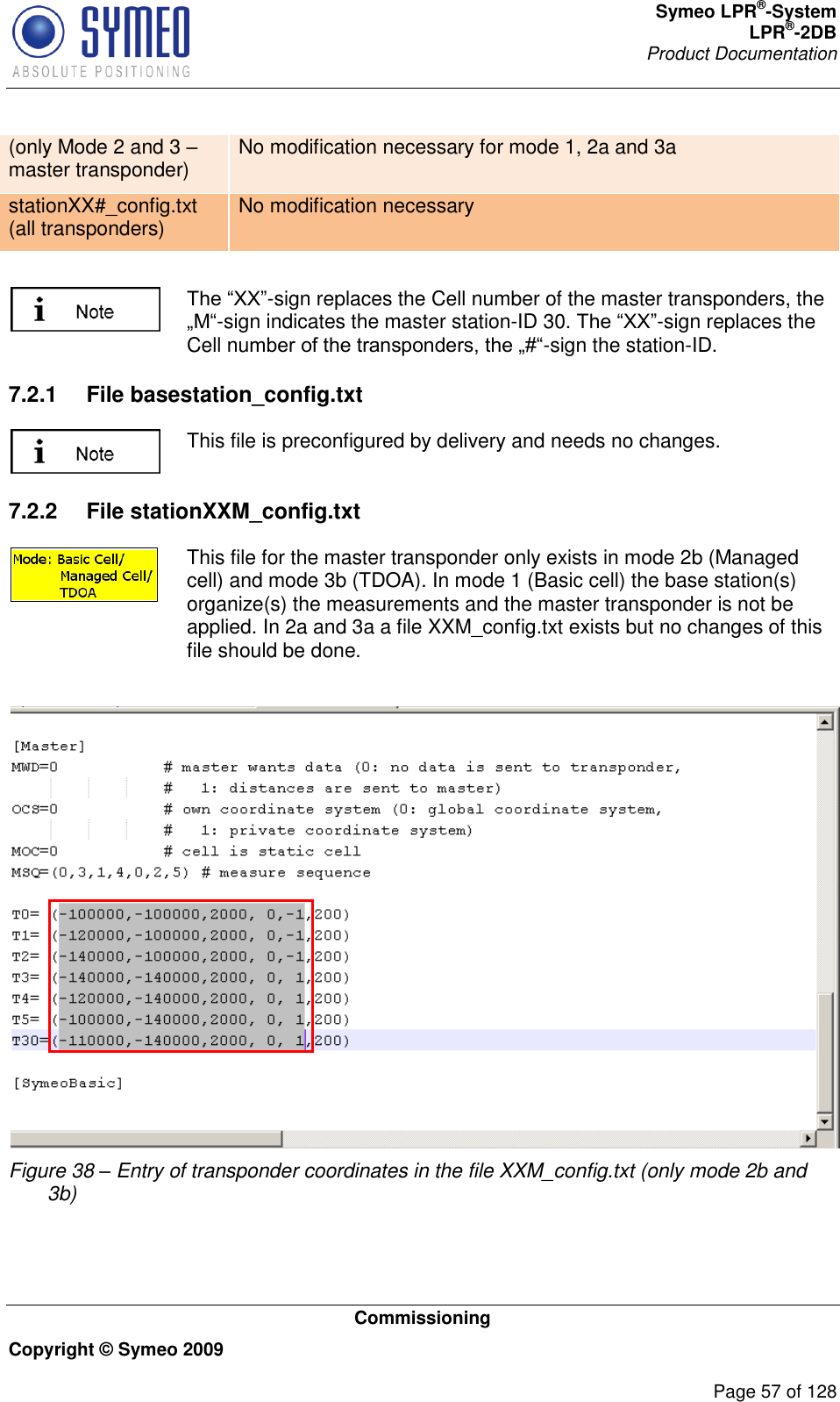
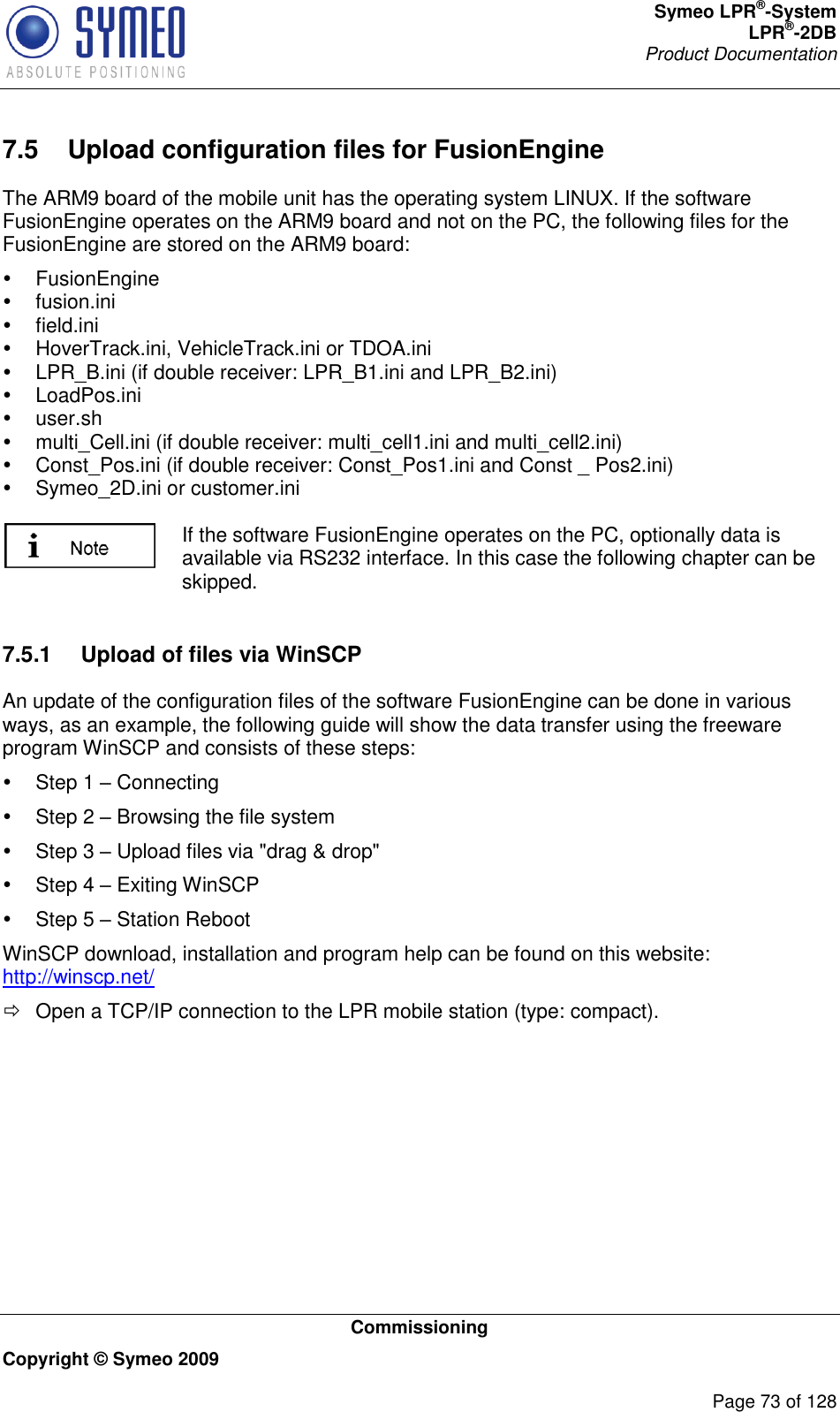
![Symeo LPR®-System LPR®-2DB Product Documentation Commissioning Copyright © Symeo 2009 Page 70 of 128 [Orientation] The orientation (ex, ey,ez) of every transponder of this cell. The columns have the following meaning: ID ex ey ez Station-ID (0..5 for transponder, 30 for master) x-orientation vector of transponder x-orientation vector of transponder z-orientation vector of transponder 7.4.3 LPR_B.ini This file contains the antenna positions (in vehicle coordinates) of the mobile unit antennas. Additionally in operation mode 1, 2a and 2b (all RTOF modes), this file contains the cable length of the used antennas. Figure 52 – LPR_B.ini (example) For all LPR-2DB stations with single receiver, there is one file LPR_B.ini with settings for up to 4 antennas. For all LPR-2DB stations with double receiver, there are two files (LPR_B1.ini and LPR_B2.ini) with settings for two antennas. [AntennaPos] The antenna position on the vehicle. All coordinate of the antenna are relative to the local coordinate system of the vehicle. The columns have the following meaning: ID x y z antenna port1) x-coordinate of antenna y-coordinate of antenna z-coordinate of antenna](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-70.png)
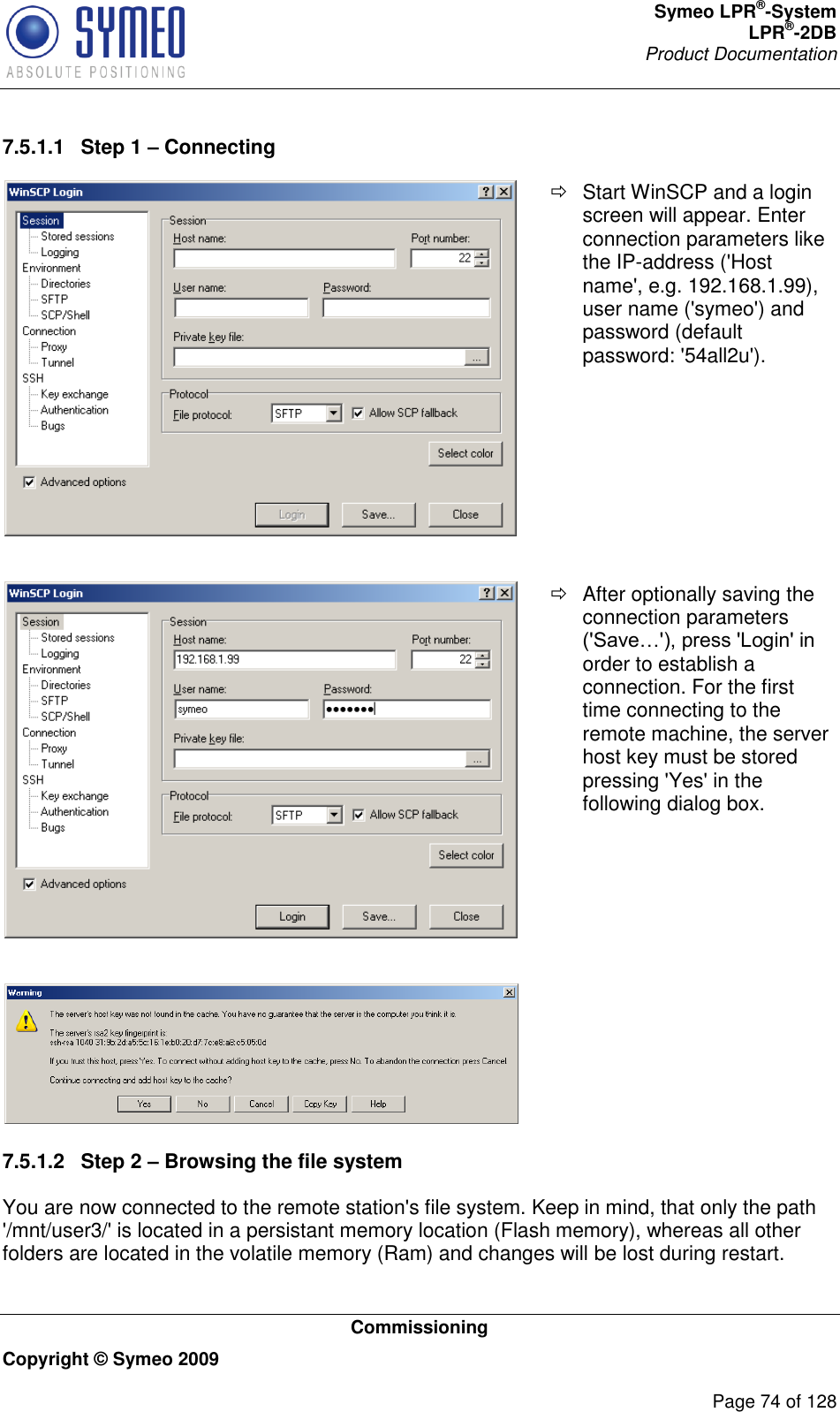
![Symeo LPR®-System LPR®-2DB Product Documentation Commissioning Copyright © Symeo 2009 Page 71 of 128 1) single receiver: 0..3 for antenna port 1..4, double receiver: 0 in file LPR_B1.ini for port 1, 0 in file LPR_B2.ini for port 2 All positions must be entered in m and with a decimal point. [CabelLength] Only in all RTOF modes (operation modes 1, 2a and 2b), the electrical cable length of antenna must be set. 7.4.4 LoadPos.ini This file contains the load position of the vehicle. It is entered in vehicle coordinates in m. The load position indicates the 2D position which is output in the customer interface. Figure 53 – LoadPos.ini (example) [dx], [dy] Offset of load position in vehicle coordinates. 7.4.5 Customer.ini (or Symeo_2D.ini) This file contains the settings for the customer interface (Symeo 2D protocol). Figure 54 – Symeo_2D.ini (example)](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-71.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Commissioning Copyright © Symeo 2009 Page 72 of 128 [Format] The format of the protocol output (ascii or binary). Additional settings for customizing customer protocol can be found in chapter 10.](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-72.png)
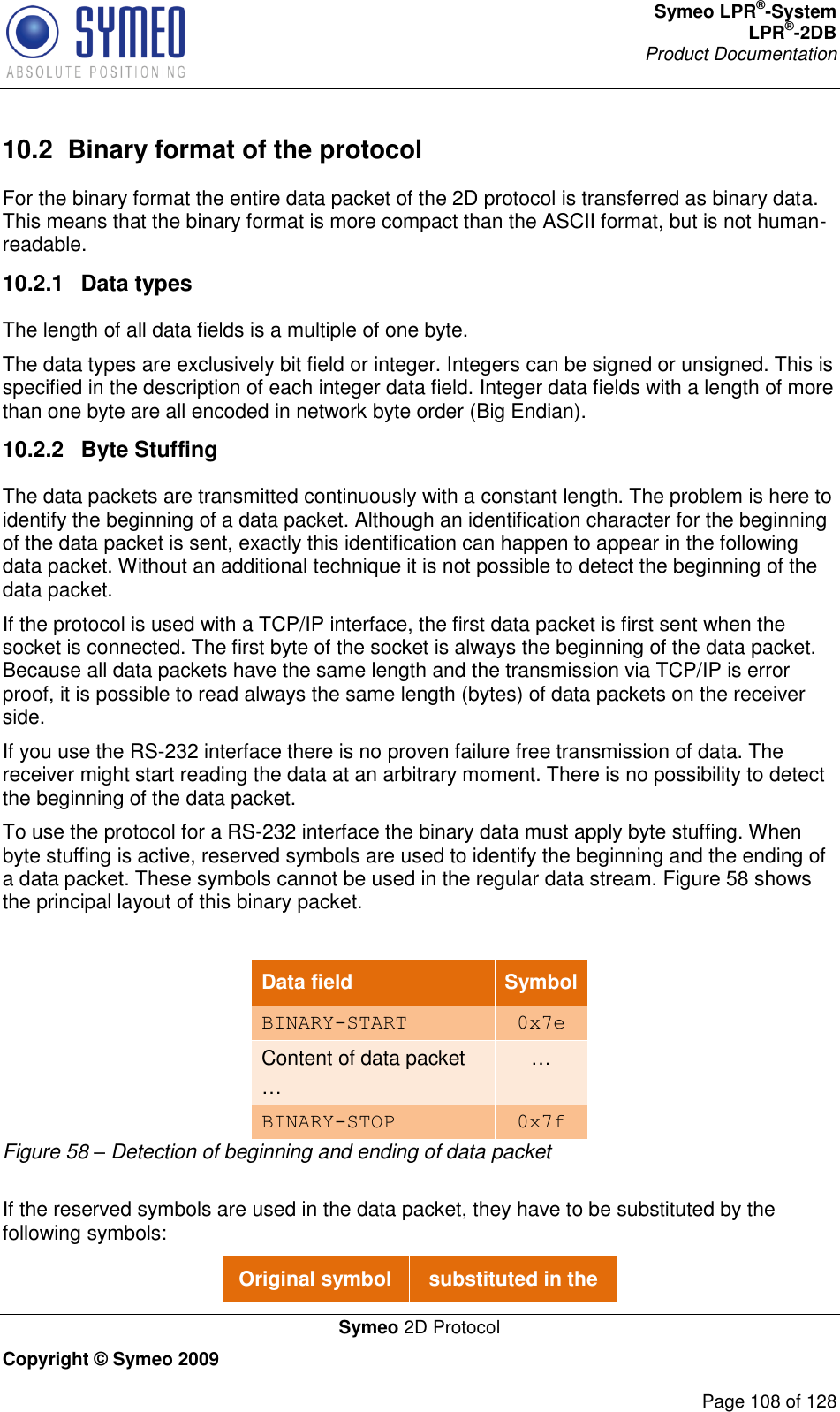
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 106 of 128 10 Symeo 2D Protocol10.1 Introduction / Basics The Symeo 2D protocol is the interface between the LPR 2D system and the user. To keep the protocol simple (i.e. easy to parse) the following aspects are considered: consistent data packet The protocol has a standard data packet with a fixed length. configuration The structure of the protocol can be configured by the user. It is possible to output only the required data. Therefore you can use also a slower data interface when using less data. The protocol is unidirectional. The LPR 2D system sends data to the user, but the LPR 2D system does not receive any data from the user. You can choose between the binary format and the ASCII format. The formal structure of both protocols is the same. 10.1.1 Configuration file Symeo_2D.ini To configure the protocol you have to set the parameters in the configuration file for the protocol (Symeo_2D.ini). Figure 57 – configuration file Symeo_2D.ini (example) The following text must be contained in the configuration file to choose the format of the protocol: [format] binary or [format] ascii](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-106.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 107 of 128 A protocol output is sent at regular intervals - independent of the availability of a valid position. The default output interval is 100 milliseconds. To set another output interval (e.g. 200 ms), insert the following parameter in the configuration file of the protocol: [OutputInterval_ms] 200 With the default configuration (OutputOnlyLockedTracks=1 in data field POSITION), only valid positions are sent (LOCKSTATE=2). If there is no valid position available, no protocol output is generated even if other data available (e.g. system errors). If the default configuration is overwritten (OutputOnlyLockedTracks=0), an output is generated after each [OutputInterval_ms] ms, even if no valid position is available. In this case a position output of (0,0) is sent and LOCKSTATE has a value of 0 or 1.](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-107.png)
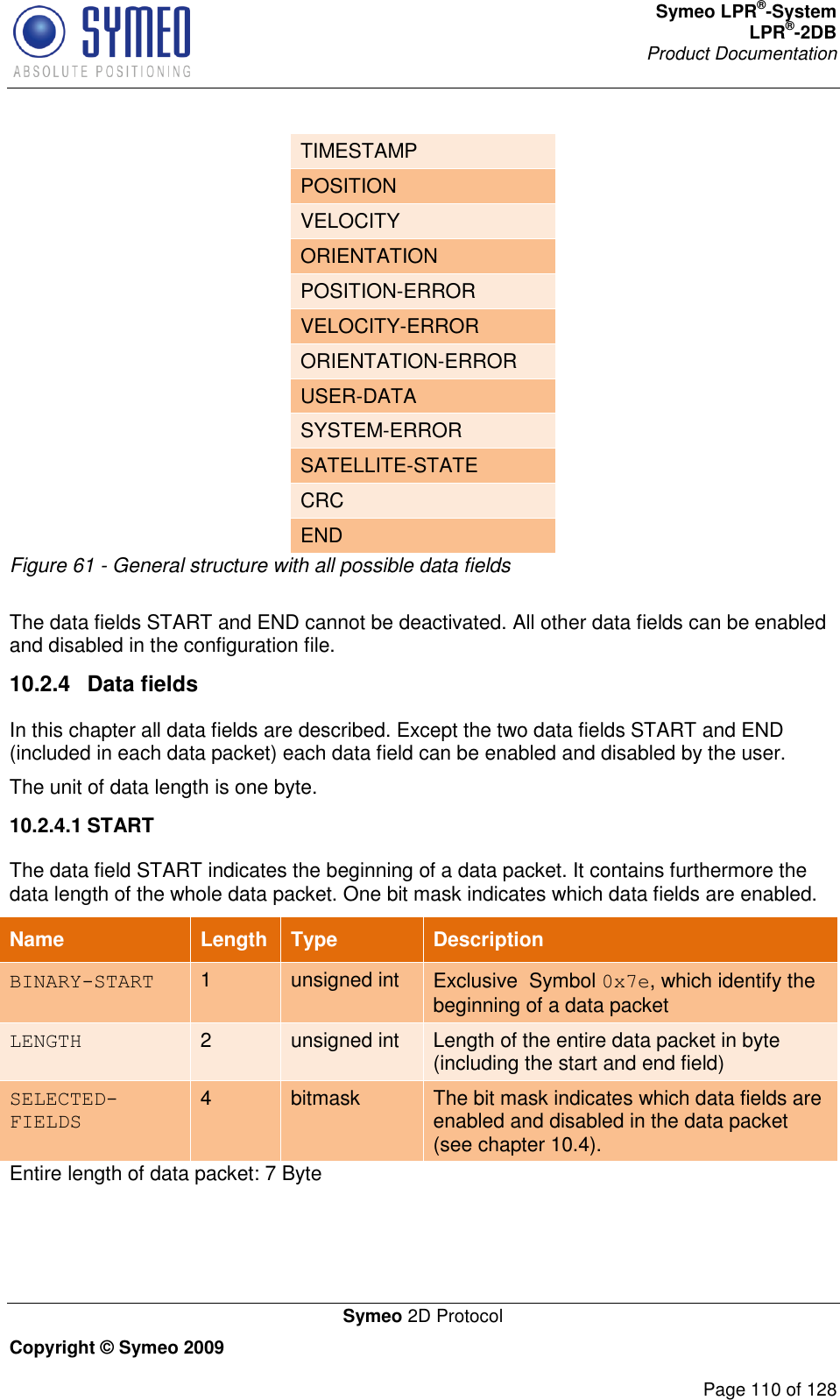
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 109 of 128 protocol by 0x7d 0x7d 0x5d 0x7e 0x7d 0x5e 0x7f 0x7d 0x5f Figure 59 – Substitution rules for byte stuffing Each time one of the three exclusive symbols occurs in the data packet it is replaced by two other symbols. In the worst case the whole data packet consists of exclusive symbols. In this case the length of the data packet is doubled. The byte stuffing makes sure that the receiver can identify the BINARY-START field definitively, even if the payload data contains the reserved symbol. Decoding the byte stuffing at the receiver side can be implemented as following: When reading symbol 0x7d, discard this symbol and combine the next symbol via XOR-function with 0x20, which will restore the original symbol. The byte stuffing can only be used for the binary format of the 2D protocol. It is activated per default. If you want to disable byte stuffing you have to enter in the configuration file the following line: [DisableBytestuffing] 1 10.2.3 General Structure The structure of the data packet of the 2D protocol is identified in the configuration file. For one configuration all data packets have the same length and the same structure. In the configuration file you identify the desired data fields. Figure 60 shows the structure of the data packet for the standard configuration. Data field START POSITION END Figure 60 - General structure of data packet with standard configuration If required additional data fields can be activated. The sequence of the activated data fields is fixed and cannot be changed. Figure 61 shows the structure of the data packet with all activated data fields. Data field START](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-109.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 111 of 128 10.2.4.2 END The data field END indicates the end of each data packet. Name Length Type Description BINARY-STOP 1 unsigned int Exclusive symbol 0x7f to identify the end of a data packet. Entire length of data packet: 1 Byte 10.2.4.3 TIMESTAMP This data field specifies the time when a position was taken. Due to the calculation time for the position this time is always in the past. If the hardware does not have a battery-buffered RTC (real time clock) the clock is set to 1.1.1970 00:00:00 at each reboot (e.g. if FusionEngine is running on ARM9). Name Length Type Description TS-SEC 4 unsigned int Number of seconds since 01.01.1970 00:00:00 TS-MSEC 2 unsigned int Additional number of milliseconds (0..999) Entire length of data packet: 6 Byte This data field can be activated by the following line in the configuration file: [SendTimestamp] 1 10.2.4.4 POSITION This data field displays the 2D position (x,y). Furthermore it shows the reliability of the position. Name Length Type Description POS-X 4 signed int signed x-position in mm POS-Y 4 signed int signed y-position in mm LOCKSTATE 1 unsigned int reliability of position: 0,1: position is not reliable 2: position is reliable Entire length of data packet: 9 Byte](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-111.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 112 of 128 This data field is enabled in each data packet per default. It can be disabled via the following line in the configuration file: [SendPosition] 0 The protocol is configured per default, that only a reliable position is output (LOCKSTATE 2). If also unreliable positions should be output the following line in the configuration file has to be changed: [OutputOnlyLockedTracks] 0 10.2.4.5 VELOCITY This data field indicates the velocity in x- and y- direction. Without knowing the orientation of the vehicle (data field ORIENTATION) it is not possible to identify if the vehicle is moving forward or backward. Name Length Type Description VEL-X 4 signed int Signed velocity in x direction in mm/s VEL-Y 4 signed int Signed velocity in y direction in mm/s Entire length of data packet: 8 Byte This data field can be enabled in the configuration file in the following line: [SendVelocity] 1 10.2.4.6 ORIENTATION This data field indicates the orientation of the vehicle. The angle is measured counter-clockwise, beginning at the x axis. Name Length Type Description ANGLE 2 unsigned int Orientation of vehicle in degree (0..359°) Entire length of data packet: 2 Byte This data field can be enabled in the configuration file via the following entry: [SendOrientation] 1 10.2.4.7 POSITION-ERROR This data field indicates the estimated position error (EPE). The EPE is always a positive value.](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-112.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 113 of 128 Name Length Type Description POS-ERR-X 4 unsigned int estimated error of x-position in mm POS-ERR-Y 4 unsigned int estimated error of y-position in mm Entire length of data packet: 8 Byte This data field can be activated in the configuration file via the following line: [SendPosError] 1 10.2.4.8 VELOCITY-ERROR This data field indicates the estimated velocity error. The value is always positive. Name Length Type Description VEL-ERR-VX 4 unsigned int estimated error of velocity in x-direction in mm/s VEL-ERR-VY 4 unsigned int estimated error of velocity in y-direction in mm/s Entire length of data packet: 8 Byte This data field can be activated in the configuration file via the following line: [SendVelError] 1 10.2.4.9 ORIENTATION-ERROR This data field indicates the estimated error of orientation. The value is always positive. Name Length Type Description ANGLE-ERR 2 unsigned int Estimated error of orientation in degree Entire length of data packet: 2 Byte This data field can be activated in the configuration file via the following line: [SendOrientationError] 1 10.2.4.10 USER-DATA This data field is used to indicate a user data packet. The meaning of the user data packet depends on the application.](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-113.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 114 of 128 Name Length Type Description USER-DATA-SET 8 unsigned int User data Entire length of data packet: 8 Byte This data field can be activated in the configuration file via the following line: [SendUserData] 1 10.2.4.11 SYSTEM-ERROR This data field provides information about possible errors of the system. Up to five errors can be displayed simultaneously in one data packet. An error code is sent as long as an error exists. Name Length Type Description ERROR-CODE-1 1 unsigned int Error code of 1st error ERROR-VALUE-1 2 unsigned int Error value of 1st error ERROR-CODE-2 1 unsigned int Error code of 2nd error ERROR-VALUE-2 2 unsigned int Error value of 2nd error ERROR-CODE-3 1 unsigned int Error code of 3rd error ERROR-VALUE-3 2 unsigned int Error value of 3rd error ERROR-CODE-4 1 unsigned int Error code of 4th error ERROR-VALUE-4 2 unsigned int Error value of 4th error ERROR-CODE-5 1 unsigned int Error code of 5th error ERROR-VALUE-5 2 unsigned int Error value of 5th error Entire length of data packet: 15 Byte A detailed description of all errors is written in chapter 10.6. If more than 5 errors exist at the same time, the special error code 0xff is sent as the ERROR-CODE-5. This data field can be enabled by the following instruction in the configuration file: [SendSystemError] 1 10.2.4.12 SATELLITE-STATE This data field is used for satellite-based localization and holds information about the positioning quality.](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-114.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 115 of 128 Name Length Type Description SAT-COUNT 1 signed int Number of satellites tracked The single allowed negative - SAT-HDOP 2 signed int 10 * horizontal dilution of precision So the integer 123 would mean a 12.3 HDOP. A --failure. Entire length of data packet: 3 Byte This data field can be activated in the configuration file via the following line: [SendSatelliteState] 1 10.2.4.13 CRC This data field displays the CRC (cyclic redundancy check) of each data packet. Name Length Type Description CRC-16 2 unsigned int CRC value of message Entire length of data field: 2 Byte A detailed description of CRCs can be found in chapter 10.5 as well as source code for the CRC. This data field can be enabled by the following line in the configuration file: [SendCRC] 1](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-115.png)

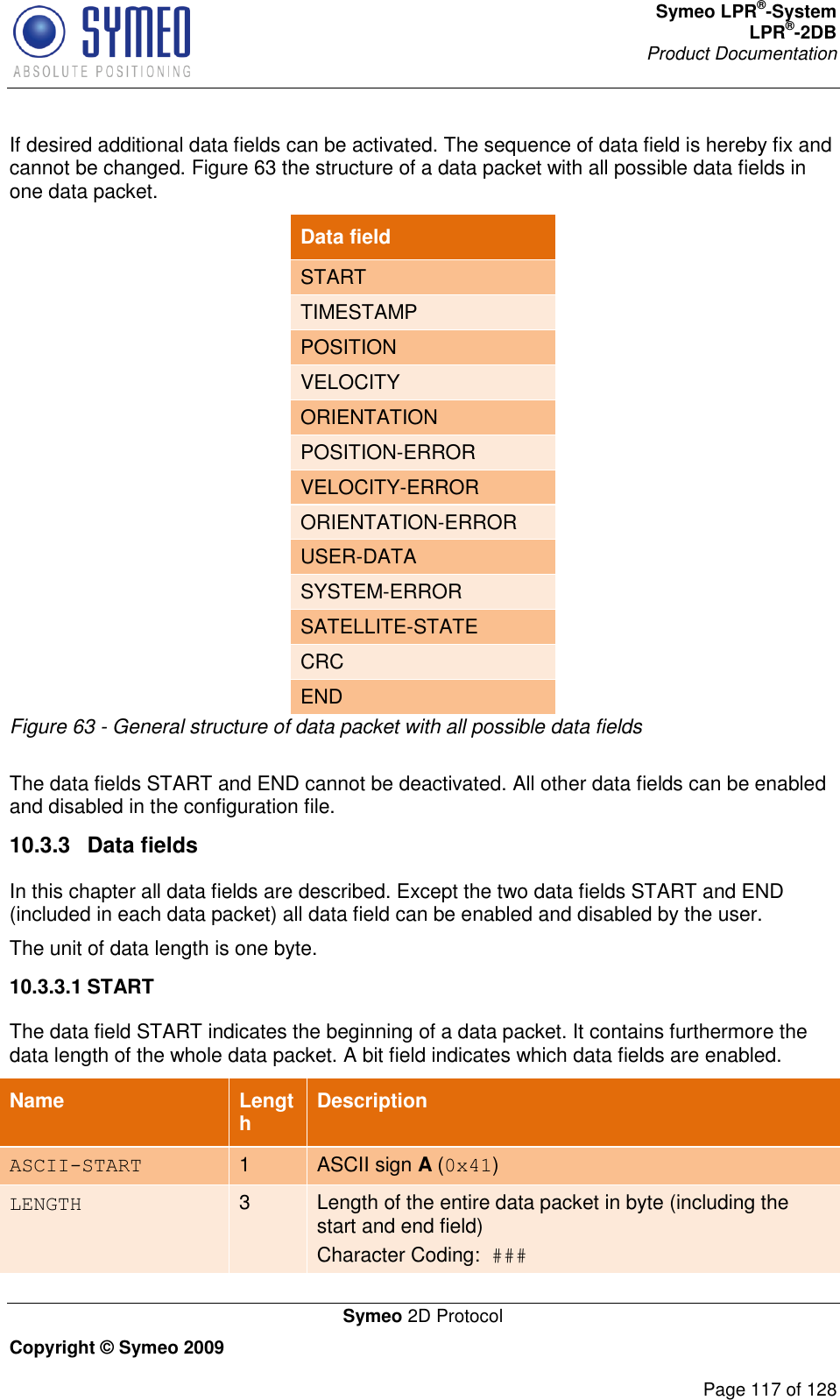
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 118 of 128 SELECTED-FIELDS 8 The bit mask indicates which data fields are enabled and disabled in the data packet. (see chapter 10.4). Character coding: ######## The bit field is coded hexadecimal! UNDERLINE 1 Underline character (ASCII Code 0x5F) Entire length of data field: 13 Byte 10.3.3.2 END The data field END indicates the end of each data packet. It consists of the single symbol \n. Name Length Description ASCII-STOP 1 ASCII sign \n (0x0a) Entire length of data packet: 1 Byte 10.3.3.3 TIMESTAMP This data field specifies the time when a position was taken. Due to the calculation time for the position this time is always in the past. If the hardware does not have a battery-buffered RTC (real time clock) the clock is set to 1.1.1970 00:00:00 at each reboot (e.g. if FusionEngine is running on ARM9). Entire length of data packet: 19 Byte This data field can be activated by the following line in the configuration file: [SendTimestamp] 1 Name Length Description TIME 4 ASCII string time TS-SEC 10 Number of seconds since 01.01.1970 00:00:00 Character coding: ########## UNDERLINE 1 Underline character (ASCII Code 0x5F) TS-MSEC 3 Additional number of milliseconds (0..999) Character coding: ### UNDERLINE 1 Underline character (ASCII Code 0x5F)](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-118.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 119 of 128 10.3.3.4 POSITION This data field displays the 2D position (x,y). Furthermore it displays the reliability of the position. Name Length Description X 1 ASCII character x POS-X 10 Signed x-Position in meters Character coding: +#####.### UNDERLINE 1 Underline character (ASCII Code 0x5F) Y 1 ASCII sign y POS-Y 10 Signed y-Position in meters Character coding: +#####.### UNDERLINE 1 Underline character (ASCII Code 0x5F) LOCKSTATE 1 Number for the reliability of the position: 0,1: position is not reliable 2: Position is reliable Character coding: # UNDERLINE 1 Underline character (ASCII Code 0x5F) Entire length of data packet: 26 Byte This data field is enabled in the default configuration. It can be deactivated by the following entry in the configuration file: [SendPosition] 0 The protocol is configured per default, that only a reliable position is output (LOCKSTATE 2). If unreliable positions should be output as well, the following line in the configuration file has to be changed: [OutputOnlyLockedTracks] 0 10.3.3.5 VELOCITY This data field indicates the velocity in x- and y- direction. Without knowing the orientation of the vehicle (data field ORIENTATION) it is not possible to identify if the vehicle is moving forward or backward. Name Length Description VX 2 ASCII string vx](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-119.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 120 of 128 VEL-X 6 Signed velocity in x-direction in m/s Character coding: +##.## UNDERLINE 1 Underline character (ASCII Code 0x5F) VY 2 ASCII string vy VEL-Y 6 Signed velocity in y-direction in m/s Character coding: +##.## UNDERLINE 1 Underline character (ASCII Code 0x5F) Entire length of data packet: 18 Byte This data field can be enabled in the configuration file via the following line: [SendVelocity] 1 10.3.3.6 ORIENTATION This data field indicates the orientation of the vehicle. The angle is measured counter-clockwise, beginning at the x axis. Name Length Description O 1 ASCII character o ANGLE 3 Orientation of vehicle in degree (0..359°) Character coding: ### UNDERLINE 1 Underline character (ASCII Code 0x5F) Entire length of data packet: 5 Byte This data field can be enabled in the configuration file via the following entry: [SendOrientation] 1 10.3.3.7 POSITION-ERROR This data field indicates the estimated position error (EPE). The EPE is always a positive value. Name Length Description EX 2 ASCII string ex POS-ERR-X 5 Estimated error of x-position in m Number coding: ##.## UNDERLINE 1 Underline character (ASCII Code 0x5F)](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-120.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 121 of 128 EY 2 ASCII string ey POS-ERR-Y 5 Estimated error of y-position in m Number coding: ##.## UNDERLINE 1 Underline character (ASCII Code 0x5F) Entire length of data packet: 16 Byte This data field can be activated in the configuration file via the following line: [SendPosError] 1 10.3.3.8 VELOCITY-ERROR This data field indicates the estimated velocity error. The value is always positive. Name Length Description EVX 3 ASCII string evx POS-ERR-X 5 Estimated error of velocity in x-direction in m/s Character coding: ##.## UNDERLINE 1 Underline character (ASCII Code 0x5F) EVY 3 ASCII string evy POS-ERR-Y 5 Estimated error of velocity in y-direction in mm/s Character coding: ##.## UNDERLINE 1 Underline character (ASCII Code 0x5F) Entire length of data packet: 18 Byte This data field can be activated in the configuration file via the following line: [SendVelError] 1 10.3.3.9 ORIENTATION-ERROR This data field indicates the estimated error of orientation. The value is always positive. Name Length Description EO 2 ASCII string eo ANGLE-ERR 3 Estimated error of orientation in degree Character coding: ### UNDERLINE 1 Underline character (ASCII Code 0x5F) Entire length of data packet: 6 Byte](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-121.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 122 of 128 This data field can be activated in the configuration file via the following line: [SendOrientationError] 1 10.3.3.10 USER-DATA This data field is used to indicate a user data packet. The meaning of the user data packet depends on the application. Name Length Description USER 4 ASCII string user USER-DATA-SET 16 User data Character coding: ################ User data is coded hexadecimal! UNDERLINE 1 Underline character (ASCII Code 0x5F) Entire length of data packet: 21 Byte This data field can be activated in the configuration file via the following line: [SendUserData] 1 10.3.3.11 SYSTEM-ERROR This data field provides information about possible errors of the system. Up to five errors can be displayed simultaneously in one data packet. An error code is sent as long as an error exists. Name Length Description ERR 3 ASCII string err ERROR-CODE-1 2 Error code of 1st error Character coding: ## Value is coded hexadecimal! ERROR-VALUE-1 4 Error value of 1st error Character coding: #### Value is coded hexadecimal! UNDERLINE 1 Underline character (ASCII Code 0x5F) ERROR-CODE-2 2 Error code of 2nd error ERROR-VALUE-2 4 Error value of 2nd error UNDERLINE 1 Underline character (ASCII Code 0x5F)](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-122.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 123 of 128 ERROR-CODE-3 2 Error code of 3rd error ERROR-VALUE-3 4 Error value of 3rd error UNDERLINE 1 Underline character (ASCII Code 0x5F) ERROR-CODE-4 2 Error code of 4th error ERROR-VALUE-4 4 Error value of 4th error UNDERLINE 1 Underline character (ASCII Code 0x5F) ERROR-CODE-5 2 Error code of 5th error ERROR-VALUE-5 4 Error value of 5th error UNDERLINE 1 Underline character (ASCII Code 0x5F) Entire length of data packet: 38 Byte A detailed description of all errors is written in chapter 10.6. If there are more than five errors the special error 0xff is sent as the ERROR-CODE-5. This data field can be enabled by the following instruction in the configuration file: [SendSystemError] 1 10.3.3.12 SATELLITE-STATE This data field is used for satellite-based localization and holds information about the positioning quality. Name Length Description SAT 3 ASCII string sat SAT-COUNT 2 Number of satellites tracked Character coding: ## - UNDERLINE 1 Underline character (ASCII Code 0x5F) SAT-HDOP 4 Horizontal dilution of precision Character coding: ##.# - UNDERLINE 1 Underline character (ASCII Code 0x5F) Entire length of data packet: 11 Byte This data field can be activated in the configuration file via the following line: [SendSatelliteState] 1](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-123.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 124 of 128 10.3.3.13 CRC This data field displays the CRC (cyclic redundancy check) of each data packet. Name Length Description CRC 3 ASCII string crc CRC-16 4 CRC-value of message Character coding: #### Value is coded hexadecimal! Entire length of data field: 7 Byte A detailed description of CRCs as well as source code for the CRC can be found in chapter 10.5. This data field can be enabled by the following line in the configuration file: [SendCRC] 1 10.4 Bit Mask SELECTED-FIELDS The bit mask SELECTED-FIELDS is part of the data field START. It indicates which bit fields are activated. Once the bit mask is configured, each data packet has the same length and the same structure. Therefore the value of the bit mask SELECTED-FIELDS is constant. By evaluation of the bit mask at the receiver side it is possible to check for plausibility of the configuration file. Each data field is presented as a single bit in the bit mask. If the data field is activated the related bit is set. Figure 64 shows the allocation of the single bits and data fields. Bit 31 is the most significant bit and is found in the ASCII format of the protocol on the left most side. Important: The order of bits in this bit mask does not correspond to the order of data fields in a data packet. The order of the data fields is described in chapter 10.2.3 (binary format) or chapter 10.3.2 (ASCII format). Bit Data field Bit Data field 31 - 15 - 30 - 14 - 29 - 13 - 28 - 12 - 27 - 11 - 26 - 10 SATELLITE-STATE](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-124.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 125 of 128 Figure 64 - Mapping Bitmask – Data fields 10.5 CRC Calculation To detect errors during data transmission, the data field CRC can be activated. For CRC the CRC-16-IBM is used with the polynomial x16+x15+x2+1. The CRC is applied to all previous data fields of the data packet except the data field START. Example source code for CRC calculation in C: // Holds a table to calculate crc16 values static Uint16 crc_table[256]; // Initializes the CRC table // MUST BE RUN before first crc calculation Void InitCRCtable( void ) { int i, j; Uint16 k; for (i = 0; i < 256; i++) crc_table[i] = i; for (i = 0; i < 256; i++) { k = 0xC0C0; for (j = 1; j < 256; j <<= 1) { if (i & j) crc_table[i] ^= k; k = ((k & 0x7FFF) << 1) ^ 0x4003; } } } 25 - 9 CRC 24 - 8 SYSTEM-ERROR 23 - 7 USER-DATA 22 - 6 ORIENTATION-ERROR 21 - 5 VELOCITY-ERROR 20 - 4 POSITION-ERROR 19 - 3 ORIENTATION 18 - 2 VELOCITY 17 - 1 POSITION 16 - 0 TIMESTAMP](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-125.png)
![Symeo LPR®-System LPR®-2DB Product Documentation Symeo 2D Protocol Copyright © Symeo 2009 Page 126 of 128 // Adds calculation for an 8 bit value to crc. // Initially crc should be zero. Uint16 CalcCRC8(Uint16 crc, Uint8 value) { crc = (crc >> 8 ) ^ crc_table[(crc & 0xFF) ^ value]; return crc; } 10.6 Error Codes If the system identifies self-contained an error (self-diagnosis), a system error is sent. The error is sent as long as the error is not repaired. I.e. if a broken transponder is recognized as broken then the appropriate error code is sent until the transponder is able to make a correct measurement. A special case is the error code 0xff. This error is sent if more than 5 errors appear at the same time. Therefore not all error codes can be transmitted. This special error code is only sent for the last error code of the system failure (ERROR-CODE-5). An error consists always of the error code. Optional it can feature an error value which consists of additional information to the error code. 10.6.1 Overview Overview of error codes: Code Meaning 0x01 broken TDOA cell master 0x02 broken transponder 0x05 broken LPR antenna 0x06 broken hardware component 0xff Further errors active 10.6.2 Error codes 10.6.2.1 0x01 – broken TDOA cell master If a TDOA cell master is broken, no measure commands are sent to the transponder of the cell. If a transponder doesn't receive a measure command, it broadcasts an IDLE message once per second. But this can also happen if the line of sight between cell master and a single transponder is broken (e.g. an obstacle between in the line of sight).](https://usermanual.wiki/Symeo/BSB/User-Guide-1735383-Page-126.png)