MYLAPS AMBGP4 RC Model Car Timing Receiver and PC Interface User Manual rev1 1d
MYLAPS BV RC Model Car Timing Receiver and PC Interface rev1 1d
UserManual.wiki
>
MYLAPS
>
AMBGP4 User Manual
manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
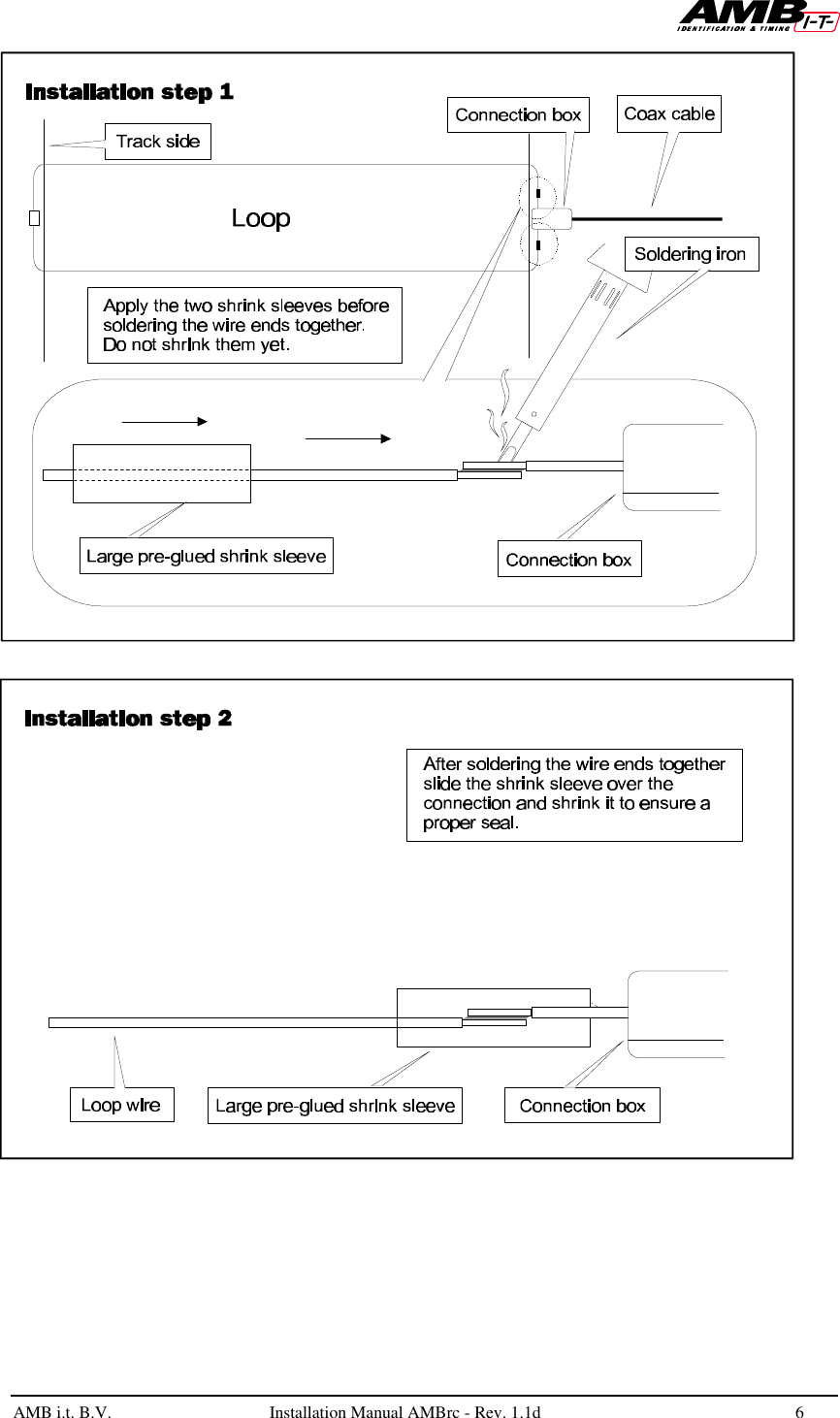
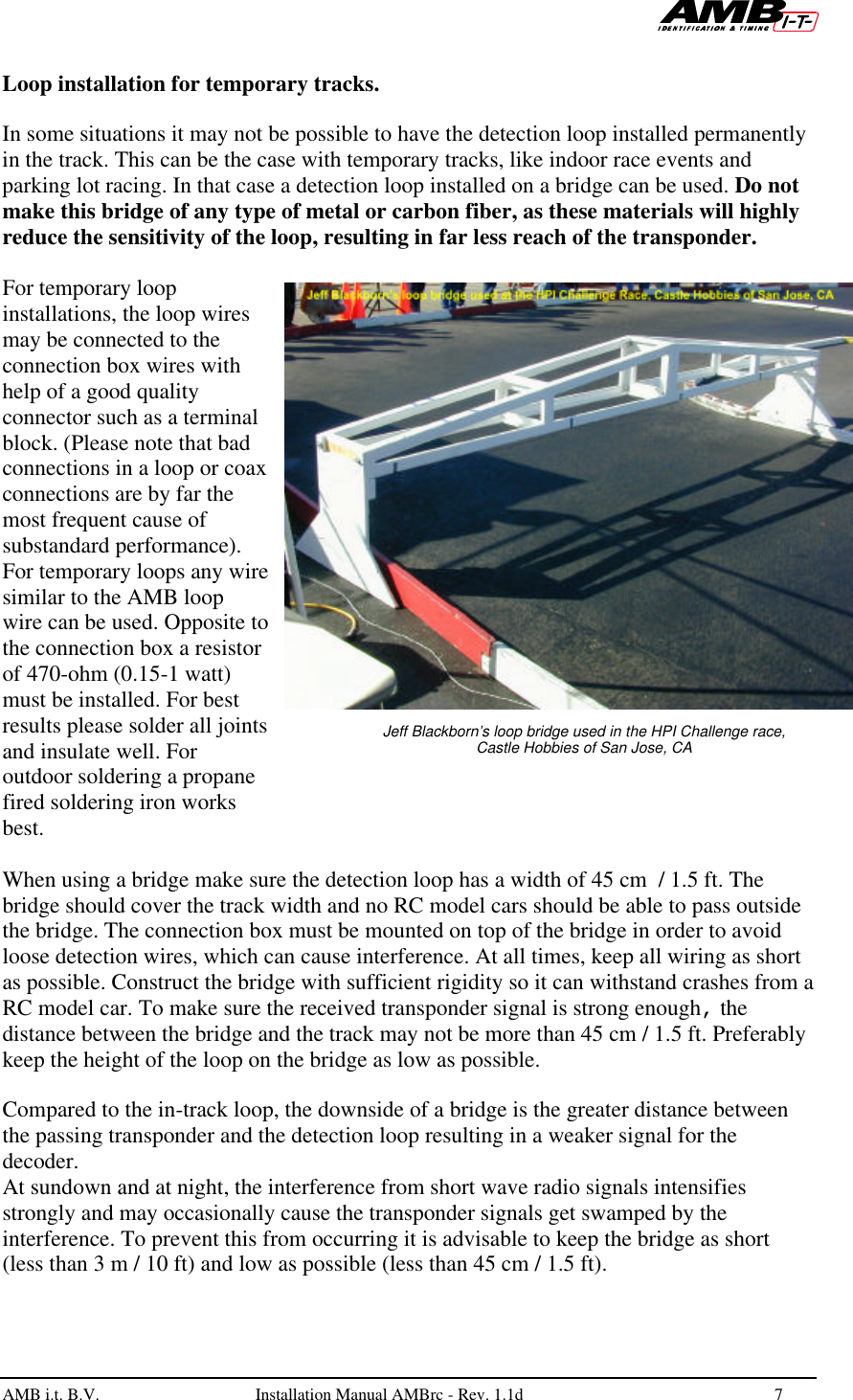
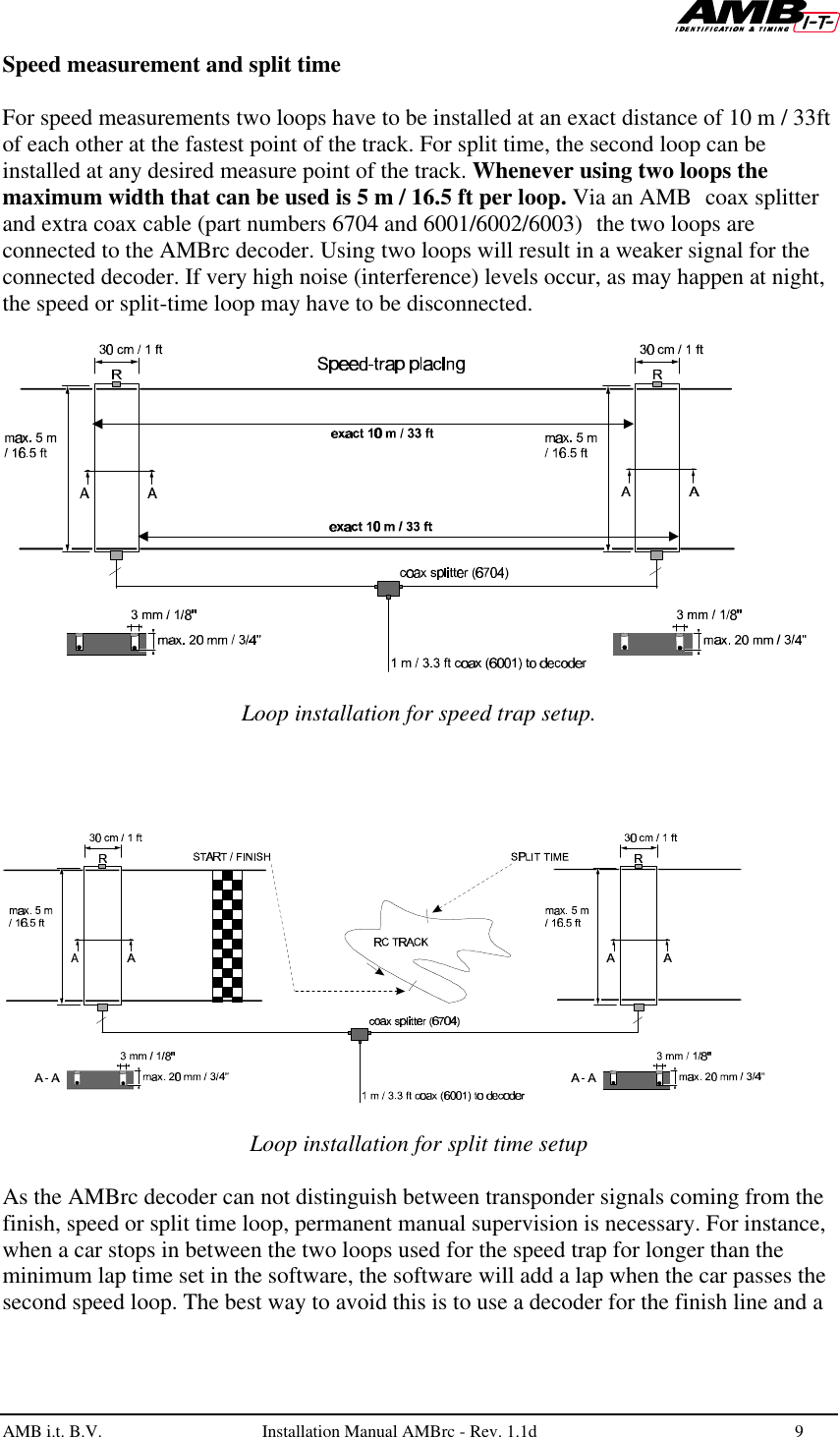
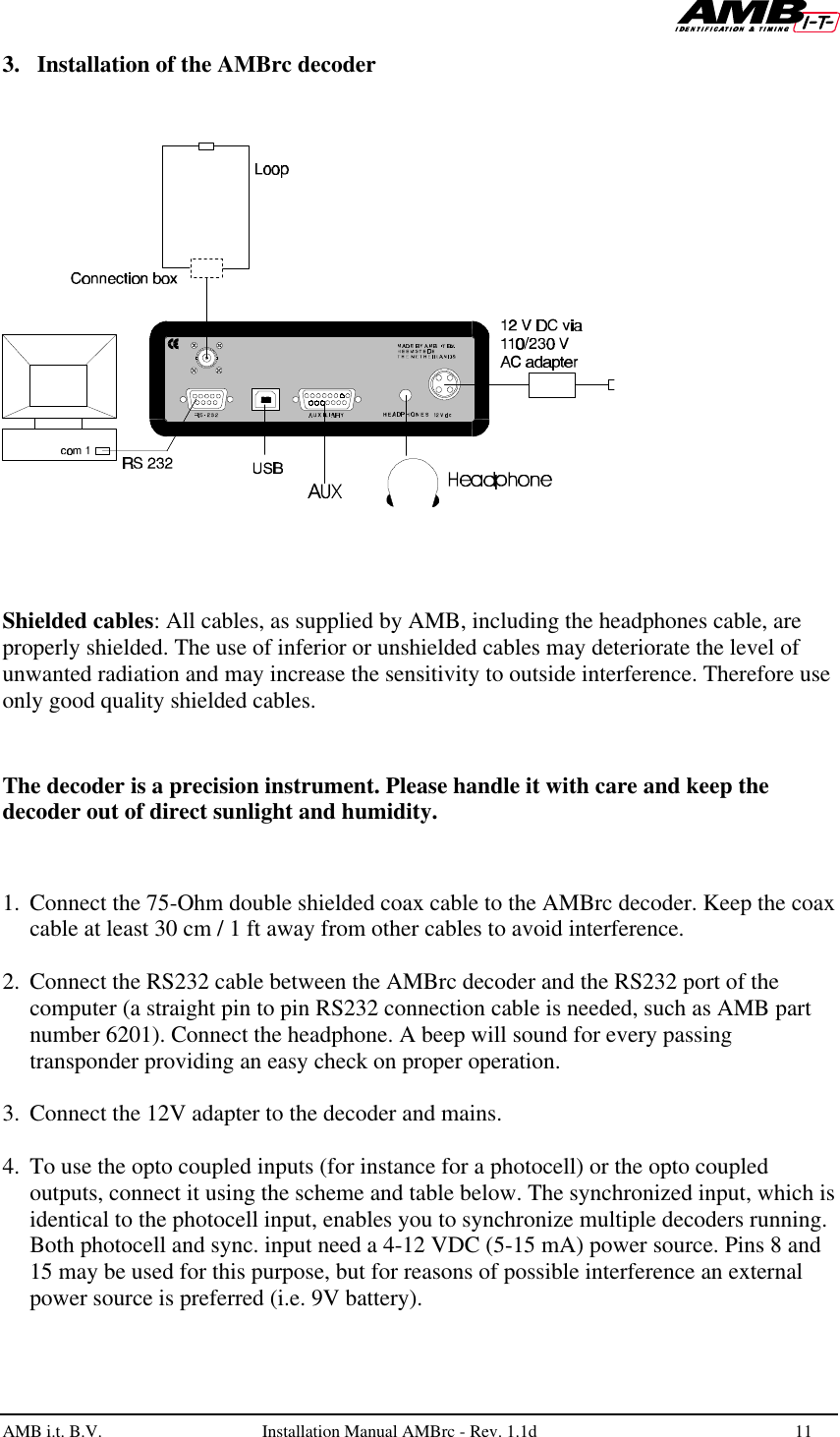
User Manual
Discussion / Help
Navigation