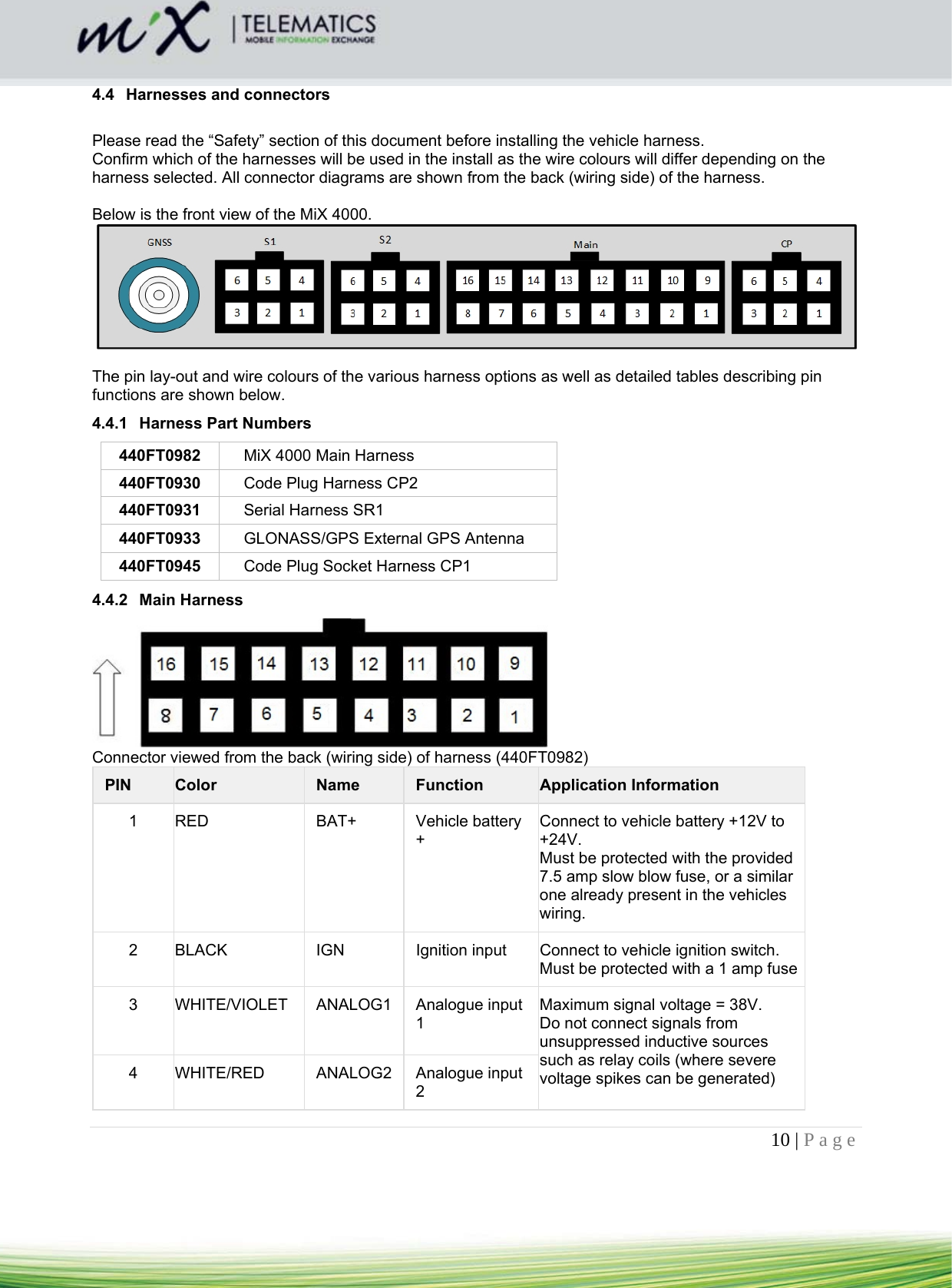
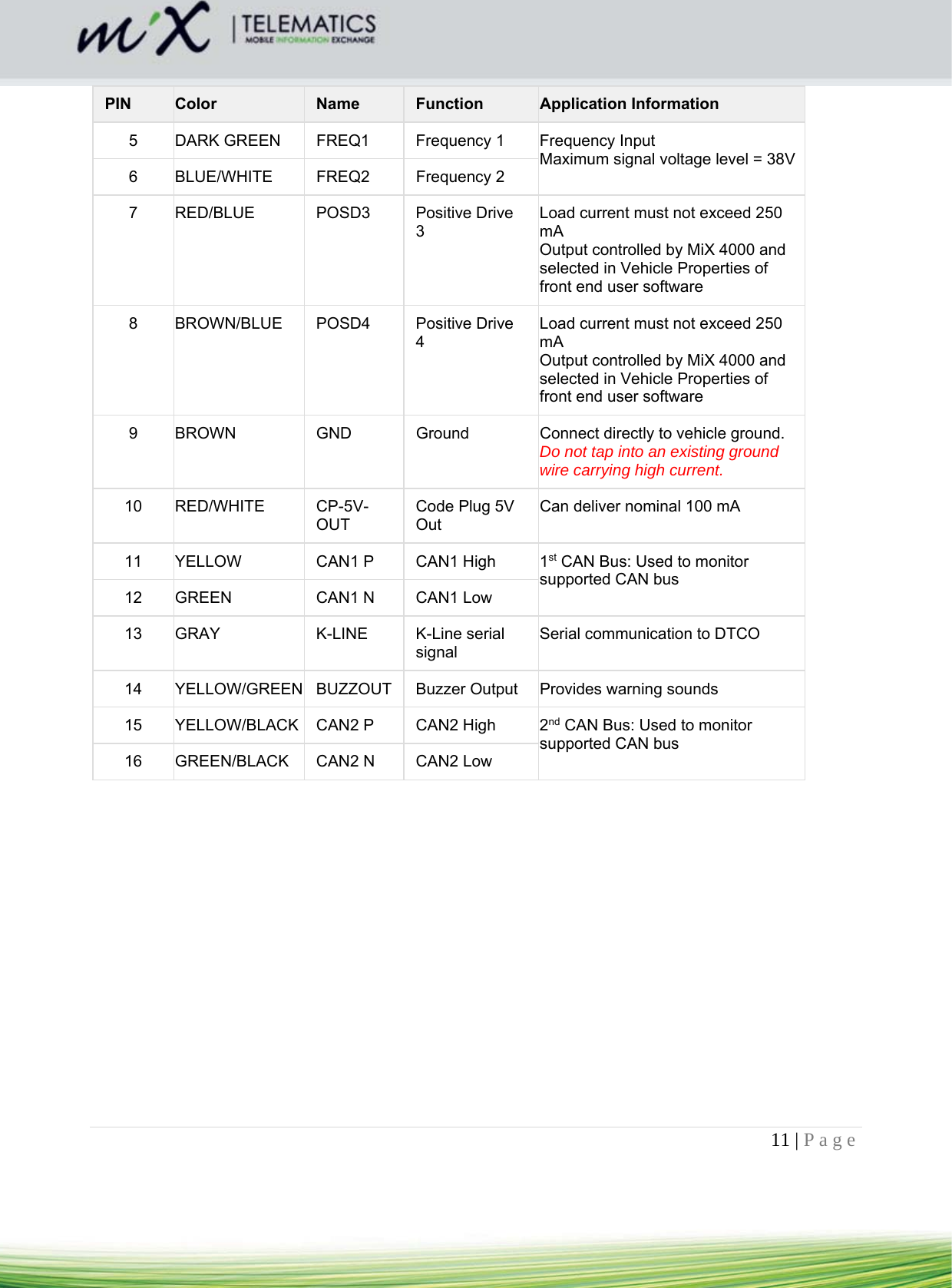
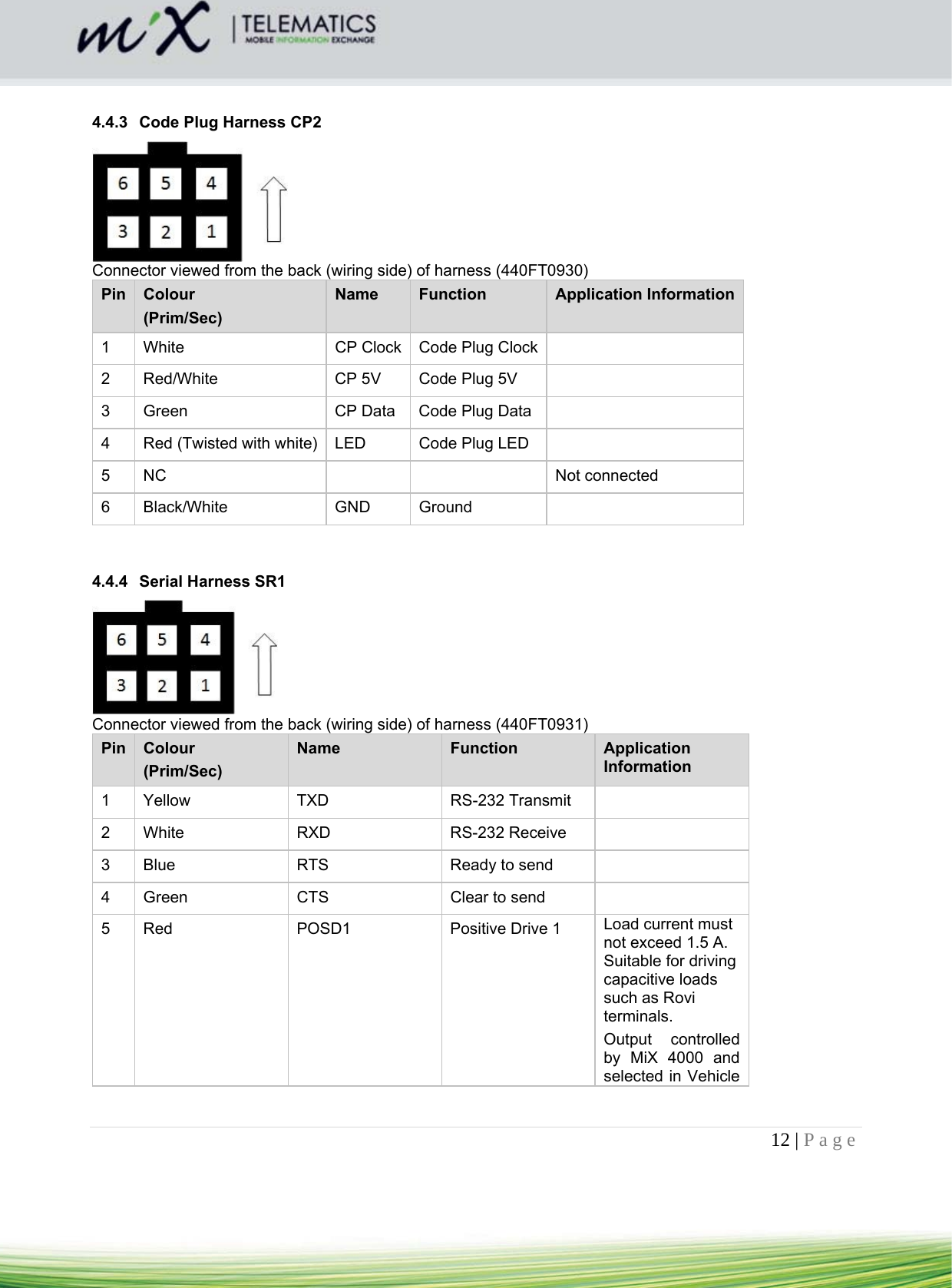
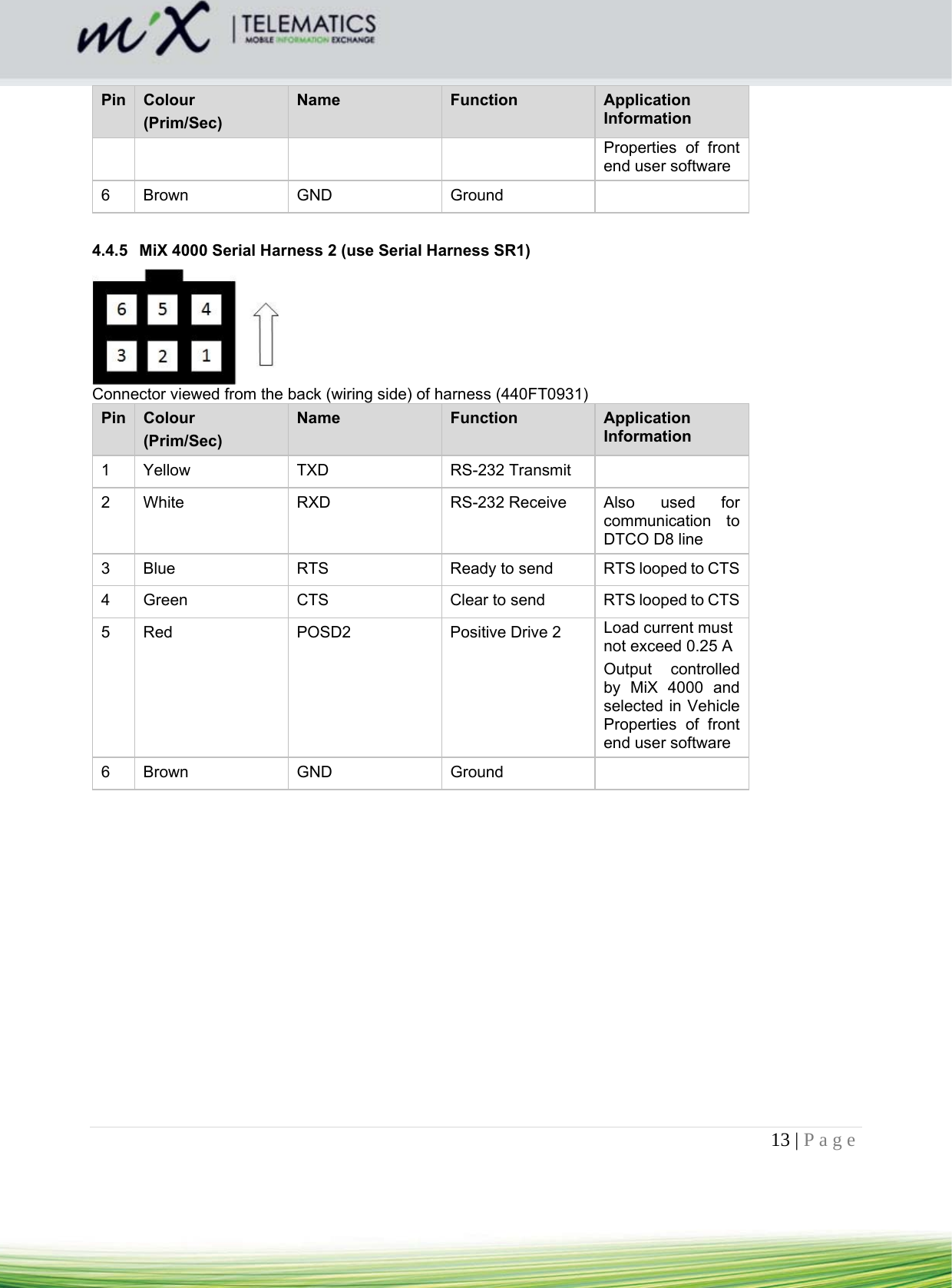
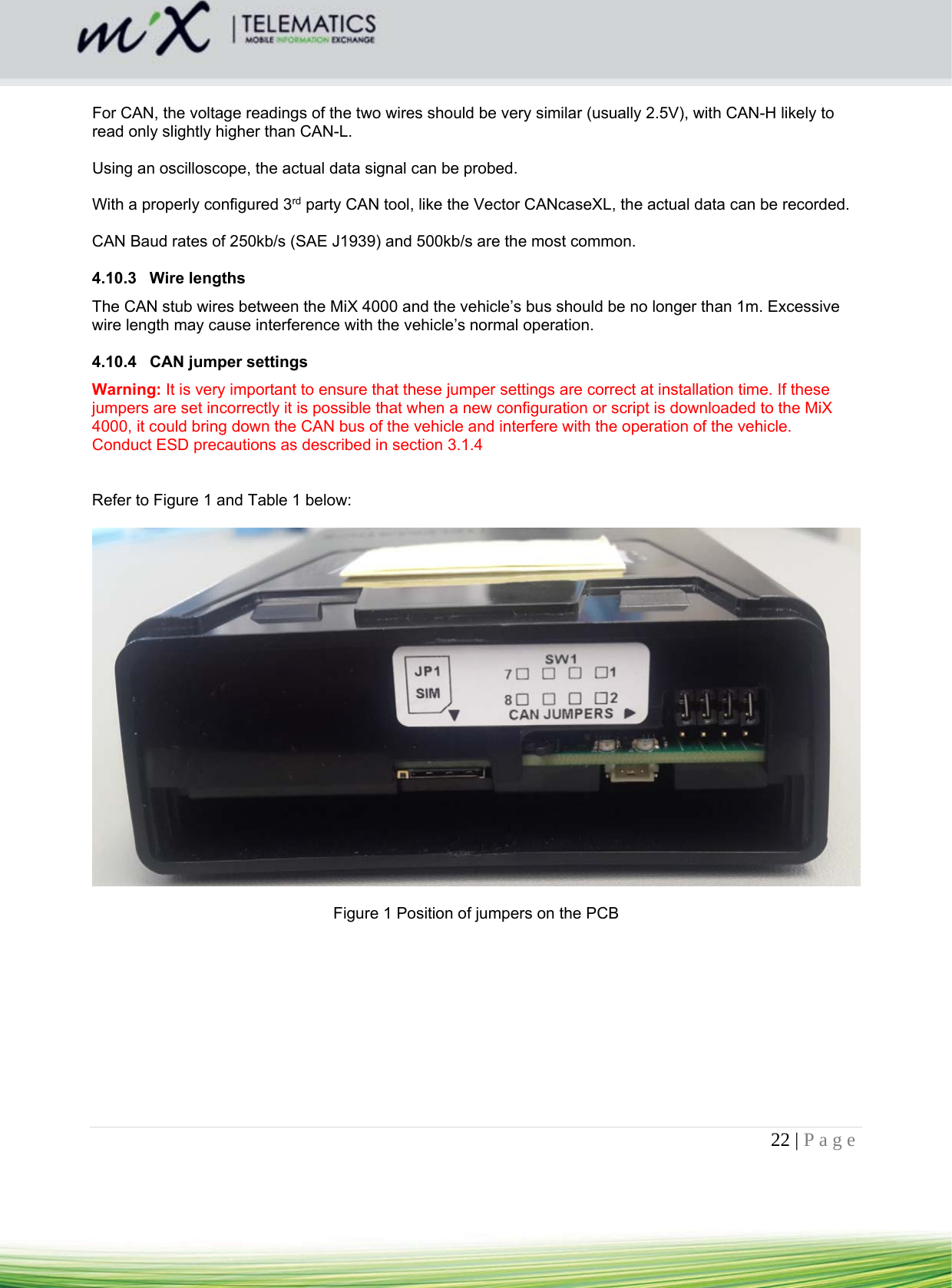
MiX Telematics 41MC3G Mobile base station with BT(LE), SRD and GSM modem User Manual Installation Guide MiX 4000 v8
MiX Telematics Mobile base station with BT(LE), SRD and GSM modem Installation Guide MiX 4000 v8
UserManual.wiki
>
MiX Telematics
>
41MC3G User Manual
User manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation