Honeywell Enraf 990SRFL-2 Radar Level Tank Gauge User Manual Service Manual
Honeywell Enraf Radar Level Tank Gauge Service Manual
UserManual.wiki
>
Honeywell Enraf
>
990SRFL 2 User Manual
Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation
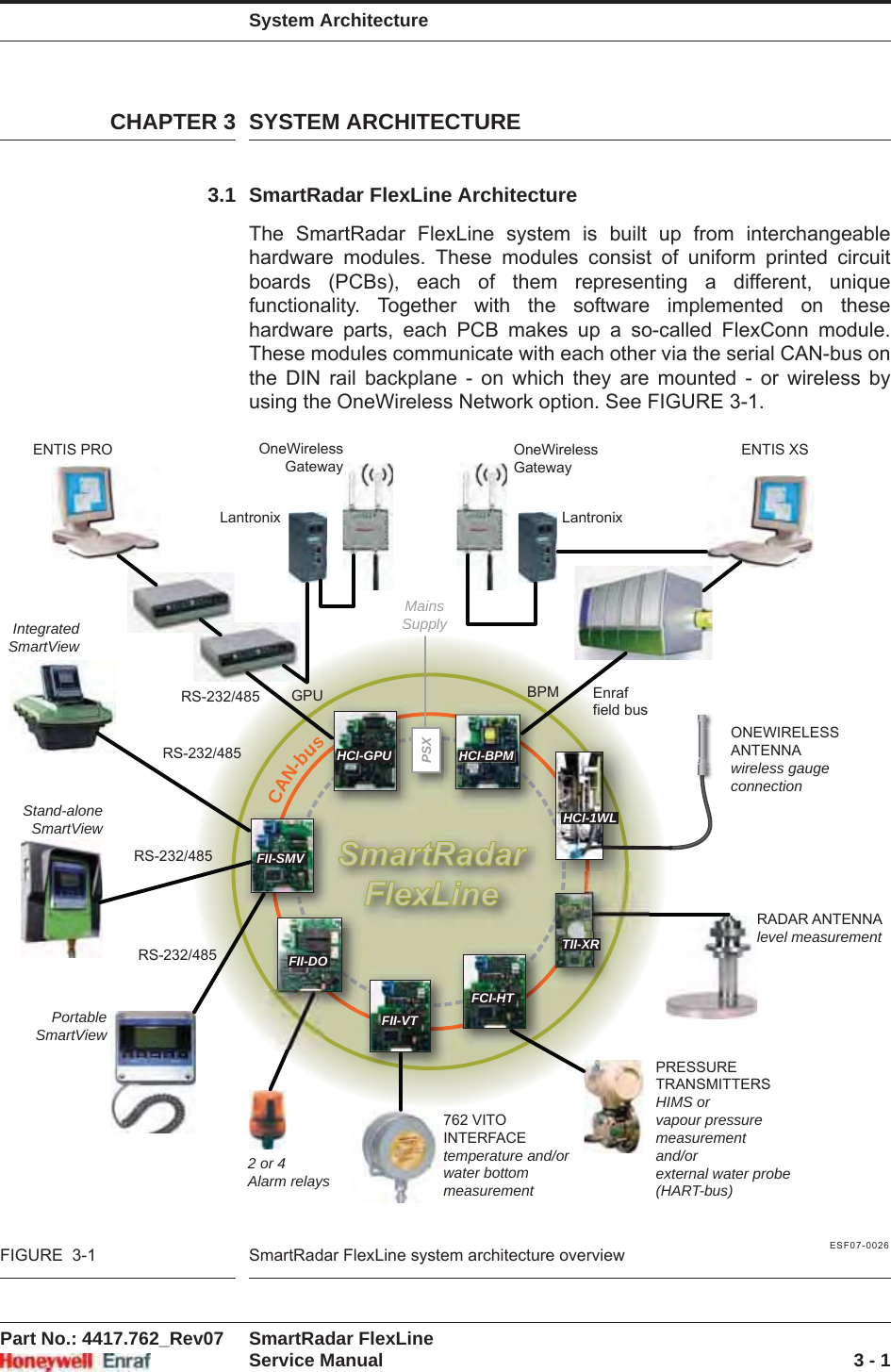
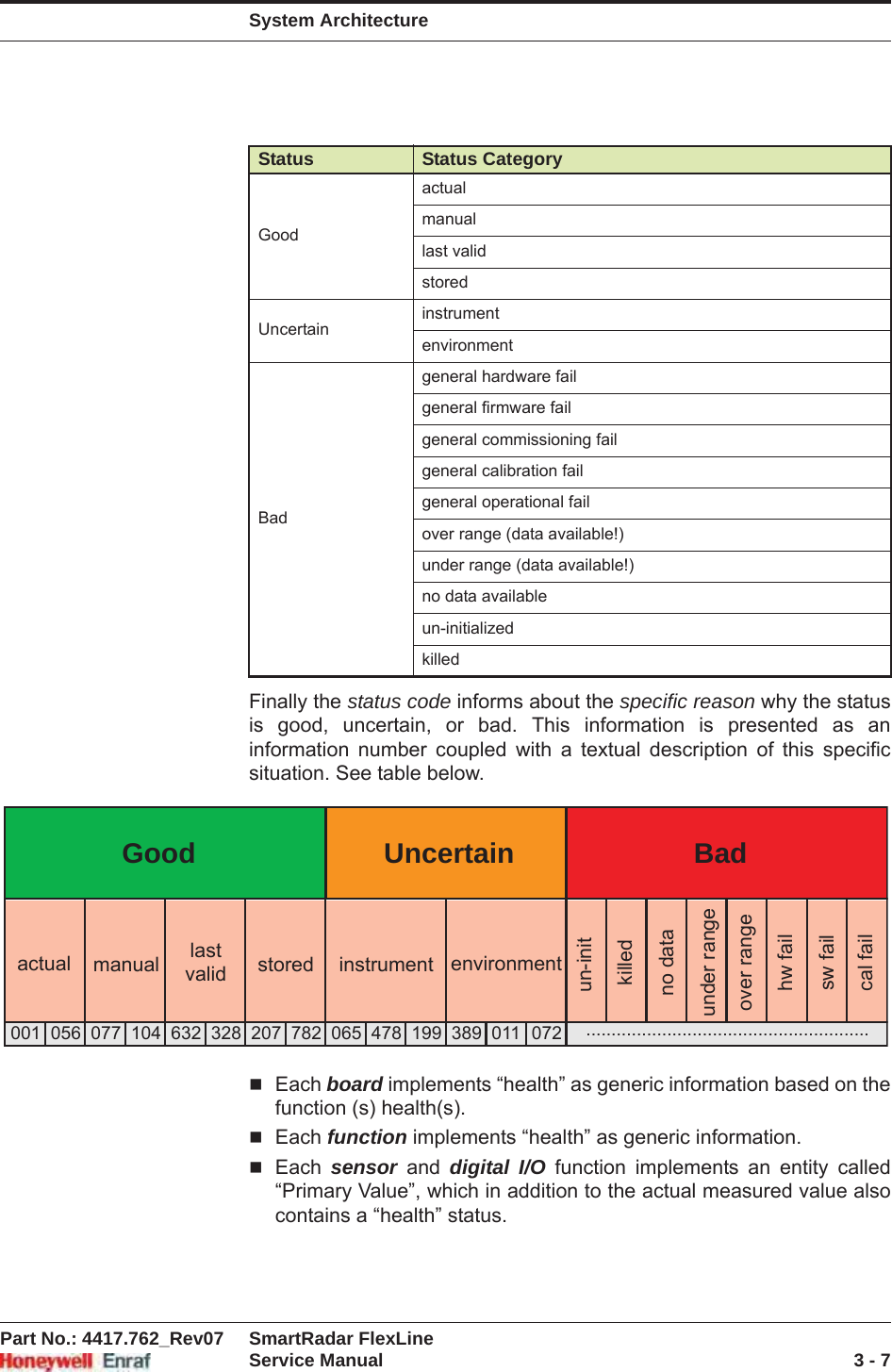
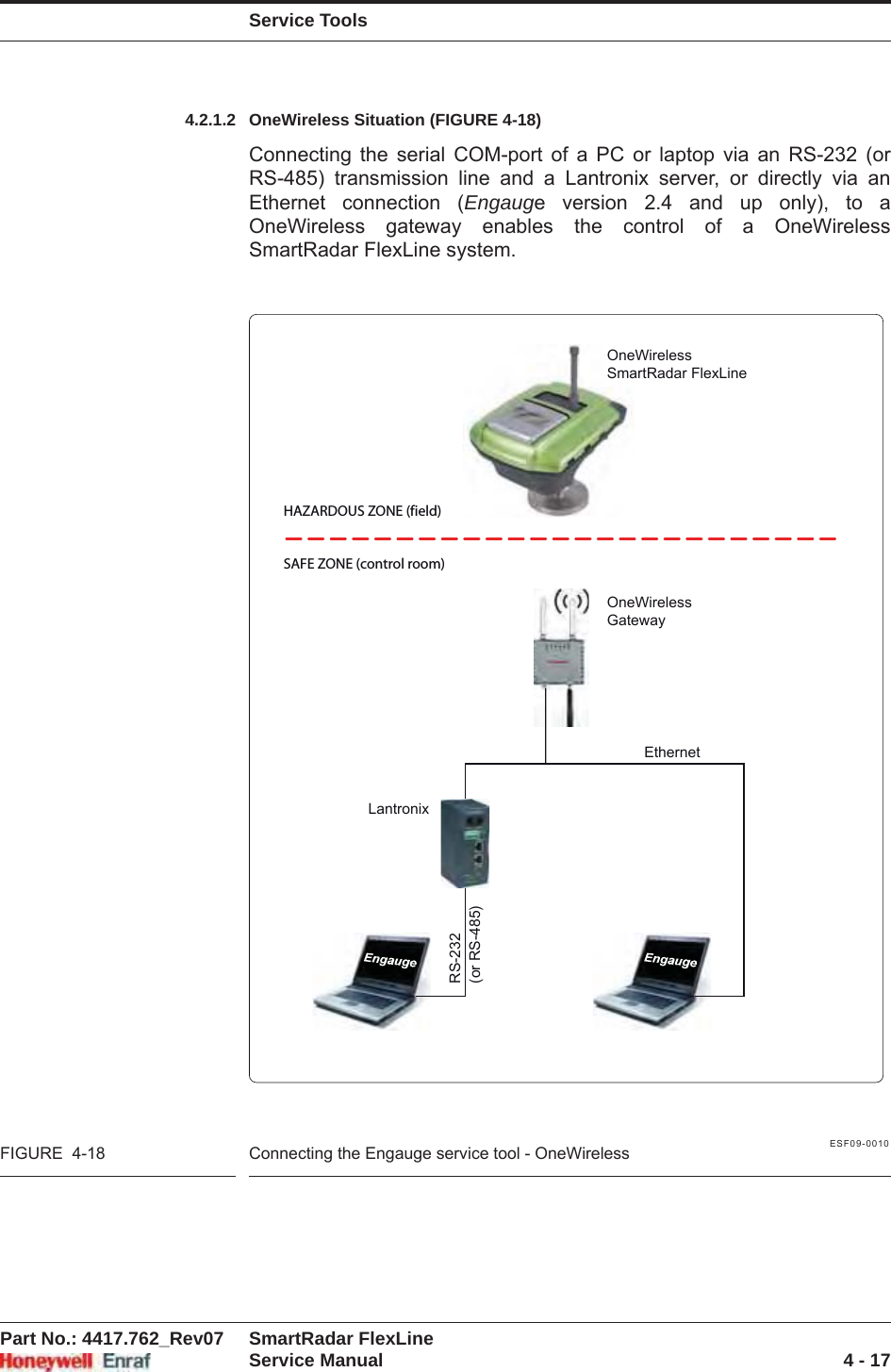
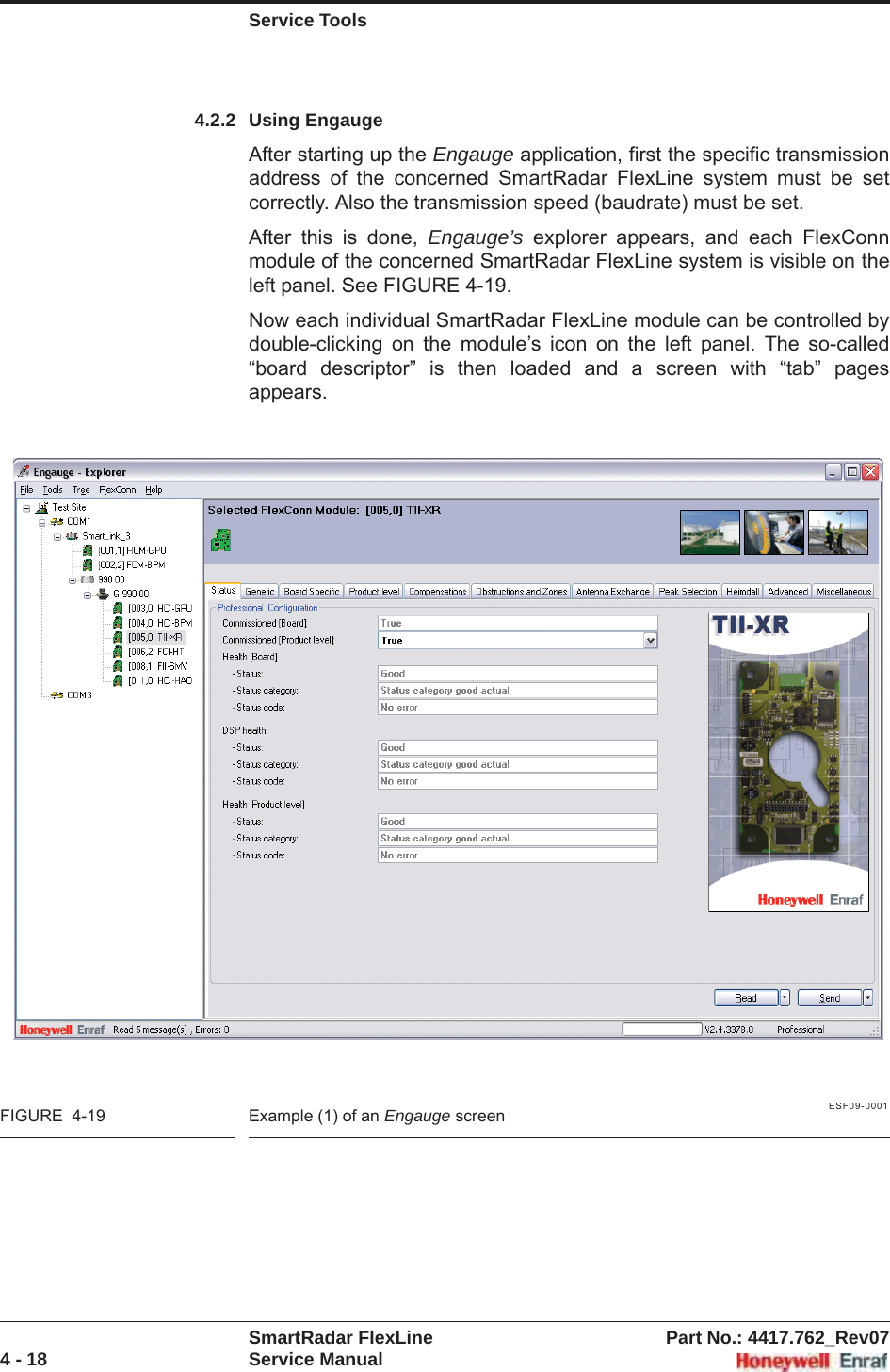
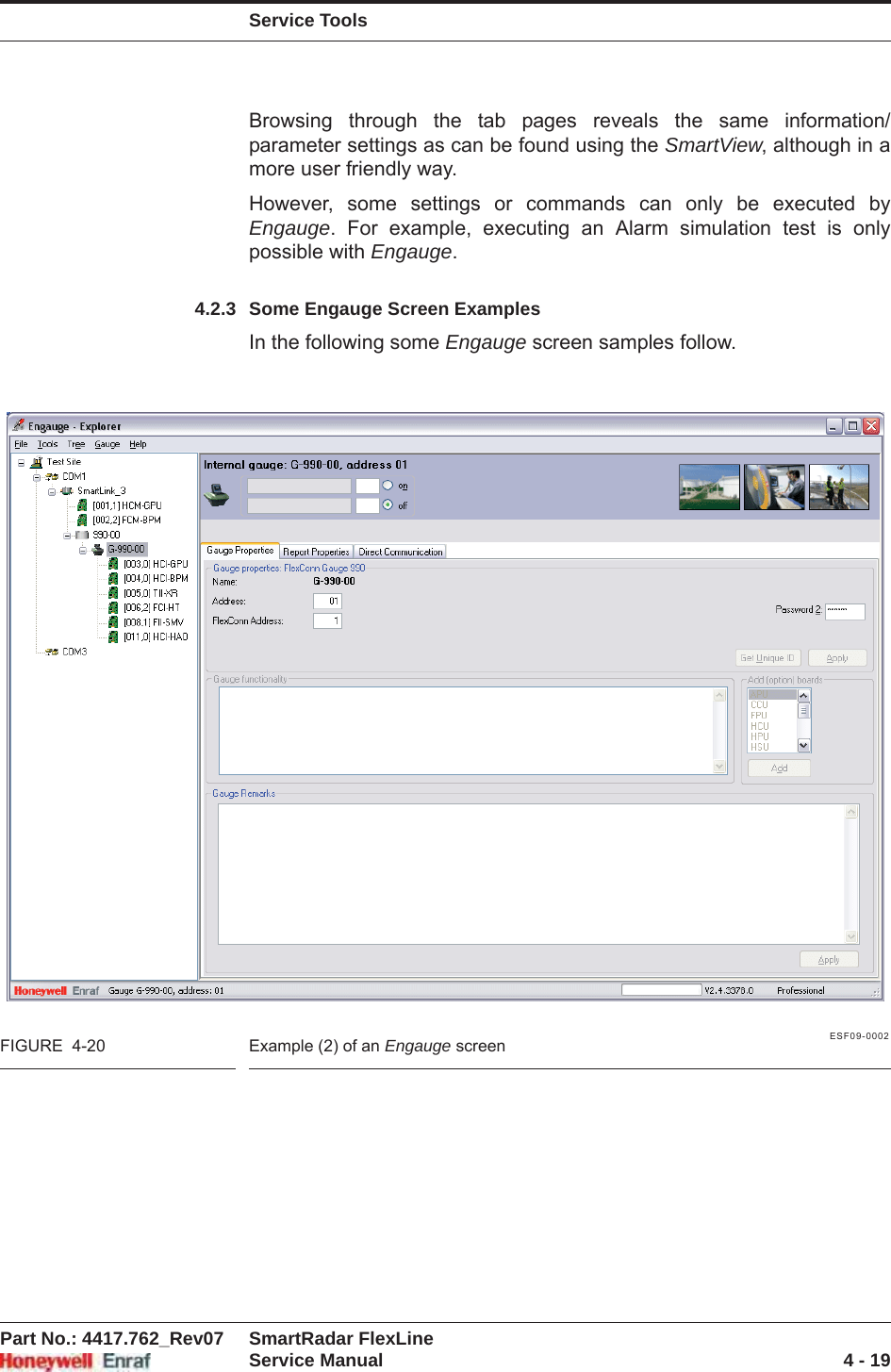
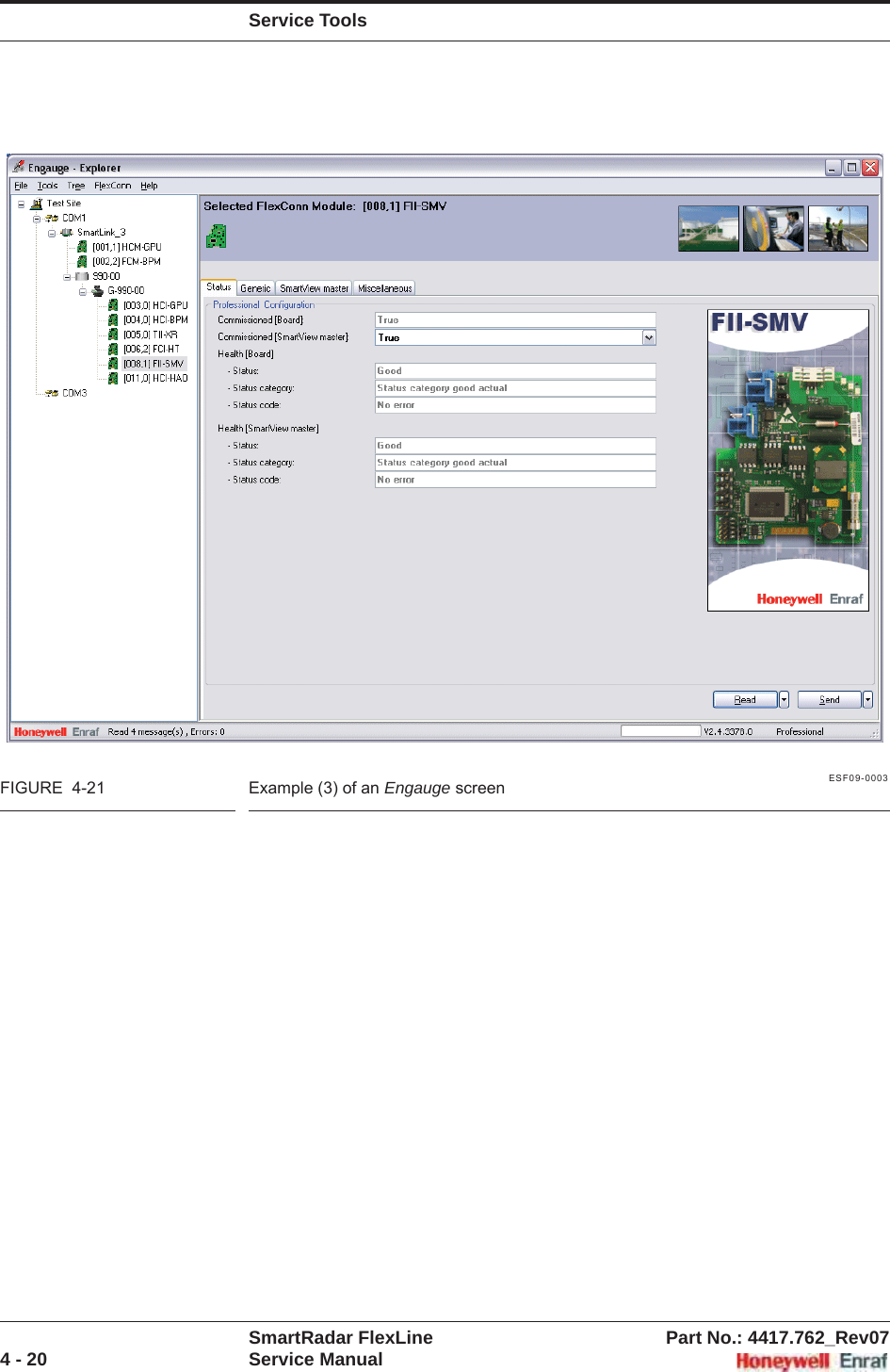
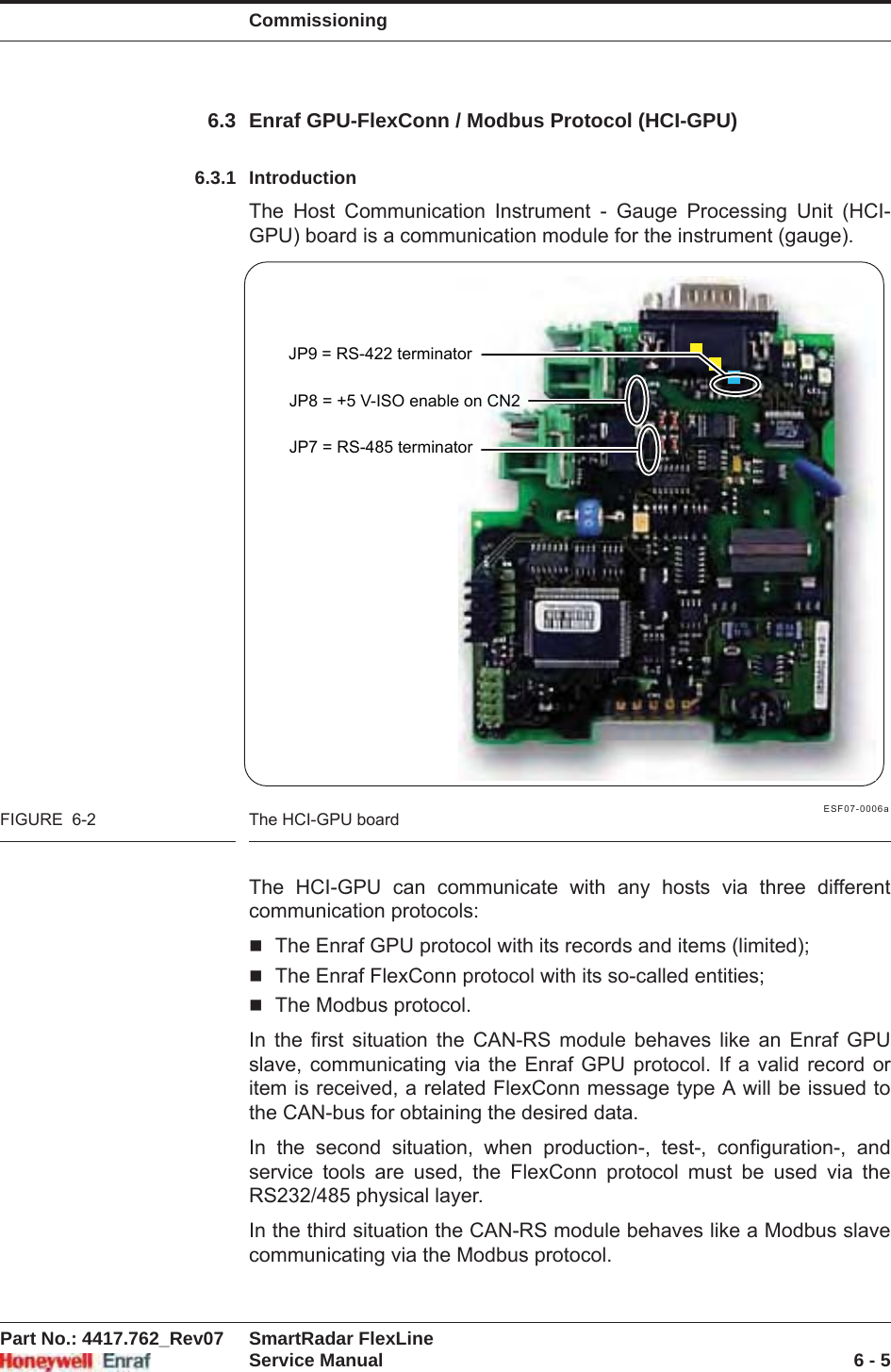
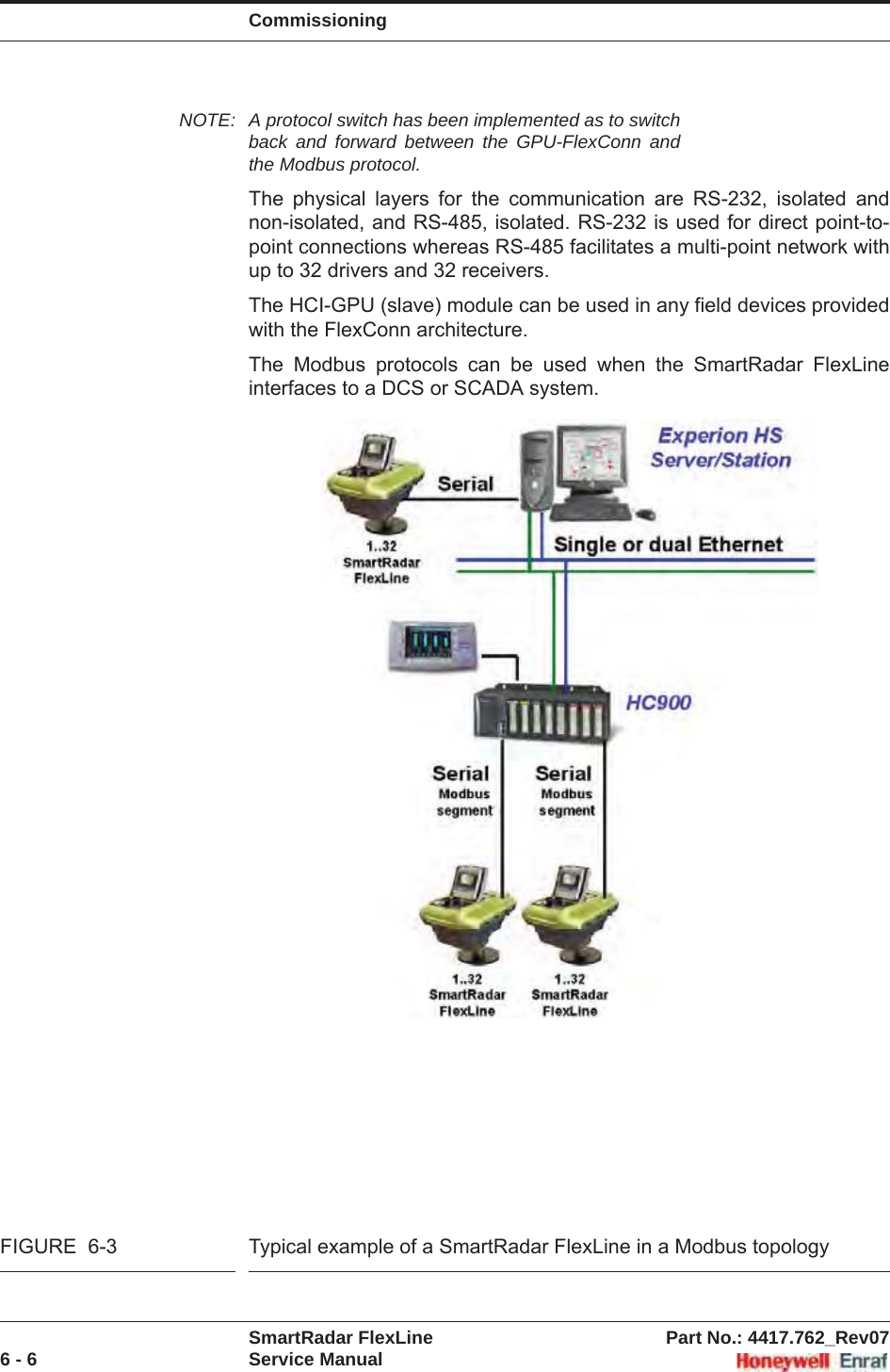
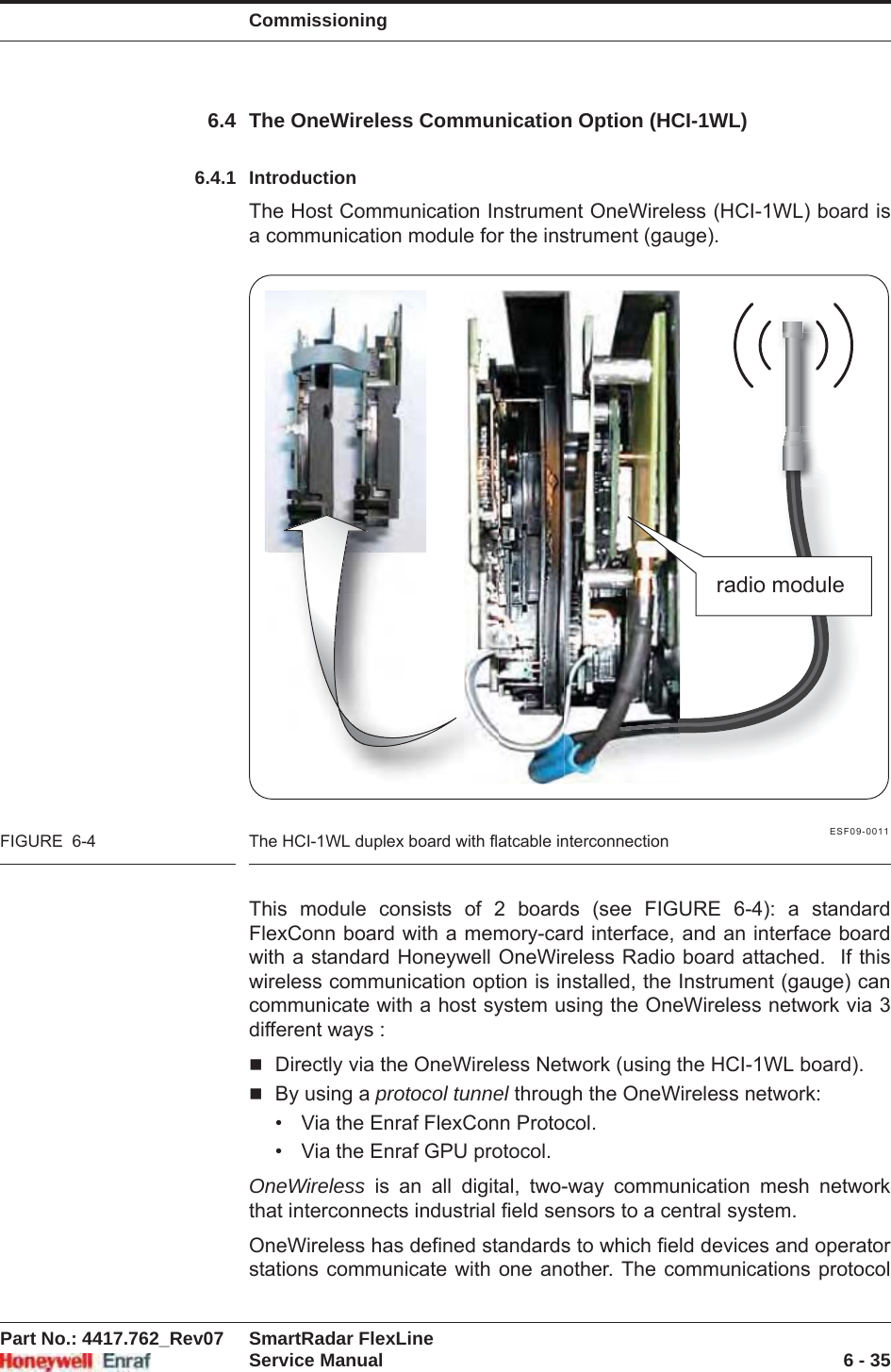
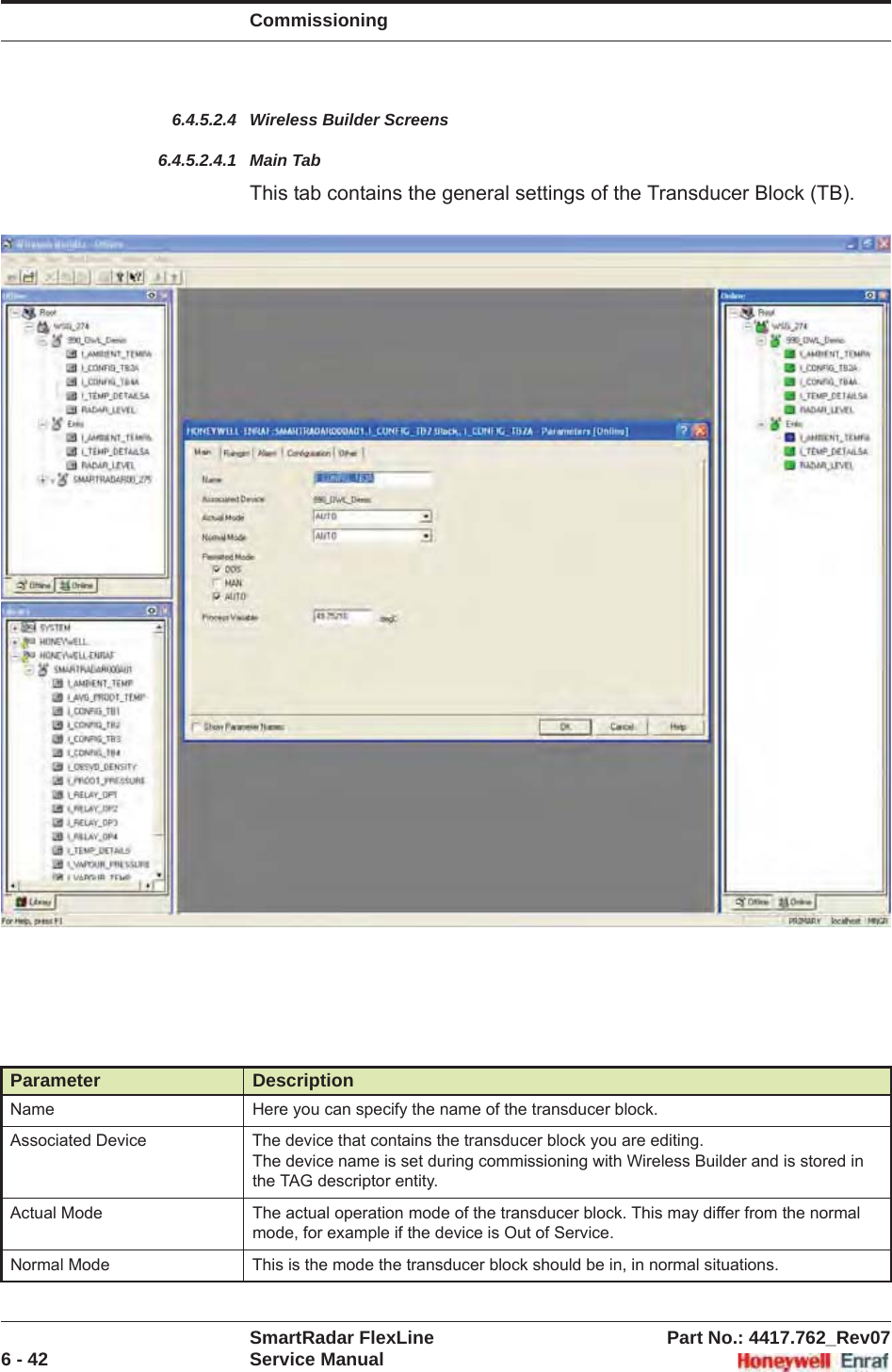
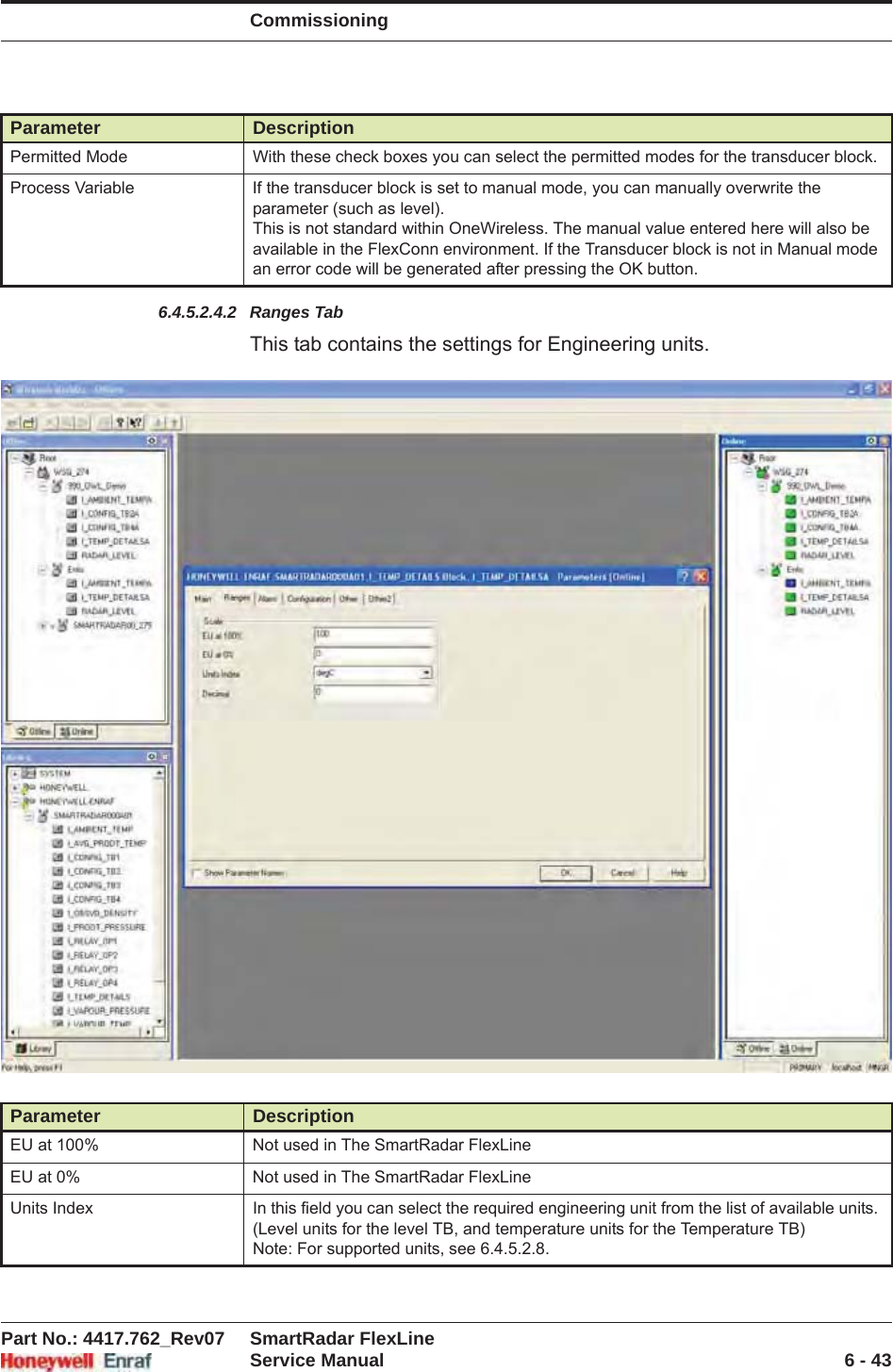
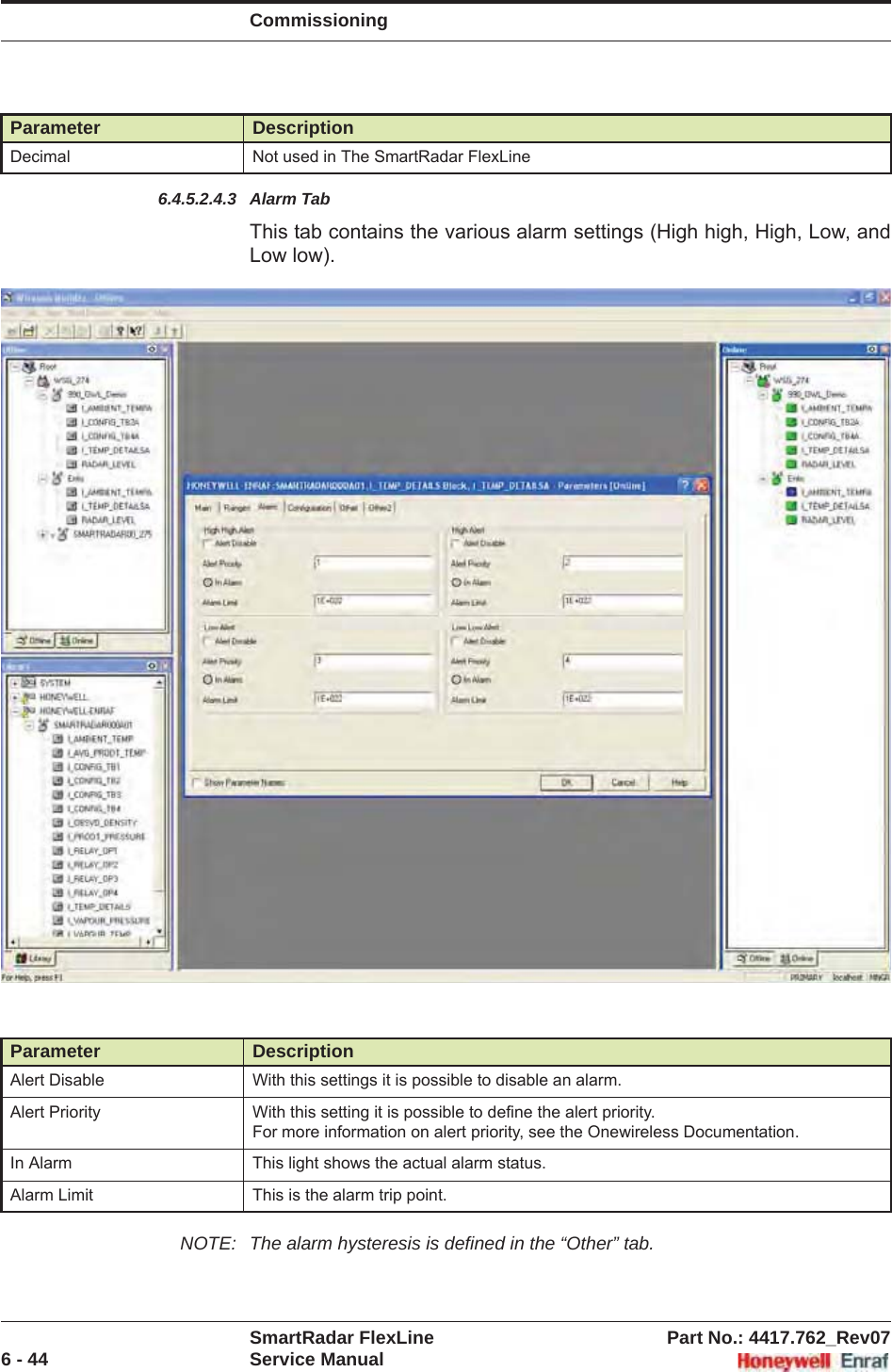
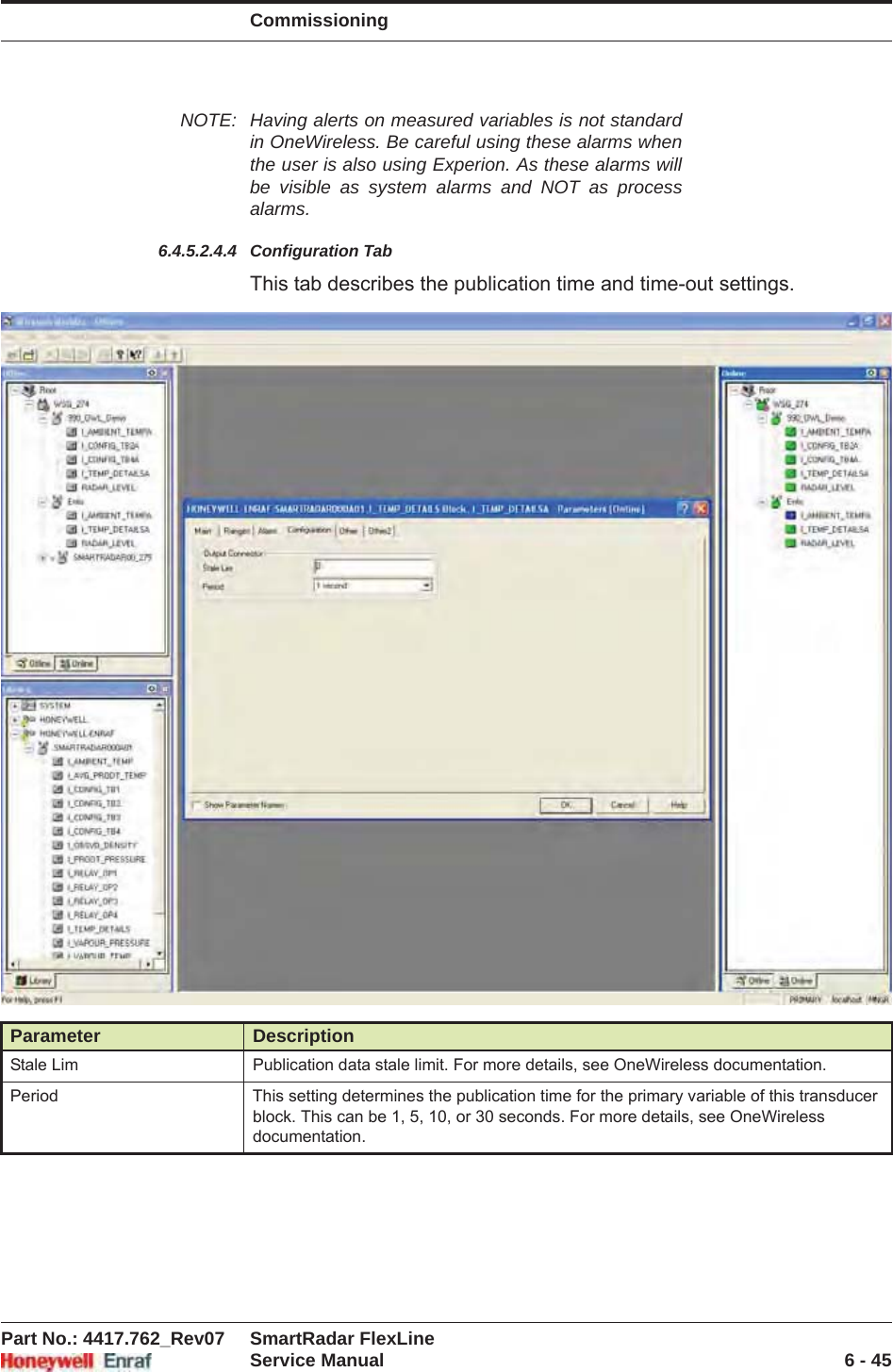
![GeneralPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 1 - 1CHAPTER 1 GENERAL1.1 Target Group for this Service ManualThis SmartRadar FlexLine Service Manual is meant for service engineers who are assigned to commission a SmartRadar FlexLine.1.2 Structure of this Manual1.3 Related DocumentsSmartRadar FlexLine Safety instructions for installation, commis-sioning, operation, and maintenance; shipped with the deviceInstallation Guide SmartRadar AntennasCE Declaration of Conformity [not available for OneWireless option]EC-Type Examination Certificate [not available for OneWireless option]IEC-Ex Certificate of Conformity [not available for OneWireless option]FCC AuthorizationControl drawings for FM and CSAOneWireless Wireless Builder User’s GuideOneWireless Key Server Manager User’s GuideChapter Title Contents Description1 - GENERAL This introductory manual part2 - SAFETY Here all safety-related information is housed. All essential and mandatory safety instructions, pre-cautions, and measures are described here. Moreover, the used safety conventions, the label-ling information, and compliance information can be found in this chapter.3 - SYSTEM ARCHITECTURE This chapter gives an introductory impression of the SmartRadar FlexLine’s modular-shaped hard-ware architecture.4 - SERVICE TOOLS In this chapter, both the SmartView and the Engauge service tool are described in more detail.5 - INSTALLATION To make sure the relevant module (s) is (are) properly installed, before starting with commis-sioning, only a reference is made here to the Installation Guide for the SmartRadar FlexLine.6 - COMMISSIONING This chapter gives all information needed for a proper commissioning of one or more SmartRadar FlexConn modules.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-9.png)

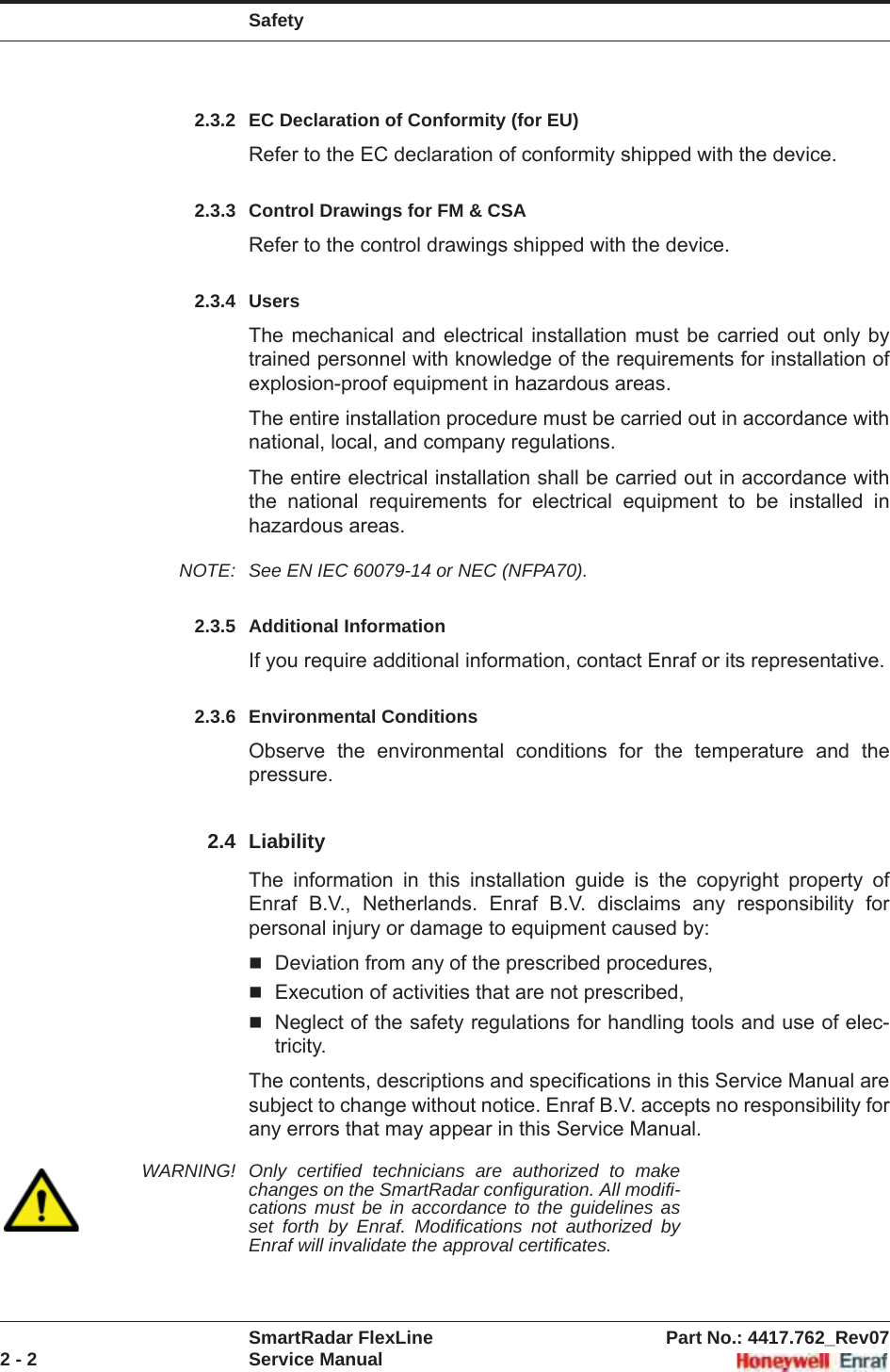
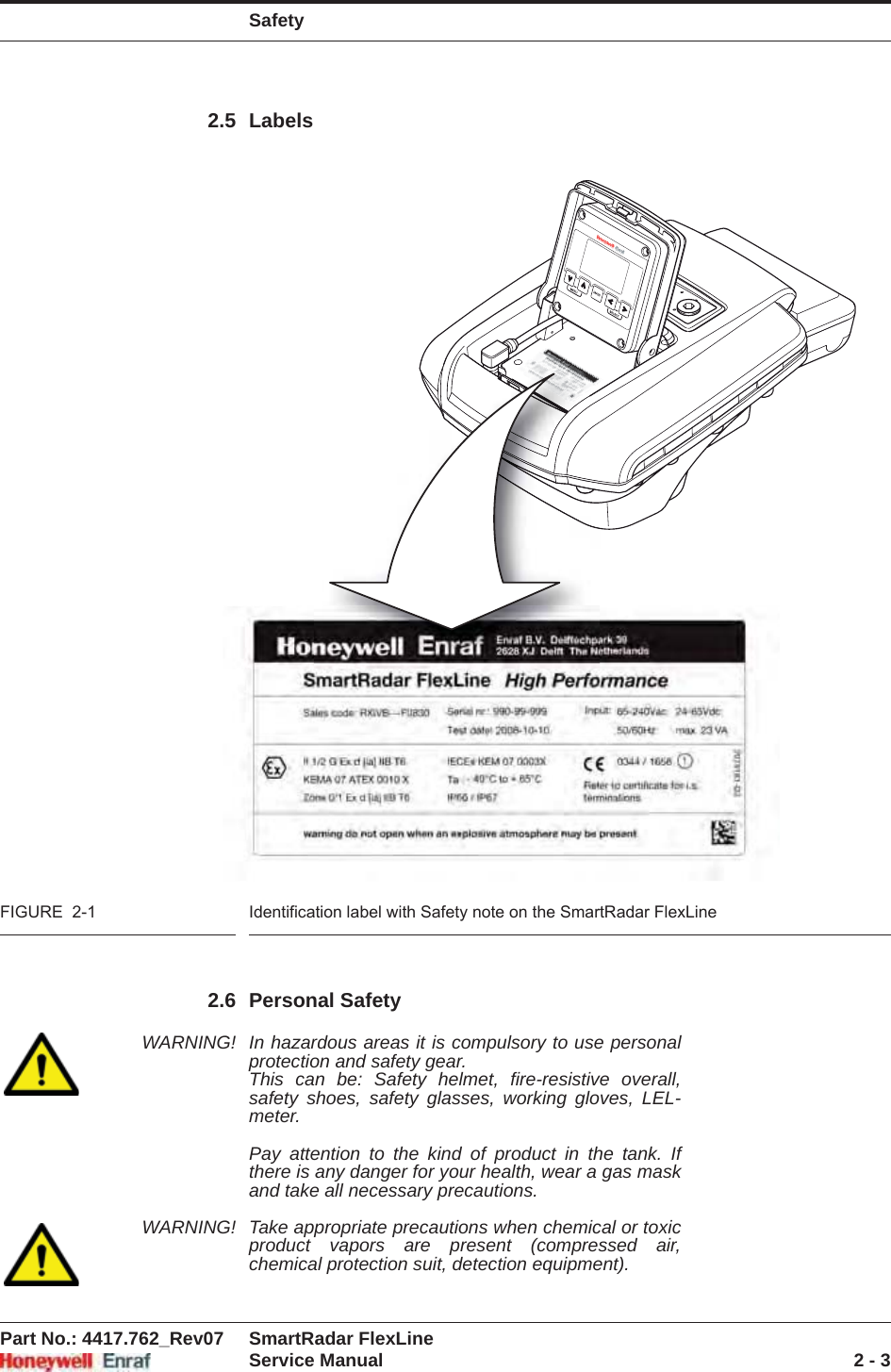
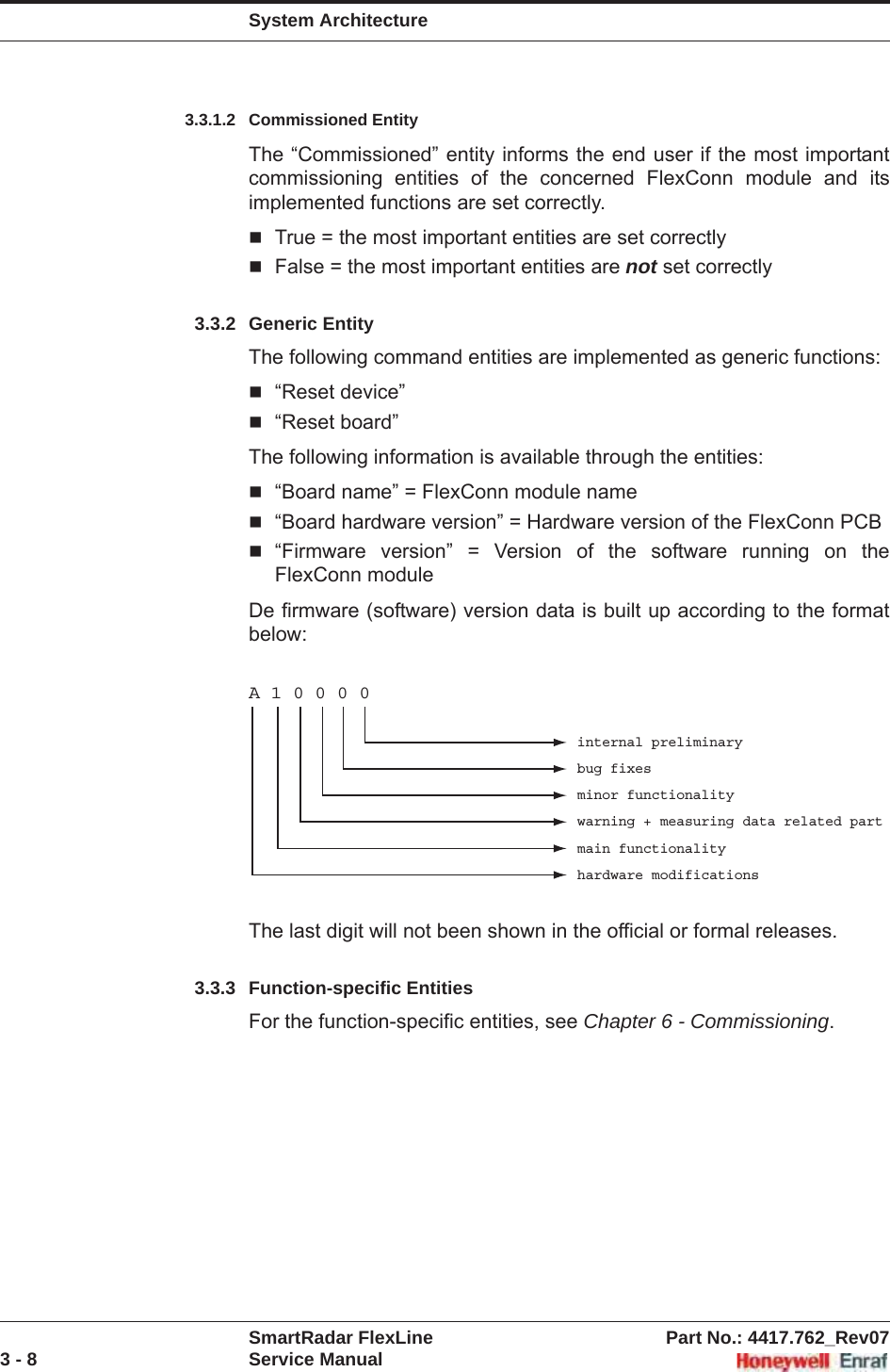
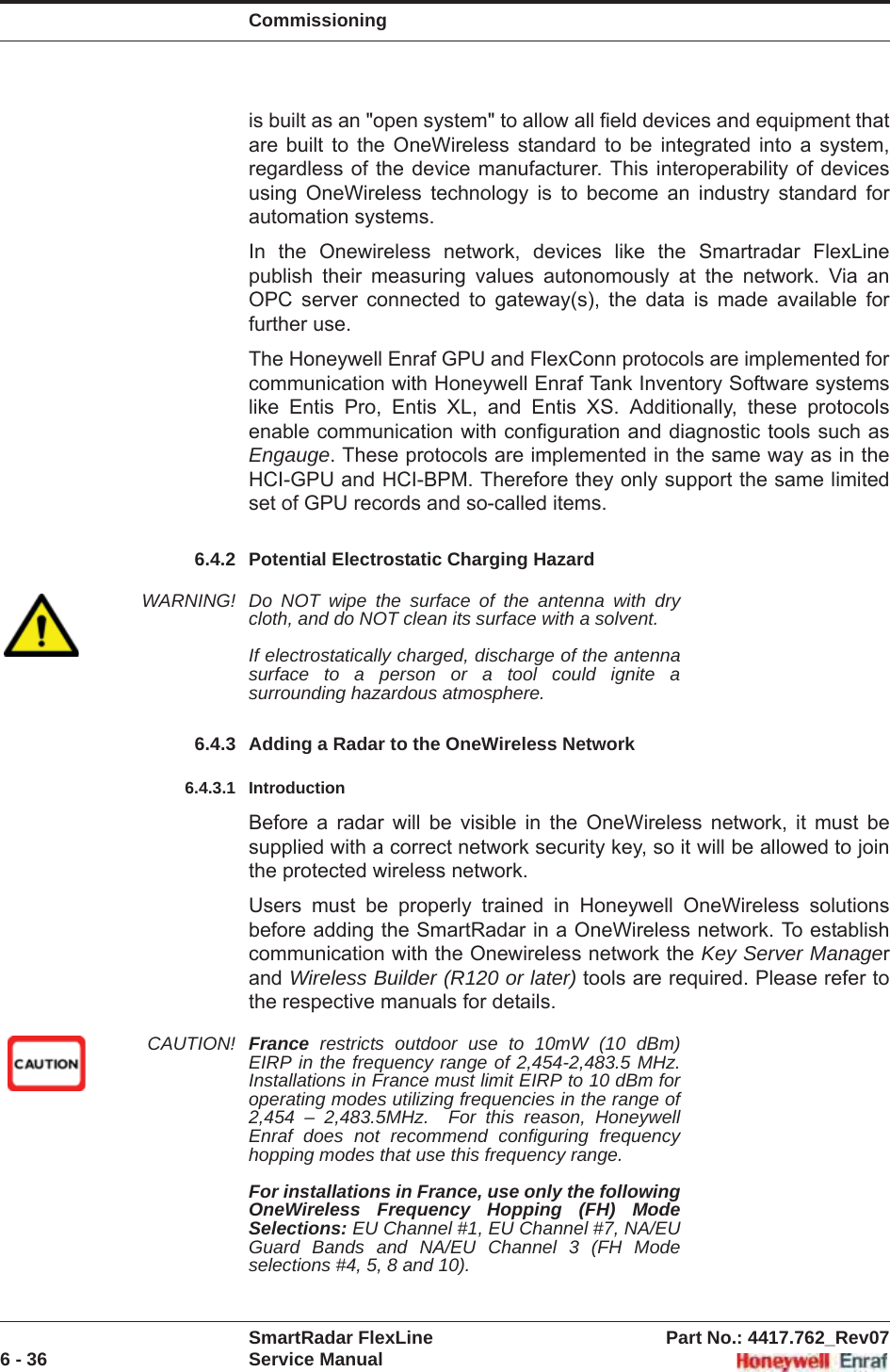
![SafetyPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 2 - 52.7.1.4.2 Safe ZoneWARNING! Avoid generation of static electricity. Make sure no explosive gas mixtures build up in the working area.2.7.1.5 Required SkillsWARNING! The technician must have technical skills to be able to safely install the equipment. The technician also must be trained to work in accordance with the national requirements for electrical equipment in hazardous areas.2.8 Electrical2.8.1 IEC Safety StandardsThe entire electrical installation must be in accordance with the Inter-national Standard EN IEC 60079-14 for electrical equipment in hazardous areas or with NEC (NFPA70) requirements.The stopping plugs, cable glands and reducers must be installed in accordance with appropriate IP requirementsUse explosion proof (Ex-d) compound barrier glands (due >2 litres IIB) in case of use without SmartConn (Ex-e junction box).Use increased safe (Ex-e) cable glands in case a SmartConn box is used.Improper installation of cable glands, conduits or stopping plugs will invalidate the Ex approval of this device.2.8.2 GroundingWARNING! Make sure the housing of the device is properly connected to the ground reference! Make sure that the electrical resistance of the ground connection is below the maximum of prescribed by local requirements!2.9 Accordance to Regulations2.9.1 Explosion Safety - Without SmartConnType of protection:ATEX / IEC Ex / CSA / FMCertificate numbers:ATEX / IEC Ex [pending for OneWireless option]SmartRadar FlexLine: KEMA 07ATEX0010X and IECEX KEM 07.0003 X.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-15.png)
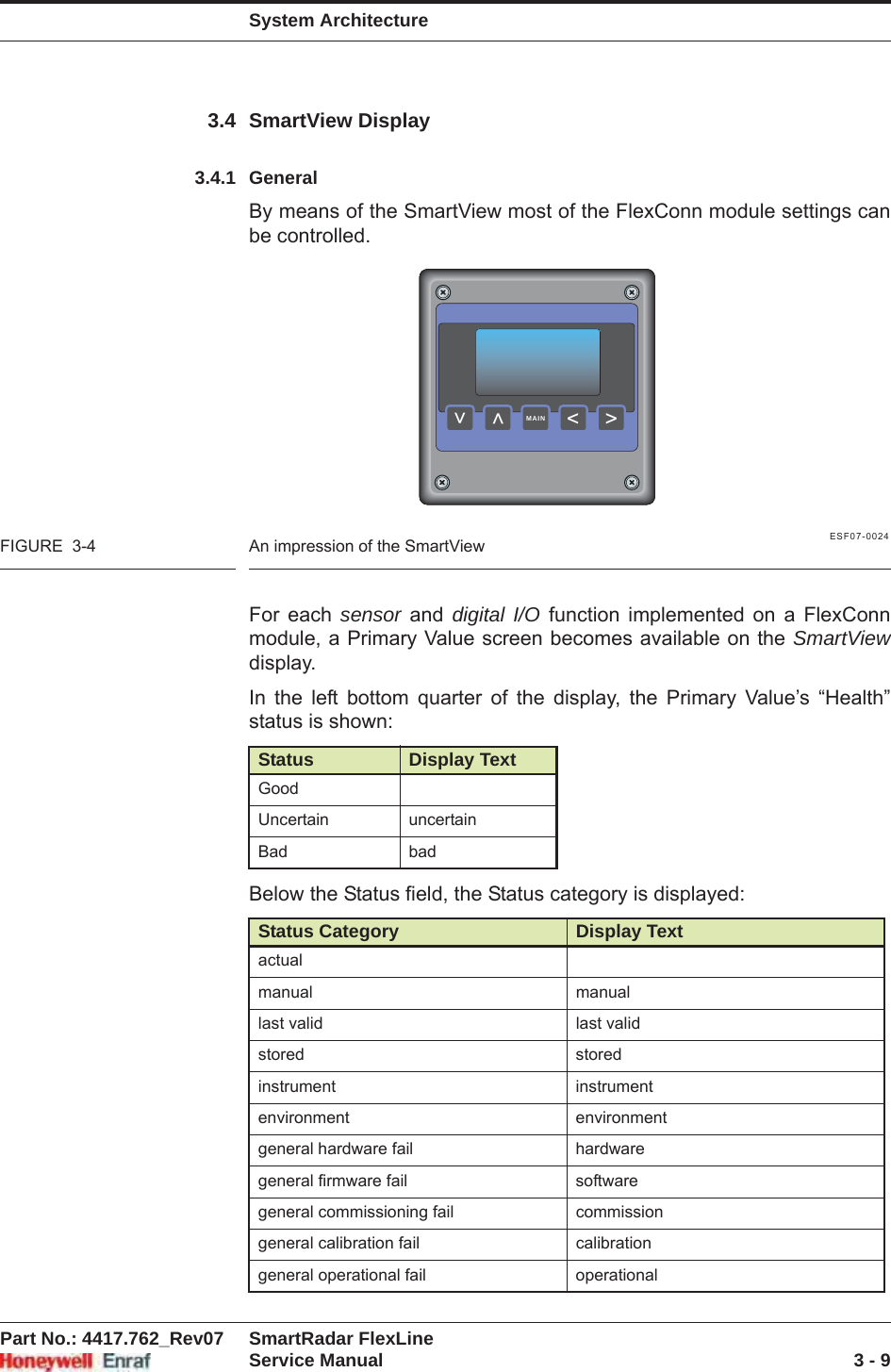
![SafetySmartRadar FlexLine Part No.: 4417.762_Rev072 - 6 Service ManualSmartView: KEMA 07ATEX0011X and IECEX KEM 07.0004 X.SmartConn: KEMA 07ATEX0093 and IECEX KEM 07.0031.Without SmartView: Ex d [ia] T6 Ta: -40 °C - +65 °C.With SmartView: Ex d [ia] ia T4 Ta: -25 °C - +65 °C.FM [including OneWireless option]Without SmartView:Class I DIV I group C,D T6 NEMA 4X Ta: -40 °C - +65 °C.With SmartView:Class I DIV I group C,D T4 NEMA 4X Ta: -25 °C - +65 °C.CSA [pending for OneWireless option]Without SmartView:Class I DIV I group C,D T6 NEMA 4X Ta: -40 °C - +65 °C.With SmartView:Class I DIV I group C,D T4 NEMA 4X Ta: -25 °C - +65 °C.2.9.2 Explosion Safety - With SmartConnType of protection:ATEX / IEC Ex / CSA [pending for OneWireless option]Without SmartView: Ex de [ia] T6 Ta: -40 °C - +65 °C.With SmartView: Ex de [ia] ia T4 Ta: -25 °C - +65 °C.2.9.3 Compliance to FCC, R&TTE, ICThis device complies with EN 302372 of the R&TTE Directive, Part 15 of the FCC Rules, and RSS-Gen of IC. The device does not cause harmful interference and accepts any interference received.WARNING! Changes or modifications made to this equipment not approved by Enraf B.V. invalidate the R&TTE/FCC/IC authorization to operate this equipment.CAUTION! This equipment has been tested. It complies with a Field disturbance sensor device, pursuant to Part 15 of the FCC Rules and FCC-Gen for IC. Operation is subject to the following two conditions: (1) this device may not cause interference, and (2) this device must accept any interference, including interference that may cause undesired operation of the device. These limits are designed to provide reasonable protection against harmful interference in a residential instal-lation. This device generates, uses and radiates radio frequency energy. If this device is not installed and used in accordance with the instructions, it can cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation.NOTE: This device is certified to measure liquid levels in metal, concrete or similar materials, enclosed tanks. 2.9.3 Compliance to radio communication equipment approvals 2.9.3.1 R&TTE (Radio & Telecommunication Terminal Equipment) This device complies with EN 302372 of the R&TTE Directive The device does not cause harmful interference and accepts any interference received. WARNING! Changes or modifications made to this equipment not approved by Enraf B.V. invalidate the R&TTE 2.9.3.2 FCC (Federal Communication Commission) FCC information: This device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions: 1. This device may not cause harmful interference, and 2. This device must accept any interference received, including interference that may cause undesired operation. Note: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures: --Reorient or relocate the receiving antenna. --Increase the separation between the equipment and receiver. --Connect the equipment into an outlet on a circuit different from that to which the receiver is connected. --Consult the dealer or an experienced radio/TV technician for help.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-16.png)

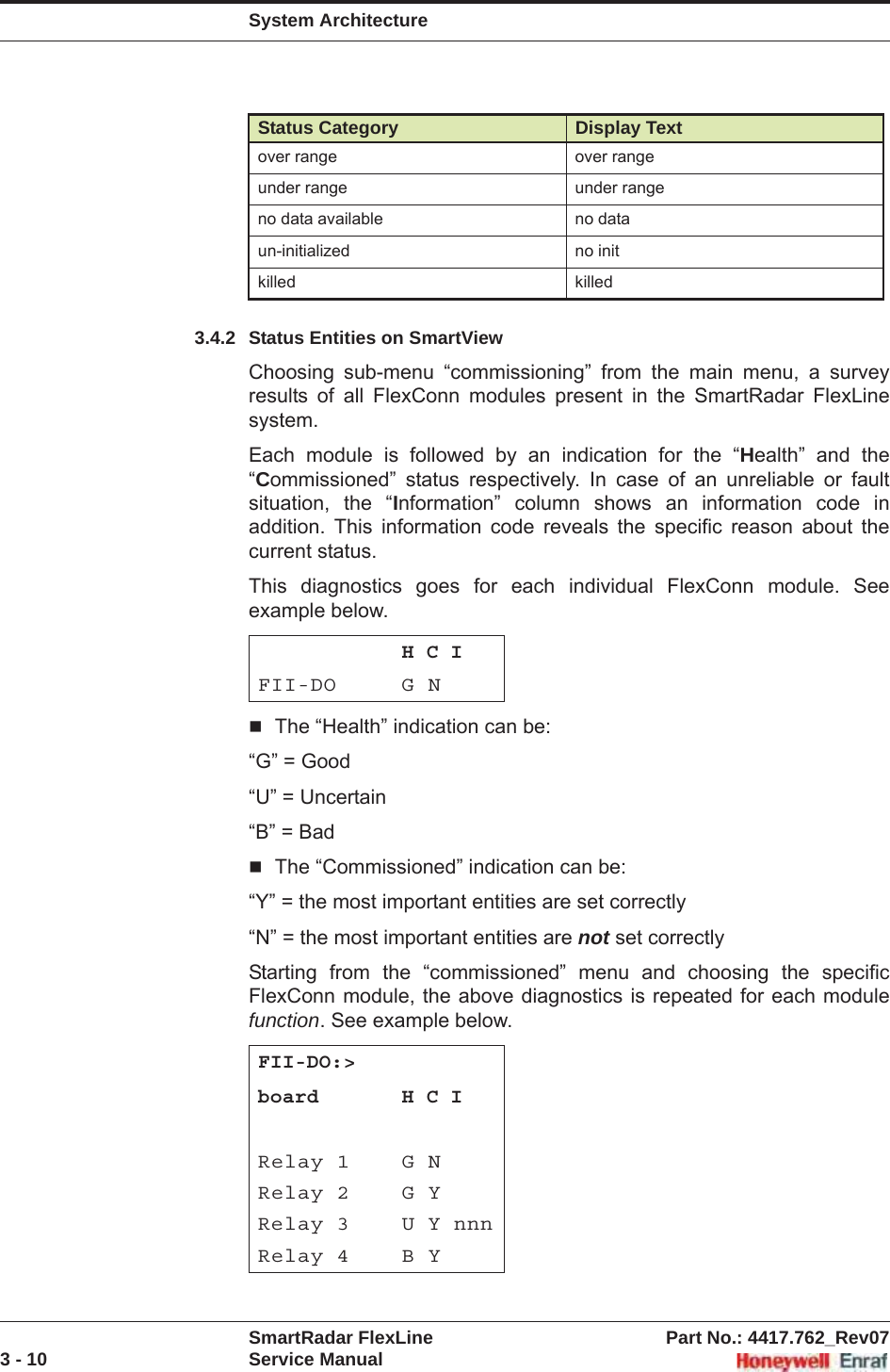

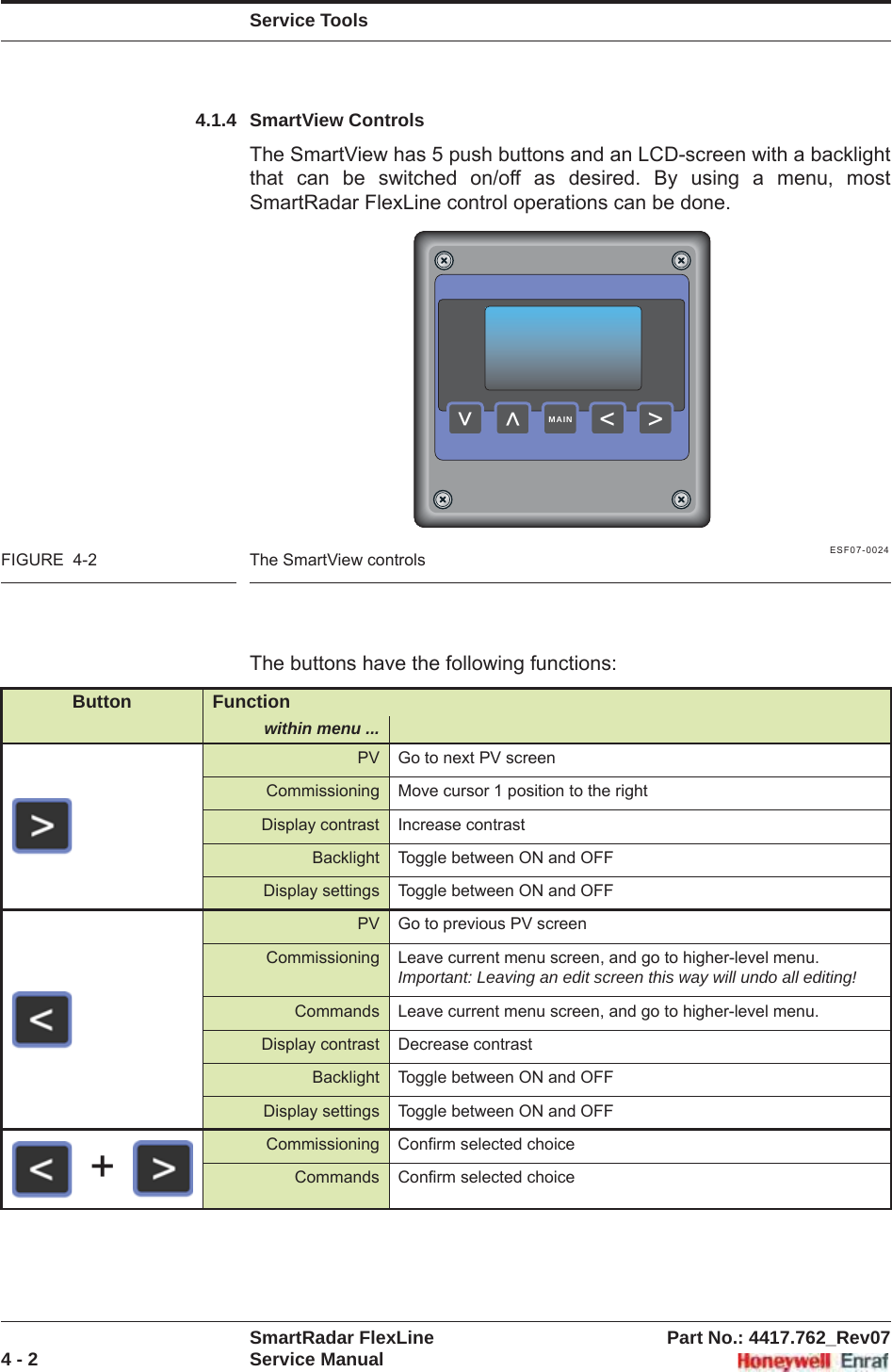
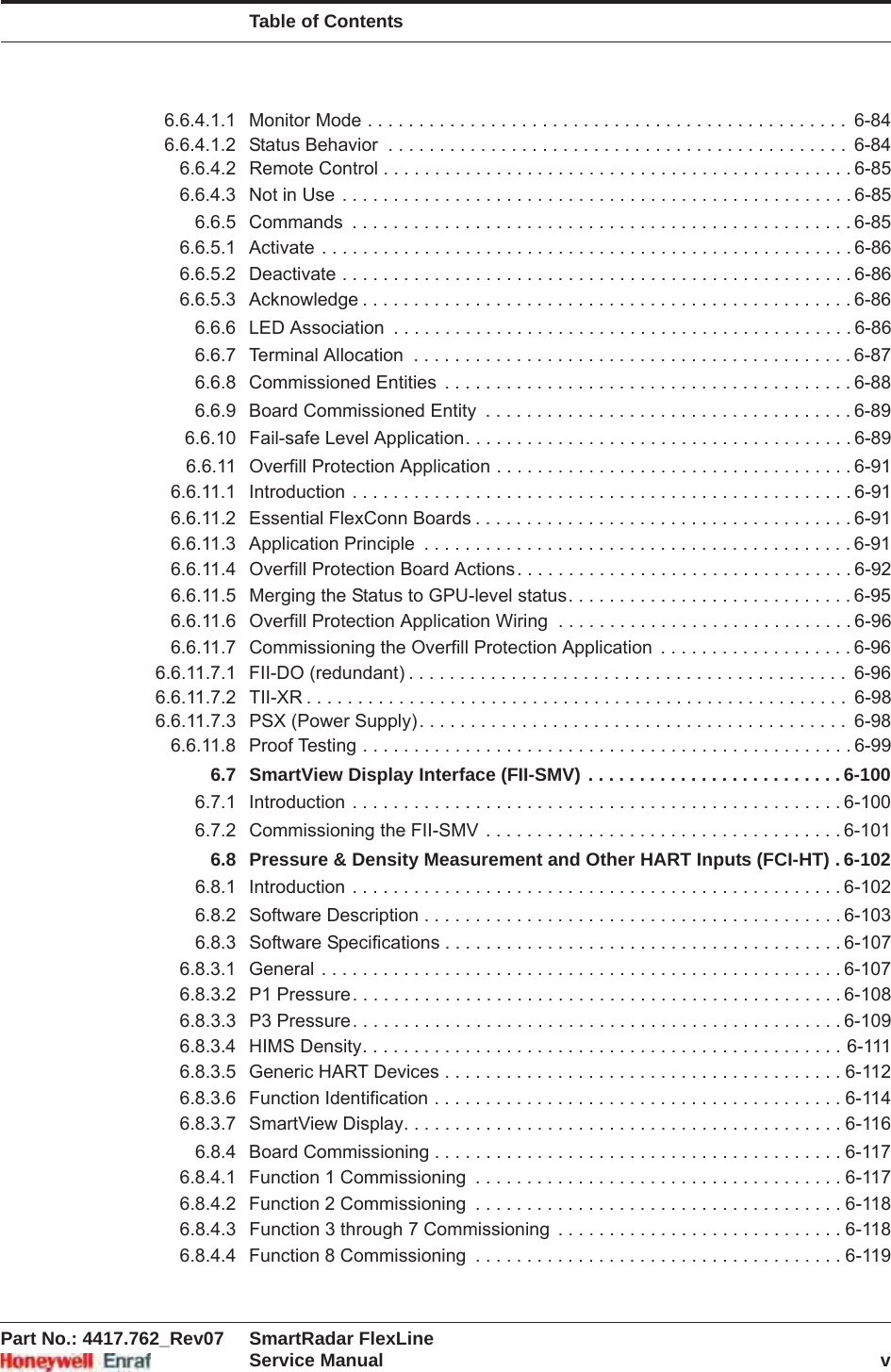
![Service ToolsPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 4 - 54.1.5.1.1 Start-up ScreenThe SmartView starts up showing:1. Black test2. Blank test3. Enraf logo + software version + tank ID4. PV screen4.1.5.1.2 Menu ScreenBy using the [menu] screen of the SmartView (see FIGURE 4-3) you can view and/or modify settings, or you can send a specific command to a sensor or a digital I/O board.ESF07-0030FIGURE 4-3 The menu screenMenu Item Description[menu] Screen title.[commissioning] Within this menu, configuration parameters can be set[commands] Allows you to send a command to a sensor or digital I/O board[display contrast] Allows you to adjust the display contrast[backlight] Allows you to switch ON or OFF the backlight[identification] Shows information about:xTank namexTank addressxCustomer IDxSmartView software versionxSmartView addressxFlexConn module name, board ID, board instance, and software version><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-37.png)
![Service ToolsSmartRadar FlexLine Part No.: 4417.762_Rev074 - 6 Service ManualTABLE 4-1 The menu items4.1.5.1.3 Backlight ScreenThe [backlight] screen (see FIGURE 4-4) allows you to enable/disable the backlight. The SmartView will only turn the backlight ON if following conditions are met:[backlight] is enabled by the host[backlight] is enabled by the userWhen the left or right button is pressed, the backlight setting immediately changes. The backlight setting is stored in non-volatile memory.ESF07-0031FIGURE 4-4 The backlight screen[display settings] Allows you to switch ON/OFF buttons time-out:xMain screen: If no button is pressed within 15 minutes, SmartView switches to PV screenxStandby mode: If no button is pressed within 15 minutes, SmartView switches to standby mode[display test] Performs blank/black test[extra information] The [extra information] screen shows information about a specific function. See also 4.1.5.1.8.Menu Item Description><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-38.png)
![Service ToolsPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 4 - 74.1.5.1.4 Display Contrast ScreenThe [display contrast] screen (see FIGURE 4-5) displays a horizontal scroll bar. By moving the scroll bar, you can adjust the contrast. Moving to the right immediately increases contrast, moving to the left decreases contrast.ESF07-0032FIGURE 4-5 The display contrast screen4.1.5.1.5 Display Settings ScreenThe [display settings] screen allows you to set the buttons time-outs. The screen displays the following items:4.1.5.1.6 Display Test ScreenWhen the [display test] screen is selected, SmartView performs a black/blank test. SmartView begins drawing a rectangle of 64 x 128 pixels, filled with black pixels for a period of 2s. After that, the screen is cleared using a rectangle filled with white pixels for a period of 2s.Feature Possible States DefaultButtons time-out to main screen ON/OFF ONButtons time-out to standby mode ON/OFF ON><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-39.png)
![Service ToolsSmartRadar FlexLine Part No.: 4417.762_Rev074 - 8 Service Manual4.1.5.1.7 Identification ScreenThe [identification] screen (see examples in FIGURE 4-6) allows you to scroll through the available FlexConn modules, using the up and down buttons, to obtain information about:SmartView (see left screen)· the tank name· the tank address· software version· SmartView address· customer IDFlexConn modules (see right screen)· board name· board ID· instance· software versionESF07-0033 + 0029FIGURE 4-6 Identification screen examples><<<MAIN><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-40.png)
![Service ToolsPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 4 - 94.1.5.1.8 Extra Information ScreenThe [extra information] mode can be configured to show either the [level & temperature] screen or the [extra information] screen (see FIGURE 4-7). The [extra information] screen shows information about a specific function. The specific functions are described in chapter 6. The [level & temperature]screen (see FIGURE 4-7) shows information about the measured product level and temperature. In this menu mode, it is not possible to change any settings.NOTE: In case of an error situation, the level fields are filled with “#” and the temperature fields with “9”.ESF07-0039/0012FIGURE 4-7 The level & temperature screen (left) and the extra information screen (right)4.1.5.1.9 Primary Value ScreenThe [Primary Value] screen (PV-screen), shown in FIGURE 4-8, depicts information about data measured by a sensor, or information about the status of a digital I/O. See table TABLE 4-2.ESF07-0028 + 0044FIGURE 4-8 PV-screen examples (left: level status, right: digital I/O status)><<<MAIN><<<MAIN><<<MAIN><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-41.png)
![Service ToolsSmartRadar FlexLine Part No.: 4417.762_Rev074 - 10 Service ManualTABLE 4-2 Primary Value (PV) itemsData Field Max. Size [characters] DescriptionPrimary Value 9 The measured value, e.g. +025.1277PV identification 13 Quantity name, e.g.xProduct levelxProduct temperaturexP1 pressurePV units 5 Quantity unit, e.g.xmxkg/m3xkPaPV type 3 Type can be:xINN (innage)xULL (ullage)xREL (relative)xABS (absolute)PV health 9 Status of the Primary Value:xUNCERTAINxBADPV representation 15 Representation of the PV:xManualxLast validxStoredxInstrumentxEnvironmentxHardwarexSoftwarexCommissionxCalibrationxOperationalxNo dataxNo init.xKilledxOver rangexUnder rangePV alarms 9 Alarm type that occurred:xHigh HighxHighxLowxLow LowTank identification 8 Tank name, e.g. CRUDE 07Alive indicator 1 Blinking cursor (bottom right) indicates PV being updated](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-42.png)
![Service ToolsPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 4 - 11REMARKS: 1. In error situation, the data fields are filled with “#”.2. SmartView will enter standby mode when the communication with the host is lost.3. The data fields PV health, PV representation, andPV alarms are only visible if they are applicable.4.1.5.1.10 Password ScreenThe [commands] and [commissioning] menus are password-protected. The [password] screen (see FIGURE 4-9) appears when you enter the [commands] or the [commissioning] menu.Once the password is entered correctly (only once will do for both menu entries), you can change the values. 15 minutes after the last button was pressed, the password needs to be re-entered.ESF07-0040FIGURE 4-9 The password screen><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-43.png)
![Service ToolsSmartRadar FlexLine Part No.: 4417.762_Rev074 - 12 Service Manual4.1.5.1.11 Commands Menu ScreensThe [commands] menu starts with the [board list] screen (see FIGURE 4-10).You can navigate through the board list by using the up and down buttons. A board can be selected by simultaneously pressing the left + right button.ESF07-0034FIGURE 4-10 The board list screenThe [function list] screen (see FIGURE 4-11) shows all availablefunctions of the previously selected board. You can navigate through the function list by using the up and down buttons. You can return to the [board list] screen by pressing the left button. A function can be selected by simultaneously pressing the left + right button. If a FlexConn module does not contain any function commands, this will be indicated in the list (<no cmd>).ESF07-0045FIGURE 4-11 The function list screenOn selection of an available function, the [command list] screen is presented (see FIGURE 4-12). You can navigate through the ><<<MAIN><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-44.png)
![Service ToolsPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 4 - 13function list by using the up or down button. A command can be selected by simultaneously pressing the left + right button. You can return to the [function list] screen by pressing the left button.ESF07-0035FIGURE 4-12 The command list screen4.1.5.1.12 Commissioning Menu ScreenThe [commissioning] menu starts with the [board list] screen (see FIGURE 4-13).You can navigate through the board list by using the up or down button. A board can be selected by simultaneously pressing the left + right button.ESF07-0036FIGURE 4-13 The board list screen (commissioning)><<<MAIN><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-45.png)
![Service ToolsSmartRadar FlexLine Part No.: 4417.762_Rev074 - 14 Service ManualThe [function list] screen (see FIGURE 4-14) displays all configurable entities of a function. The actual entity value is visible as well.You can navigate through the board list by using the up or down button. A function can be selected by simultaneously pressing the left + right button. You can return to the [board list] screen by pressing the left button.ESF07-0046FIGURE 4-14 The function list screen (commissioning)On selection of an available function, the [entity list] screen is presented (see FIGURE 4-15). You can navigate through the entity list by using the up or down button. An entity can be selected by simultaneously pressing the left + right button. You can return to the [function list] screen by pressing the left button.ESF07-0047FIGURE 4-15 The entity list screen><<<MAIN><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-46.png)
![Service ToolsPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 4 - 15On selection of an available entity, the [value edit] screen is presented (see FIGURE 4-16).· If an invalid value is entered, the message “value out of range” will be displayed.· If the value is not accepted by the FlexConn module, the message “value not accepted” will be displayed.· You can scroll along the characters by push and hold the up button.· An entity modification is only executed on simultaneously pressing the left + right button. After this, first a range check is done. If the modification is accepted, you will be returned to the [value edit] screen.· The cursor can be shift to the right by pressing the right button.· You can return to the [entity list] screen by pressing the left button.NOTE: By using the left button to return to the [entity list]screen without executing the modification(s) by pressing the left + right button simultaneously will undo this (these) modification(s)!ESF07-0037FIGURE 4-16 Examples of the value edit screen><<<MAIN><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-47.png)

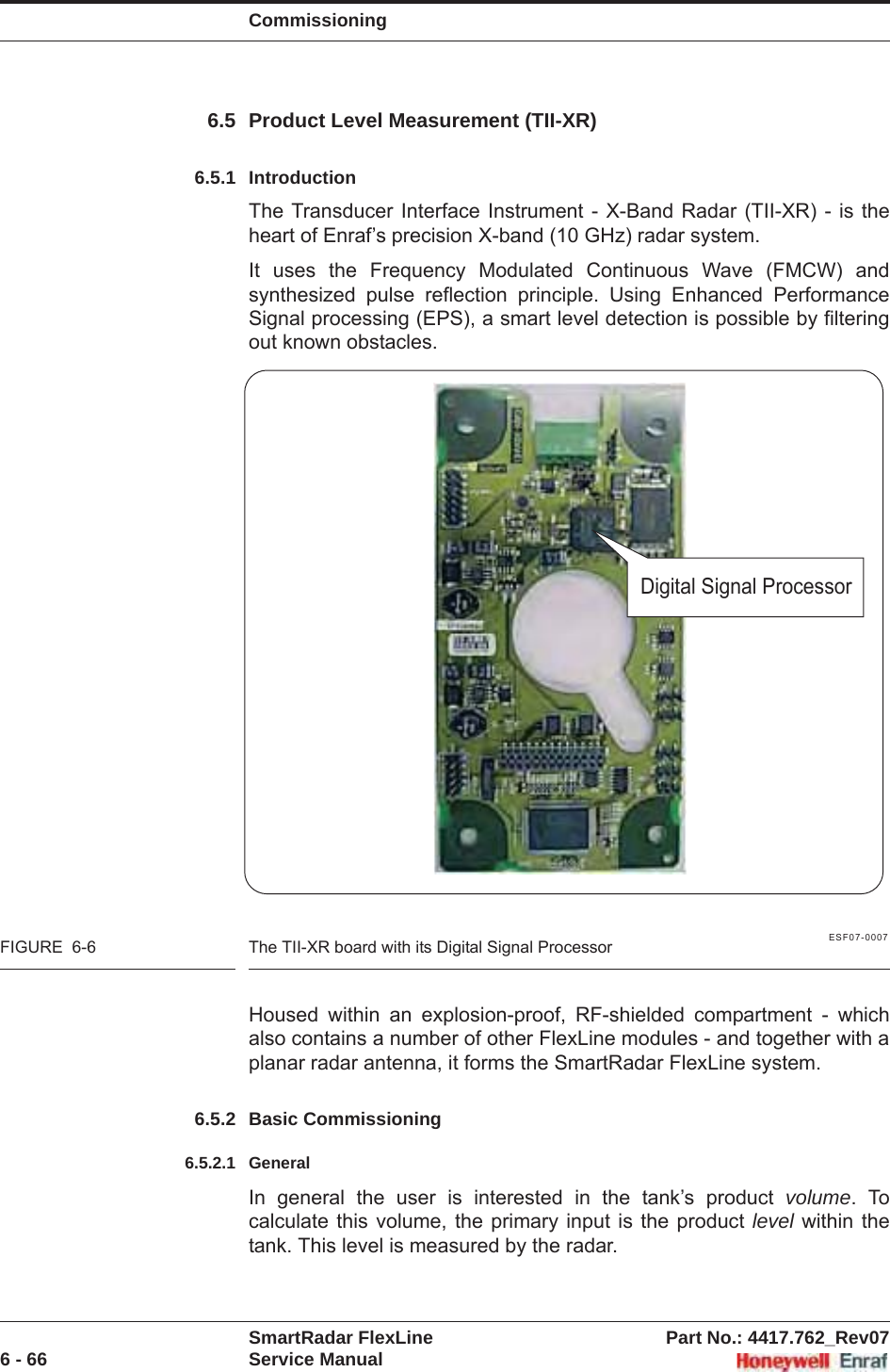
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 1CHAPTER 6 COMMISSIONING6.1 General6.1.1 IntroductionThis chapter gives an overview of the commissioning information per FlexConn module.NOTE: Not all modules are always present.Commissioning a FlexConn module is done by setting software parameters, the so-called entities (see Chapter 3), to the desired specific values. This can either be done by using Engauge orSmartView (see Chapter 4).6.1.2 Text ConventionsIn contrast with explanatory text, all instruction text will be preceded by a☛.All [Entity] and <entity-related> text is recognizable formatted. When - for instance - all required FlexConn module entities are commissioned, the [Board Commissioned] entity will display <True>. If not, it will display <False>.All !Command! text is also recognizable formatted, If - for instance - an !Activate! command is given, the result will be <Activated>.In this chapter, each commissioning-instruction text is recognizable by the Engauge/SmartView icon in the margin.When a commissioning instruction or command cannot be initiated by SmartView, the icon will be given.When a commissioning instruction or command can only be initiated via SmartView, the SmartView-only button is visible (left).In some cases the Wireless Builder and/or the Key Server Managerapplication(s) are used. This is indicated by a corresponding button (left).WirelessBuilderKey ServerManager](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-57.png)
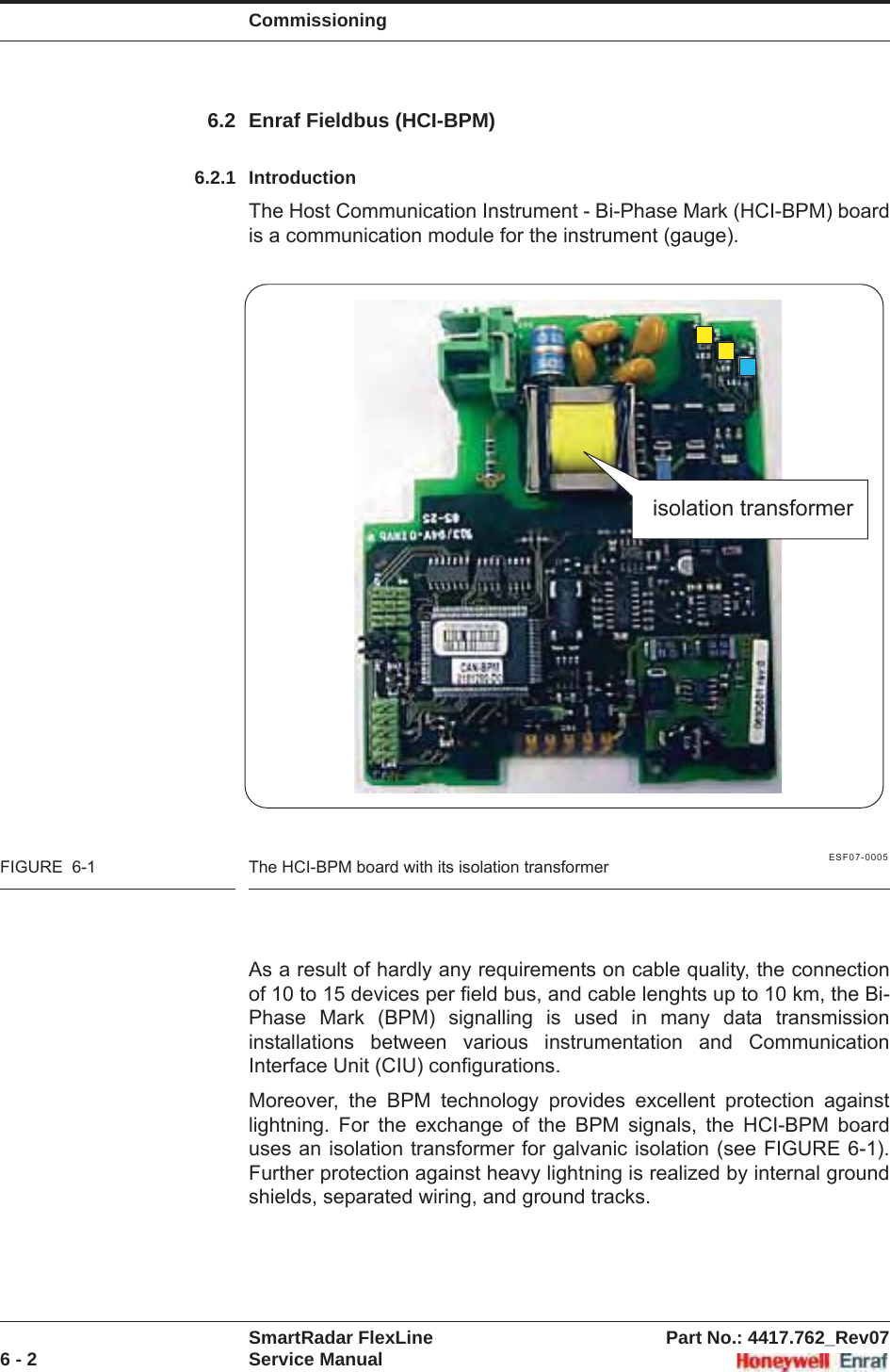
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 3The HCI-BPM module supports 2 protocols:The Enraf GPU protocol with its records and items (limited);The Enraf FlexConn protocol with its so-called entities.The module can communicate with:880 CIU prime858 CIU780 SmartLink6.2.2 Commissioning the HCI-BPMFor a correct functioning of the HCI-BPM module within an instrument (gauge), the following entities can be set by using either Engauge or SmartView.☛By using the following table, check each entity for correctness.Name Value Range Default Value Explanation[Baudrate] <1200><2400><4800><1200> Communication speed[BPM sensitivity] <1..8> <8> The sensitivity of the receiver circuit1 = weakest8 = strongest[Identification] 8 characters e.g.<TANK1234><--------> Name of a tank or instrument[GPU instrument address] <0..99> <0> The address of this instrument for GPU messages.Note: Each instrument must have a unique GPU address.[FlexConn instrument address] <0..1899> <0> The address of this instrument for FlexConn messages.Note: Each instrument must have a unique FlexConn address.[Level units] <meters><inches><feet><fractions><meters> The unit in which level-related GPU records and items are shown[Temperature units] <celsius><fahrenheit><celsius> The unit in which temperature-related GPU records and items are shown](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-59.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 4 Service Manual☛After having checked/set all before listed entities, make surethe [Board Commissioned] and the [BPM slave Commissioned] entities are <True>;the [Board Health] and the [BPM slave Health] entities are <GOOD>.[Pressure units] <pascal><kilo pascal><psi small> (2 digits before separator)<psi large> (3 digits before separator)<pascal> The unit in which pressure-related GPU records and items are shown[Density units] <kilogram m3><degrees API><pounds ft3><kilogram m3> The unit in which density-related GPU records and items are shown[Decimal separator] <point><comma><point> The decimal separator in which GPU-related records and items are shown[Level type] <innage><ullage><innage> The level-related GPU records and items can be shown as an innage or ullage.Note:•Innage is the level of the product measured from the bottom.•Ullage is the level of free space from the roof till the product.[Password] <......> 6 characters <ENRAF2> Password for entering the protected level.Note: Some settings reside under the protected level.[Function identification] <......> 13 characters <BPM-slave> The name of the current function of this module. This name is visible on the SmartView display.Name Value Range Default Value Explanation](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-60.png)
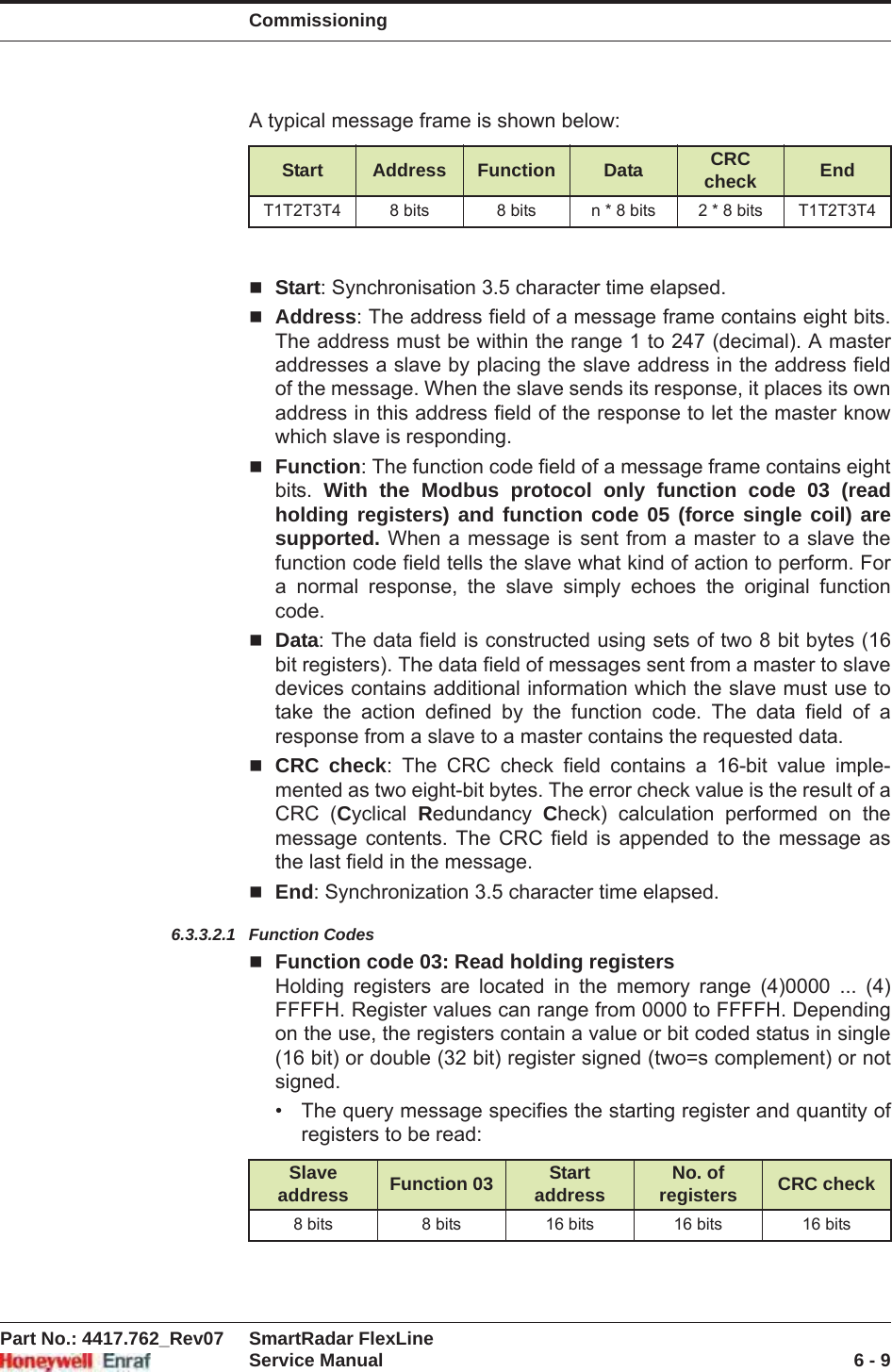
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 12 Service Manual6.3.3.4 CommisioningFor a correct functioning of the HCI-GPU module within an instrument (gauge), the following entities can be set by using either Engauge or SmartView.☛By using the following table, check each entity for correctness.Name Value Range Default Value Explanation[FlexConn Modbus protocol switch] <FlexConn-GPU><Modbus><FlexConn-GPU> If production-, test-, configuration-, and/or service tools are to be used, switch to the FlexConn protocol by selecting <FlexConn-GPU>.[RS Baudrate] <1200><2400><4800><9600><19200><38400><57600><115200><19200> Communication speed[Turn around delay] <0..2000 ms> <0 ms> The turnaround delay is the minimum time the HCI-GPU waits, before starting answering the host.[Parity] <Odd><Even><None><Odd> User can have different parity depending upon application.<Stopbits> <One><Two><One>[Modbus slave address] <1..247> <1> On a site there can be multiple gauges connected via the RS-485 physical link and hence different CAN- RS boards can be identified by unique slave addresses.However, note that RS-485 supports only 32 devicesin multidrop and so must be the addresses.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-68.png)
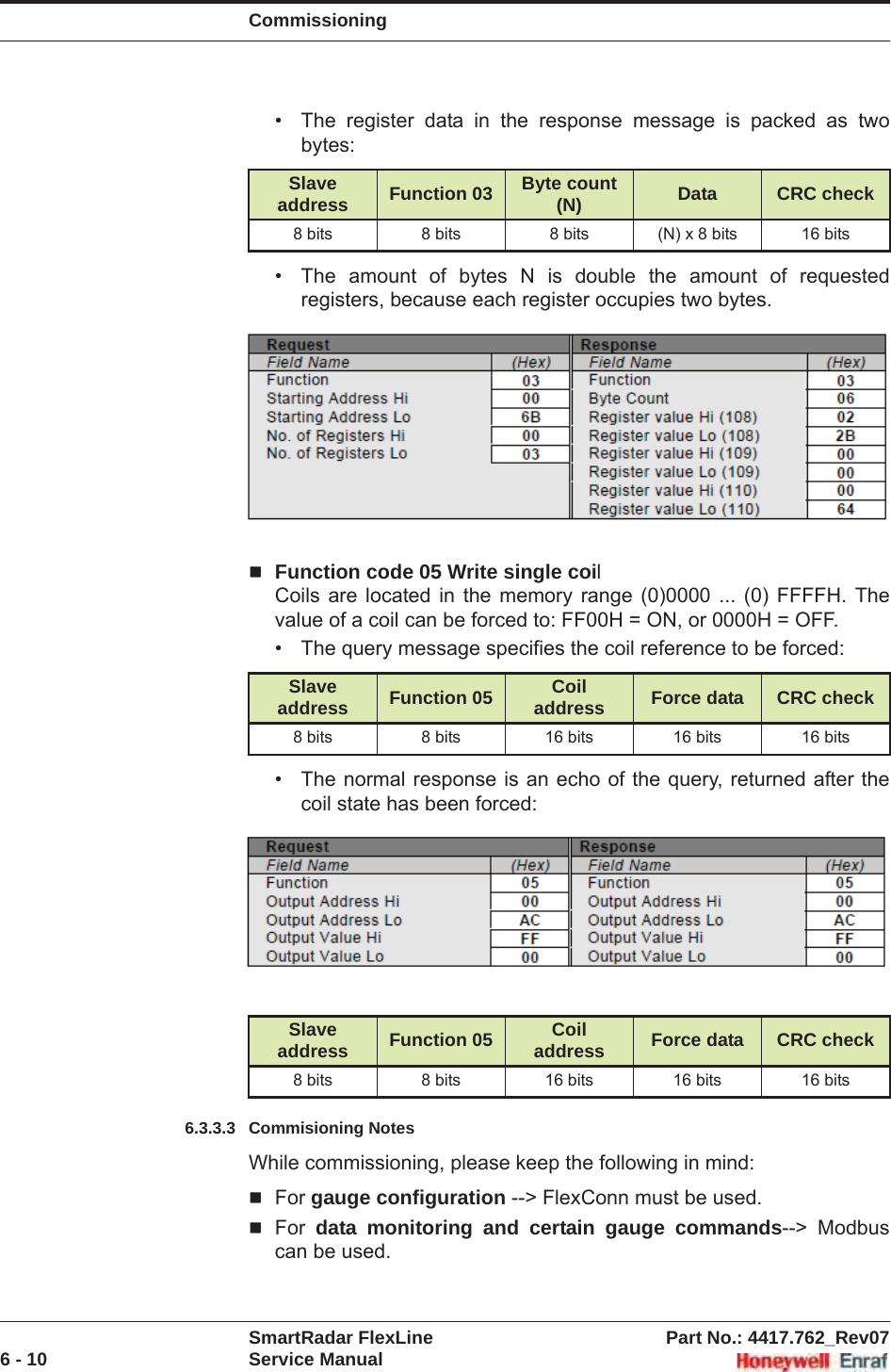
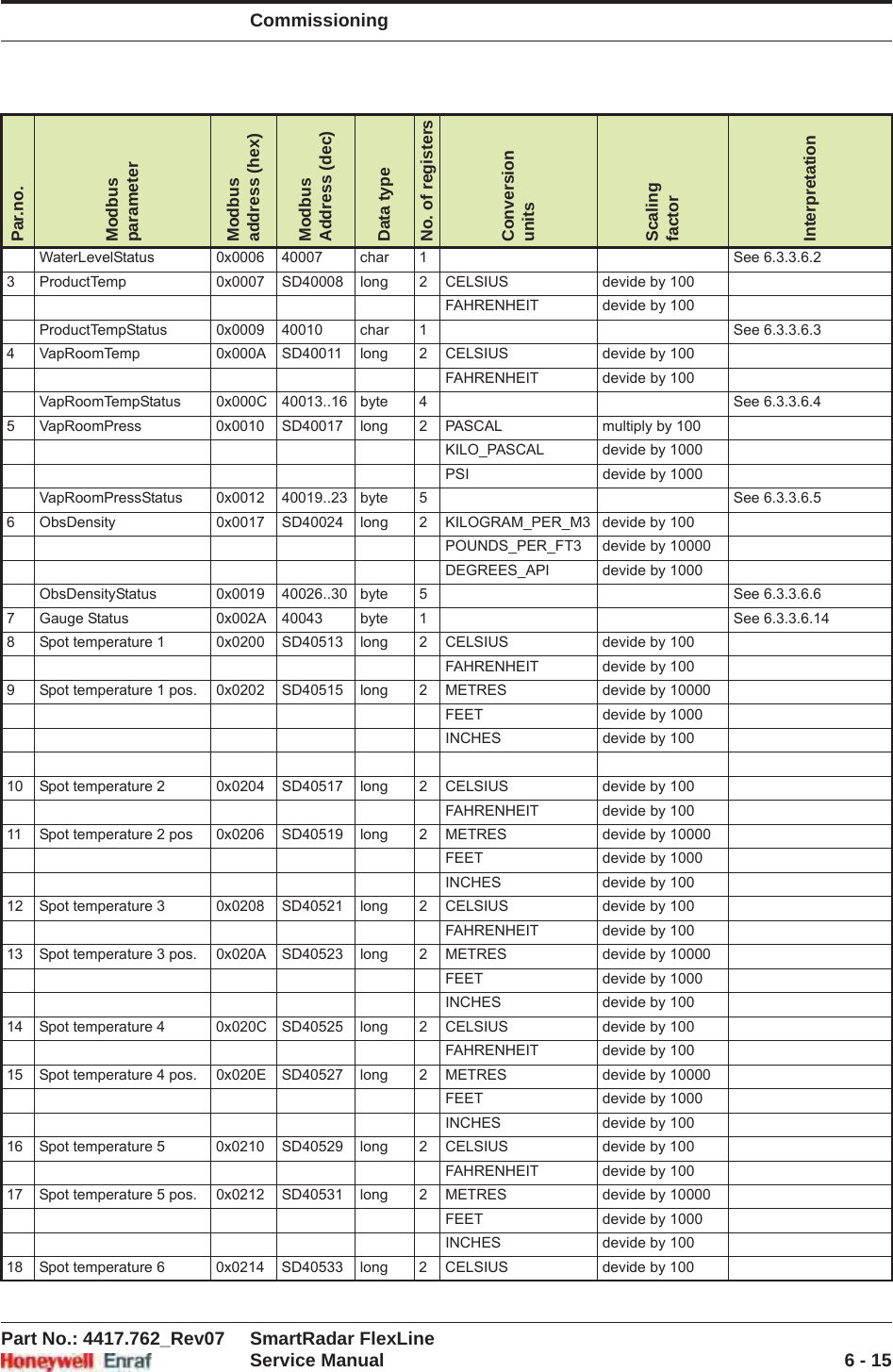
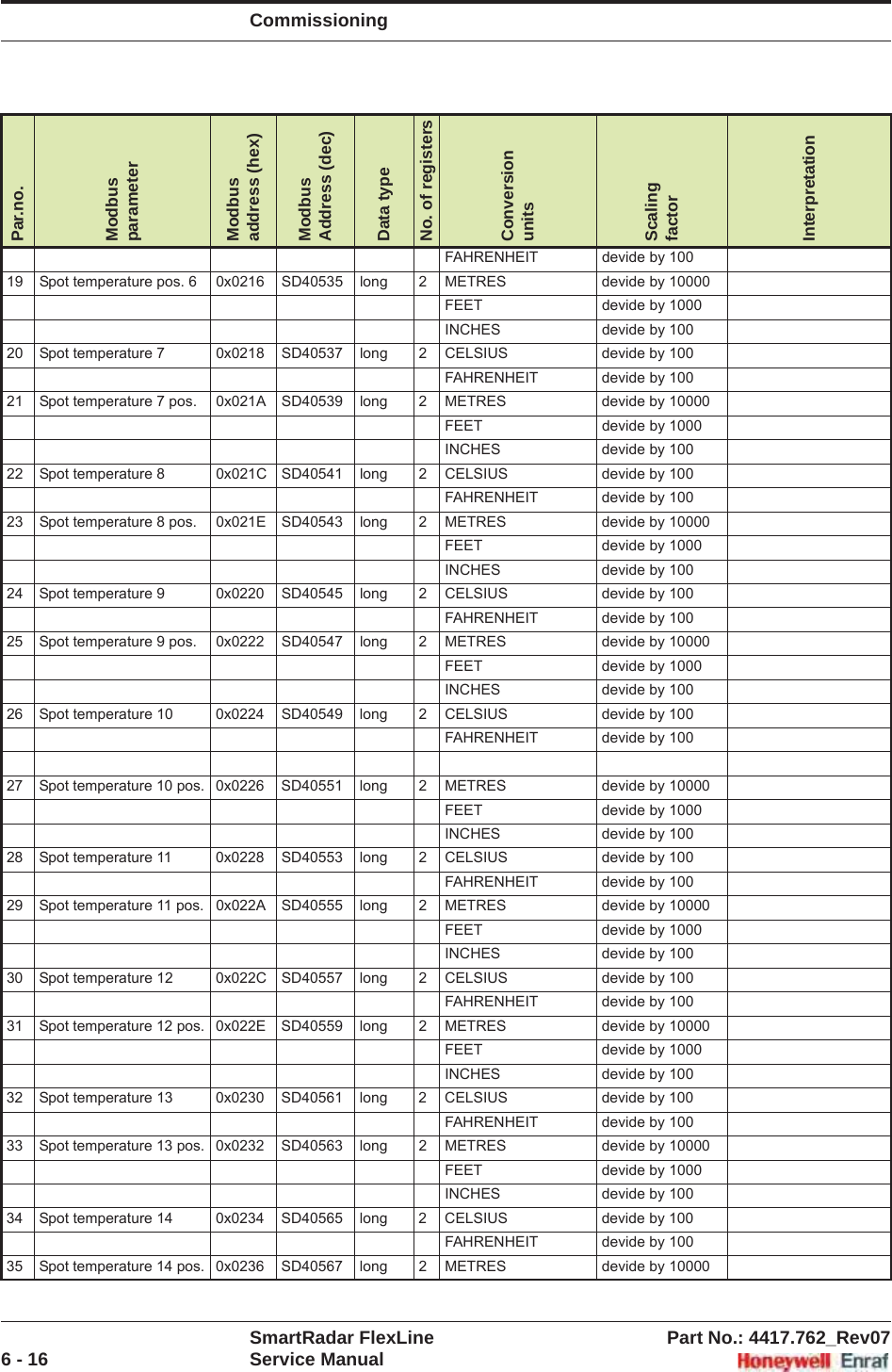
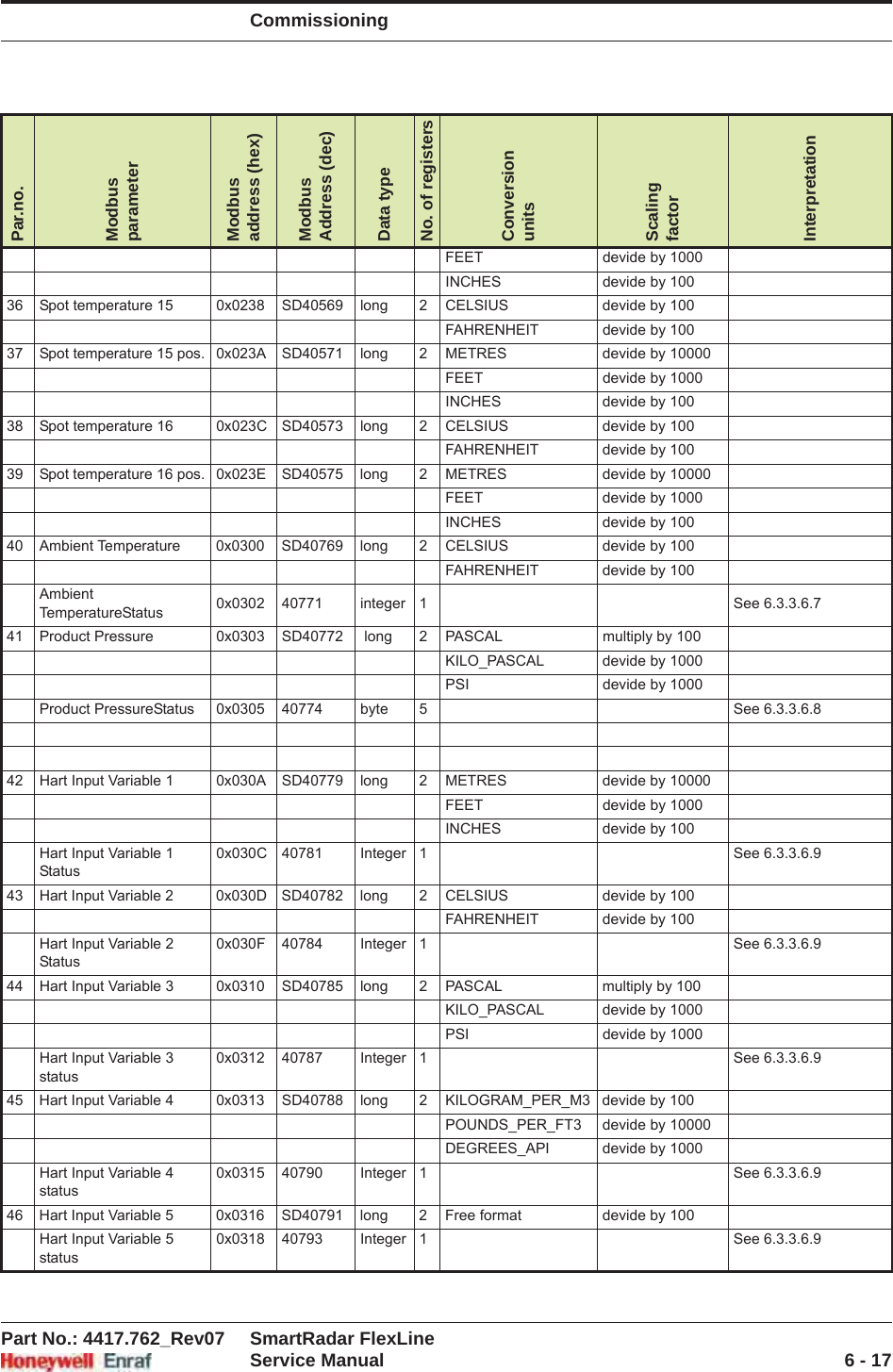
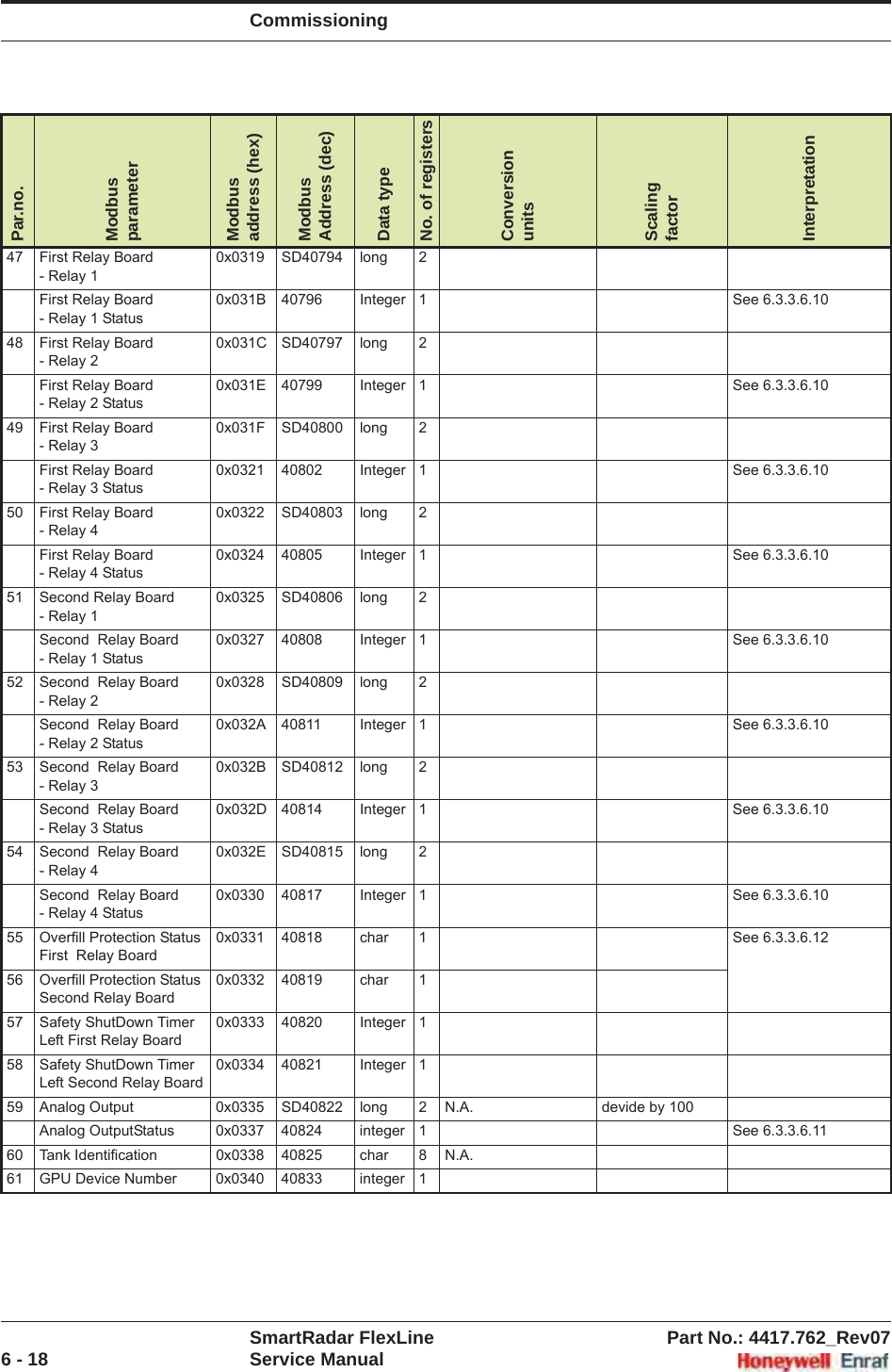
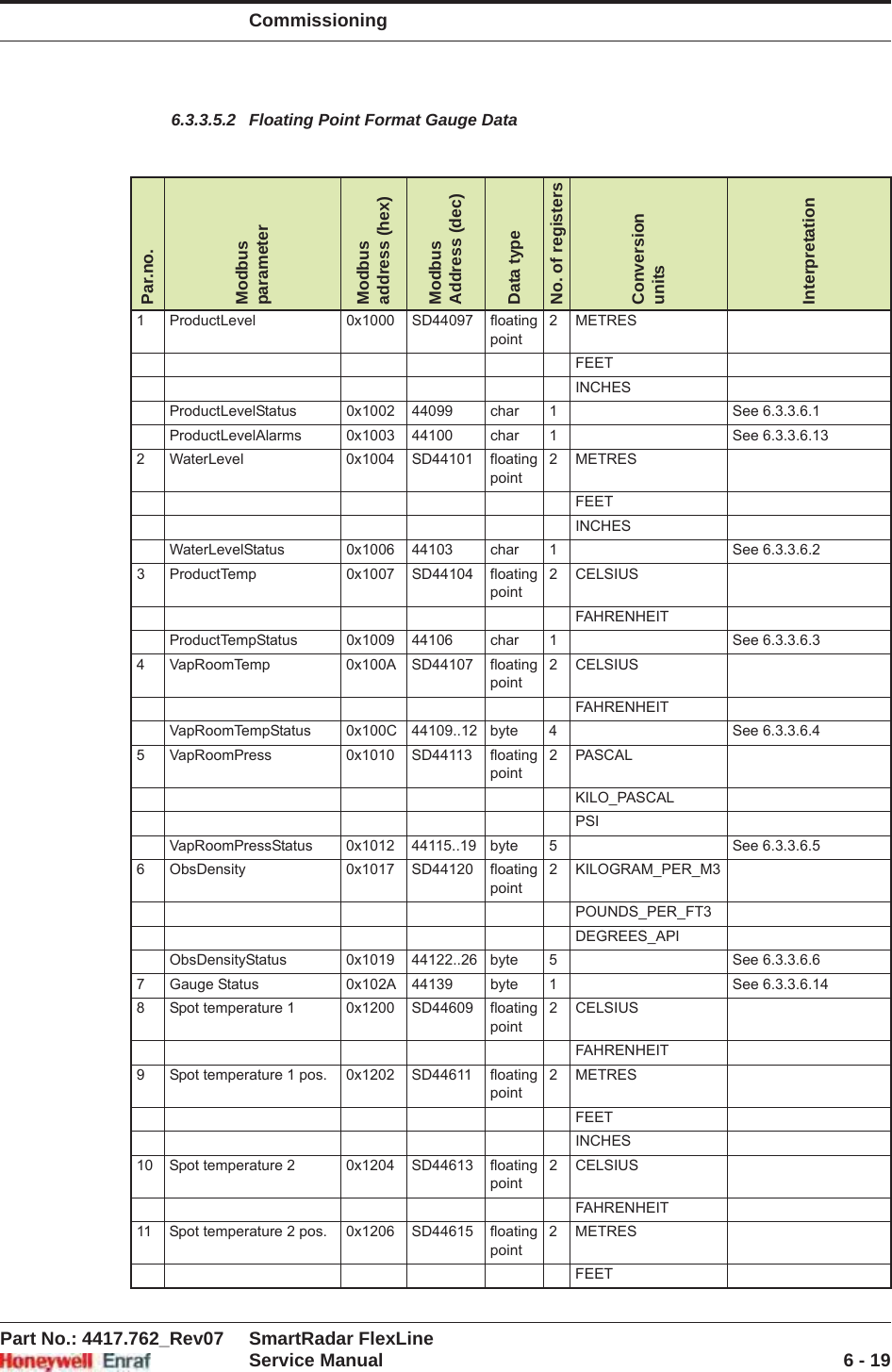
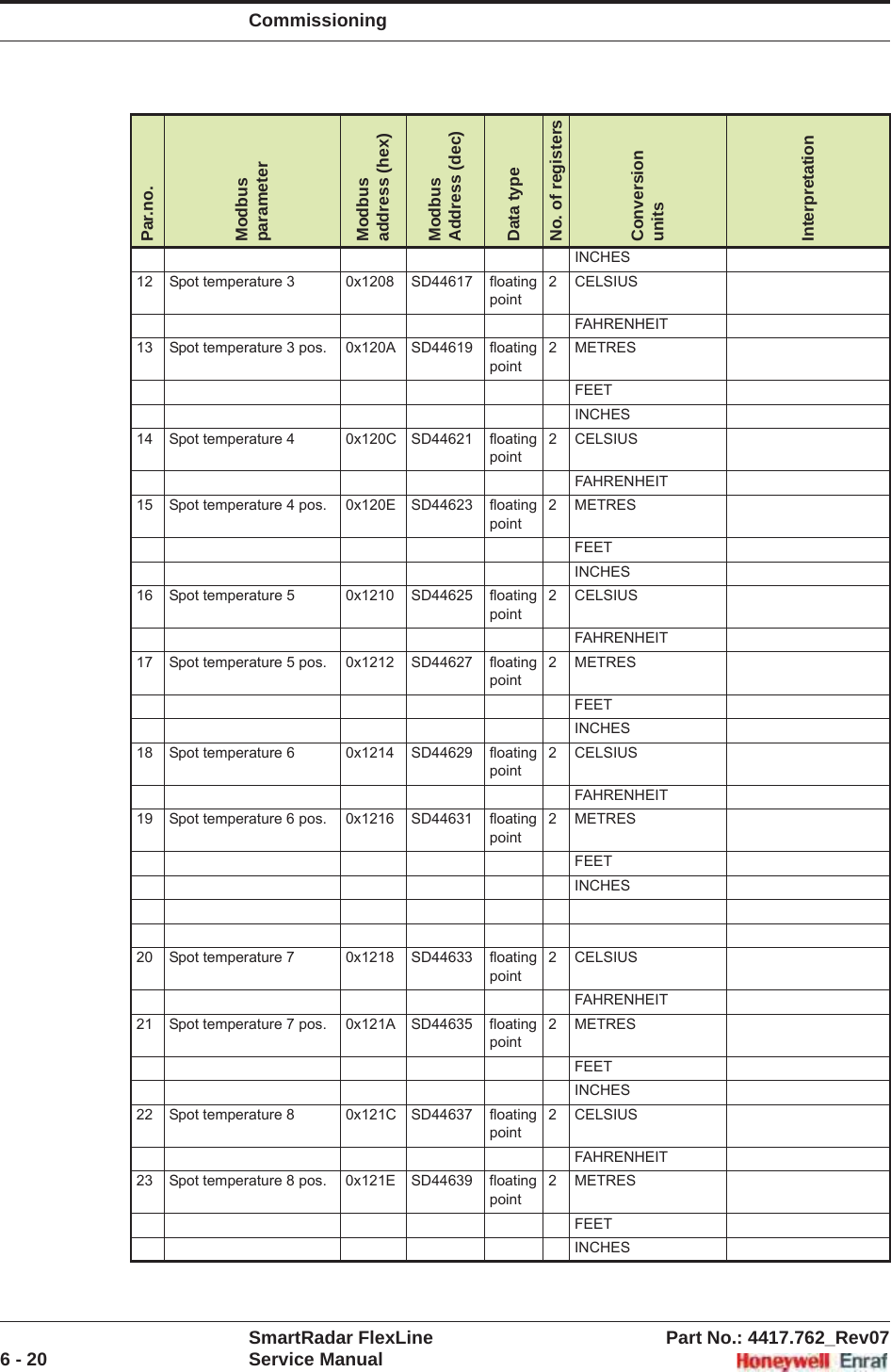
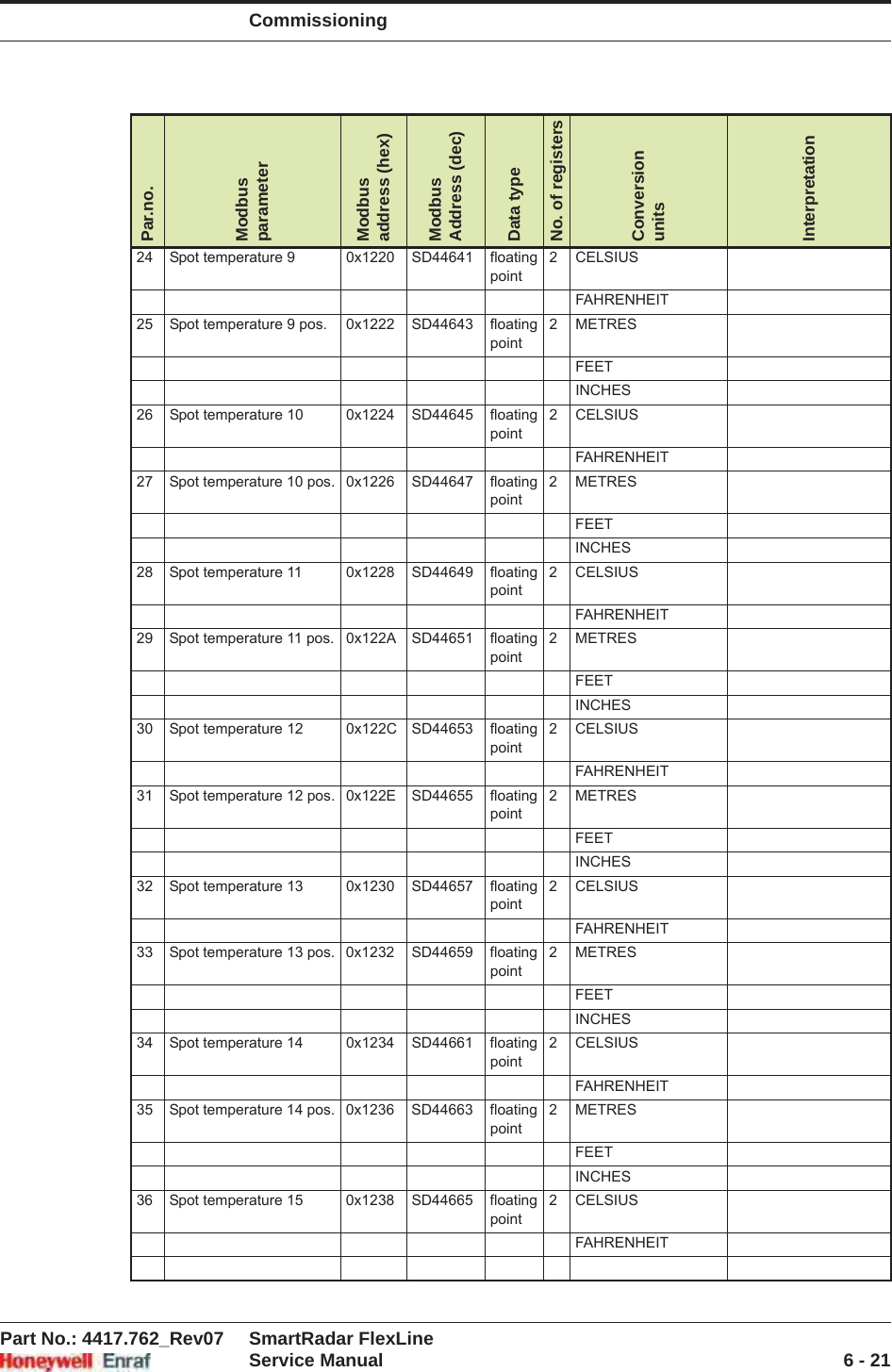
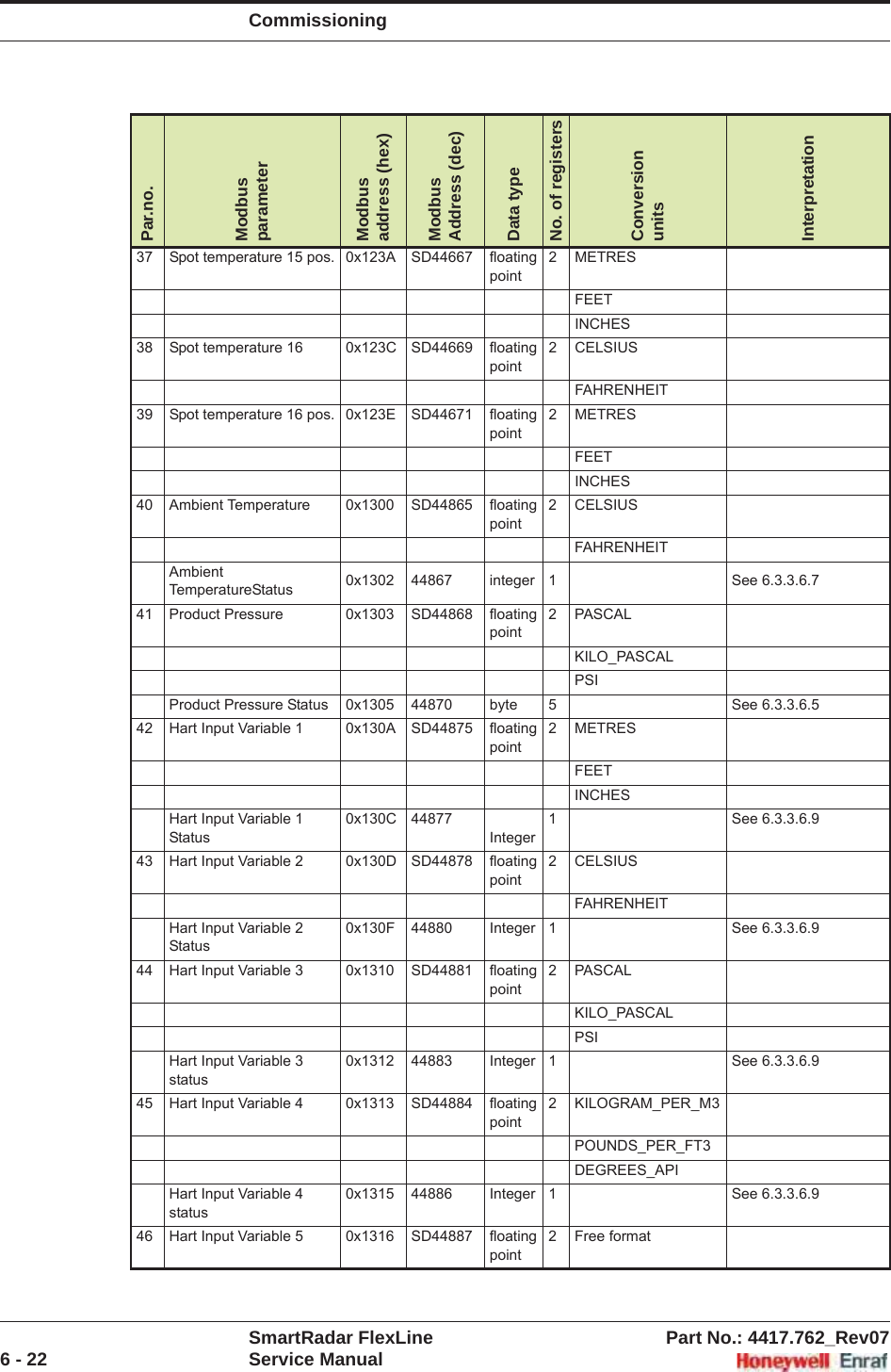
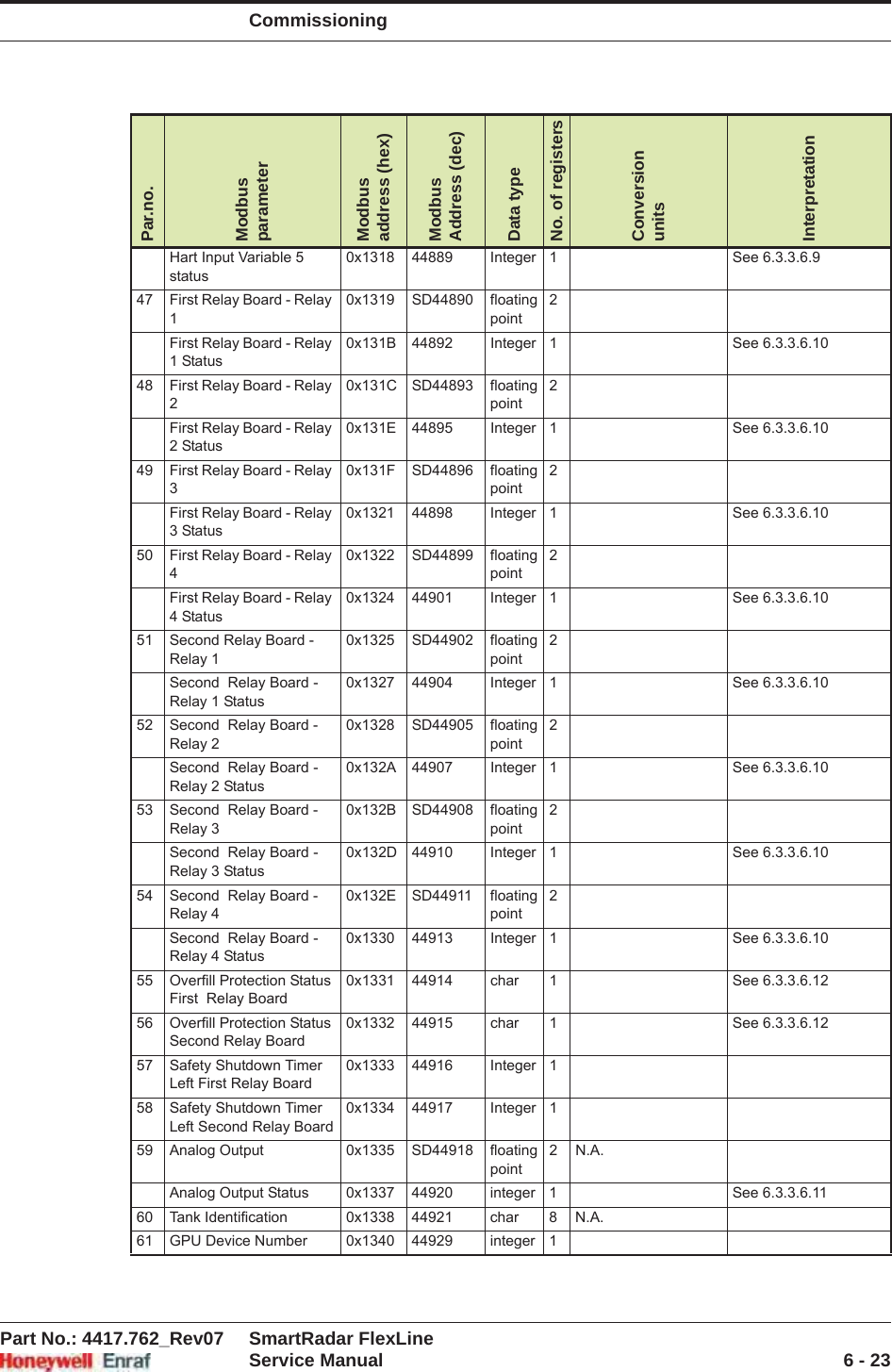
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 136.3.3.5 Modbus Holding RegistersInternal values in a Modbus device are stored in holding registers. These registers are two bytes wide and can be used for various purposes. Some registers contain configuration parameters where others are used to return measured values (temperatures etc.) to the host.The holding registers start counting at 40001. They are addressed in the Modbus message structure with addresses starting at 0.[Modbus register address offset] <0x0000..0xEE00> <0> As per Modbus, function code 03 supports 0000 to FFFF register addressing. Considering modbus map starting at 0x0000 and 0x1000 and keeping this constant, the offset address should be (0xFFFF - 0x1138 = 0xEEC7) . For Round off number 0xEE00. Offset can be moved any where between 0x0000 to 0xEE00. 0x1138 is total number of registers of both modbus map. [Level units] <meters><inches><feet><meters> The unit in which level-related records and items are shown[Temperature units] <celsius><fahrenheit><celsius> The unit in which temperature-related records and items are shown[Pressure units] <pascal><kilo pascal><psi><pascal> The unit in which pressure-related records and items are shown[Density units] <kilogram m3><degrees API><pounds ft3><kilogram m3> The unit in which density-related GPU records and items are shown[Communication type] <comm ni RS232><comm iso RS232><comm iso RS485><comm ni RS232> Communication typeNOTE: must be configured at the GPU slave tab of Engauge. See 6.3.3.[Function identification] <......> 13 characters <GPU-slave> The name of the current function of this module. This name is visible on the SmartView display.[Function priority]Name Value Range Default Value Explanation](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-69.png)
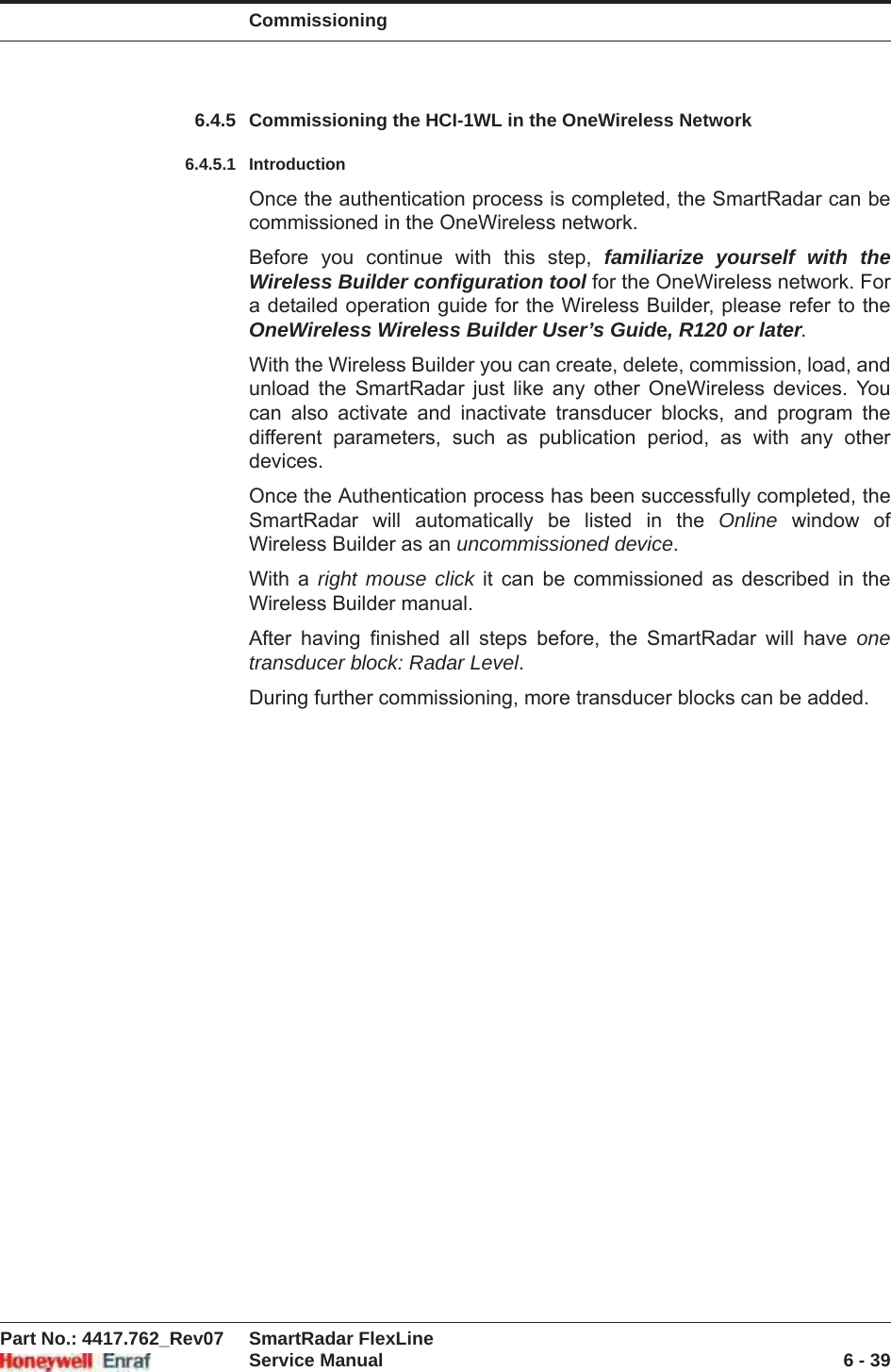
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 376.4.3.2 Preparing the RadarBefore adding a radar to a one wireless Network, old security information must be removed from the radar. To prevent this from happening by accident, this functionality is only available via the SmartView. To erase the security information:☛Go to [Menu] > [Commands]☛Enter the password☛Go to the HCI-1WL☛Select [Board] and issue the [Restore Default] command.6.4.3.3 Authentication☛Ensure the OneWireless Network is operational, including running Key Server Manager (KSM) software, and at least 1 multi-node configured as gateway. ☛Use the KSM to write security information to a memory card. See the Key Server Manager manual for instructions on how to use the key server. For a sample screen, see FIGURE 6-5.☛Insert the memory card into the memory card slot of the HCI-1WL device.☛Make sure to fully close the device if it is installed in an explosion hazardous area. ☛Switch on the deviceThe device will now automatically join the OneWireless network.You can follow the authentication/joining process by navigating to the correct page on the SmartView, see 6.4.8.1. Or by using Engauge, see 6.4.9.1, if there is also a wired connection available.If the message [NOREDUN] or [CONNECT] does NOT become visible, the authentication failed.☛If authentication failed, verify that the wireless network is operating correctly, and try again with a new security key.Key ServerManager](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-93.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 38 Service ManualFIGURE 6-5 Sample screen of the Key Server Manager6.4.4 Removing a Radar From the OneWireless NetworkTo remove a radar from a Onewireless Network, the security key information must be removed from the radar. To prevent this from happening by accident, this functionality is only available via the SmartView.To erase the security key information:☛Go to [Menu] > [Commands]☛Enter the password☛Go to the HCI-1WL☛Select [Board] and issue the [Restore Default] command.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-94.png)
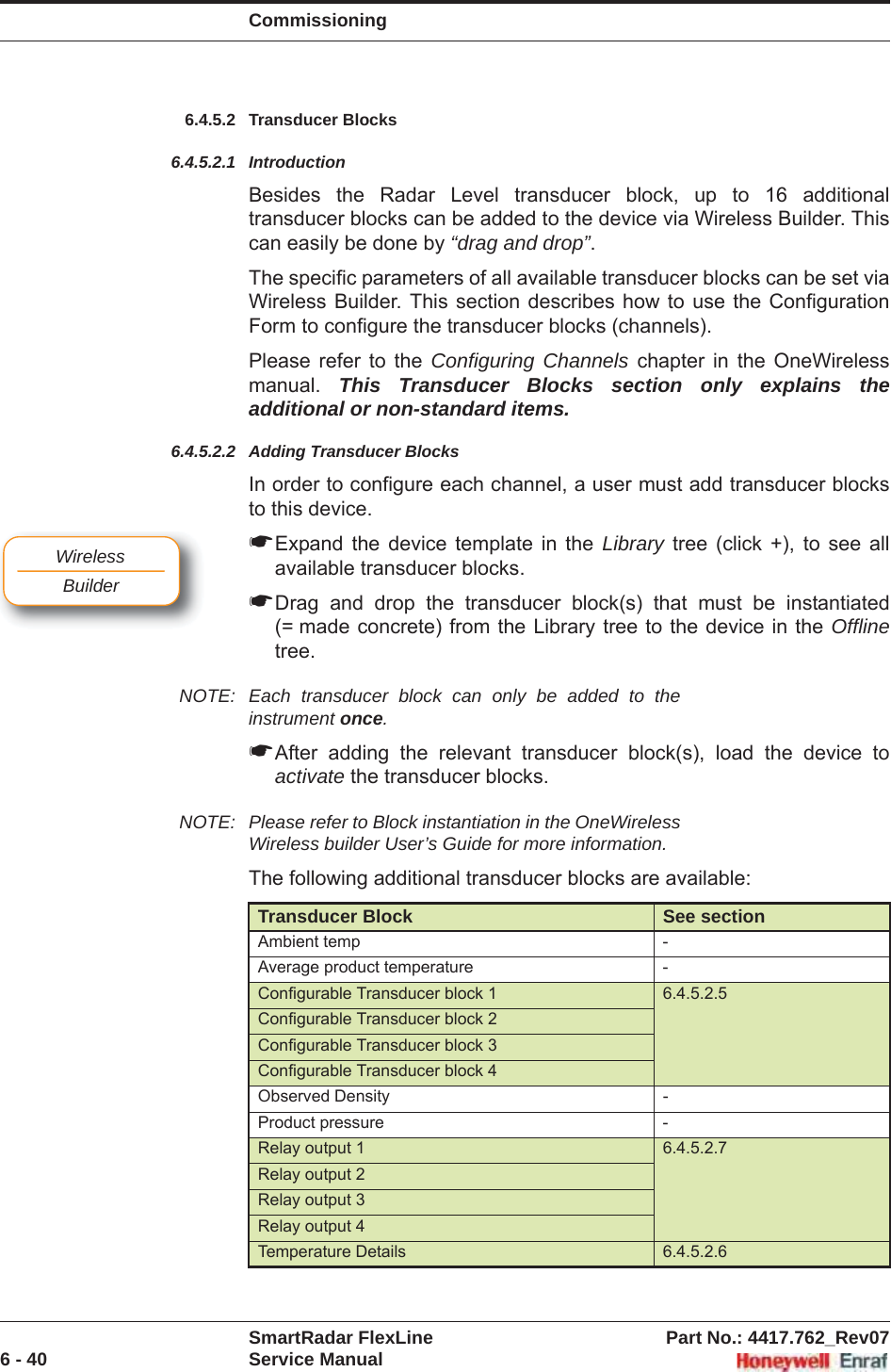

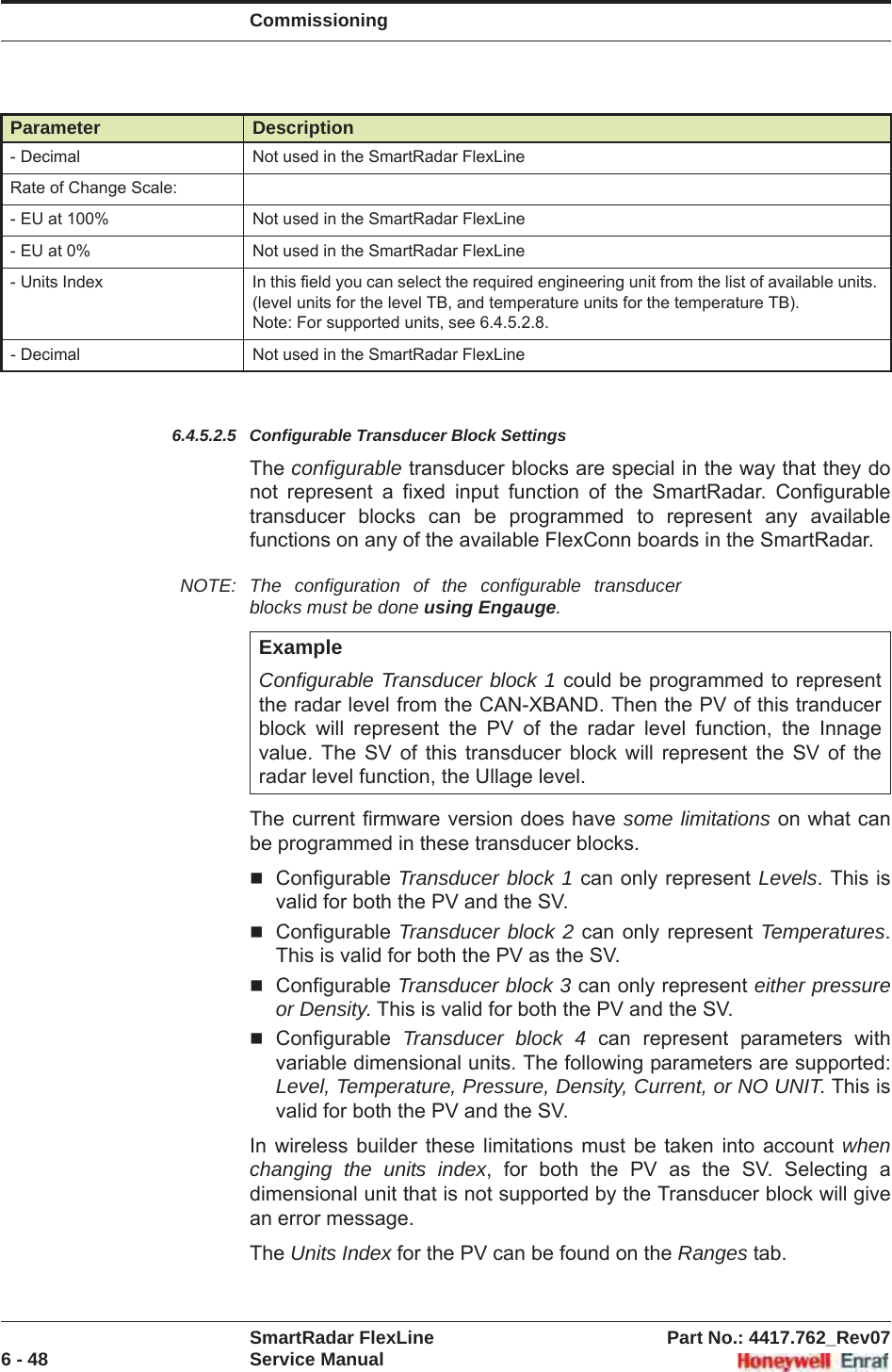
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 56 Service ManualName Explanation Value Range Default[Board ID] The board ID of the board that contains the function you want to map to the configurable transducer block. Look in the board list which boards are available.<0...255> <0>[Board Instance] The board instance of the board that contains the function you want to map. This is usually 0. Look in the board list to see if any boards are available more than once in the instrument.<0...7> <0>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-112.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 57All 4 configurable transducer blocks have the same settings in Engauge. However the various configurable transducer blocks are reserved for particular types of data:Configurable Transducer block 1 is reserved for level dataConfigurable Transducer block 2 is reserved for temperature dataConfigurable Transducer block 3 is reserved for density and pressuredataConfigurable Transducer block 4 can be used for any of the data types mentioned above. The Secondary Variable (SV) of the configurable function block is automatically assigned to the Secondary Value of the FlexConn board function that is linked to the Primary Variable PV as described before. 6.4.7 Commissioning the HCI-1WL for GPU and FlexConn CommunicationBy using a protocol tunnel through the OneWireless network, it is possible to connect the standard Honeywell Enraf Entis systems, or service tools.The physical connection between the Entis systems or service tools is either via an Ethernet connection to the Gateway, or via an RS-232 line through a Lantronix RS-to-Ethernet convertor to the Gateway. See chapter 4.2.1 for details.[Function Instance] This identifies the function which data you want to map to this transducer block.<0...15> <0>[Unit Type] The unit type is necessary to identify in One Wireless.<0...5> <0>units of data:0 = no unit1 = level2 = temperature3 = pressure4 = density 5 = currentExampleTo link a configurable transducer block to the Radar Level of the TII-XR, the following settings need to be configured:[Board ID] = 5[Board instance] = 0[Function instance] = 1[Unit type] = 1Name Explanation Value Range Default](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-113.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 58 Service ManualFor a correct functioning of the HCI-GPU module in an instrument (gauge), the following entities can be set by using either Engauge or SmartView.☛By using the following table, check each entity for correctness.Name Value Range Default Value Explanation[Identification] 8 characters e.g.<TANK1234><--------> Name of a tank or instrument[GPU instrument address] <0..99> <0> The address of this instrument for GPU messages.Note: Each instrument must have a unique GPU address.[GPU Caching] <caching off><GPU B record><GPU C record><GPU D record><GPU L record><GPU M record><caching off> By switching on caching, the system performance can be greatly improved. Switching caching on for a record means that the OneWireless network will automatically keep an up-to-date copy of this record in the internal cache of the gateway. This copy will be refreshed each second. Any request for this record will NOT be sent to the instrument but directly be answered from the cache.Note: Do not use this setting for W&M approved systems.[FlexConn instrument address] <0..1899> <0> The address of this instrument for FlexConn messages.Note: Each instrument must have a unique FlexConn address.[Level units] <meters><inches><feet><fractions><meters> The unit in which level-related GPU records and items are shown[Temperature units] <celsius><fahrenheit><celsius> The unit in which temperature-related GPU records and items are shown](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-114.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 59☛After having checked/set all before listed entities, make surethe [Board Commissioned] and the [OneWireless GPU slave Commissioned]entities are <True>;the [Board Health] and the [OneWireless GPU slave Health] entities are <GOOD>.[Pressure units] <pascal><kilo pascal><psi small> (2 digits before separator)<psi large> (3 digits before separator)<pascal> The unit in which pressure-related GPU records and items are shown[Density units] <kilogram m3><degrees API><pounds ft3><kilogram m3> The unit in which density-related GPU records and items are shown[Decimal separator] <point><comma><point> The decimal separator in which GPU-related records and items are shown[Level type] <innage><ullage><innage> The level-related GPU records and items can be shown as an innage or ullage.Note:•Innage is the level of the product measured from the bottom.•Ullage is the level of free space from the roof till the product.[Password] <......> 6 characters <ENRAF2> Password for entering the protected level.Note: Some settings reside under the protected level.[Function identification] <......> 13 characters <GPU-slave> The name of the current function of this module. This name is visible on the SmartView display.Name Value Range Default Value Explanation](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-115.png)
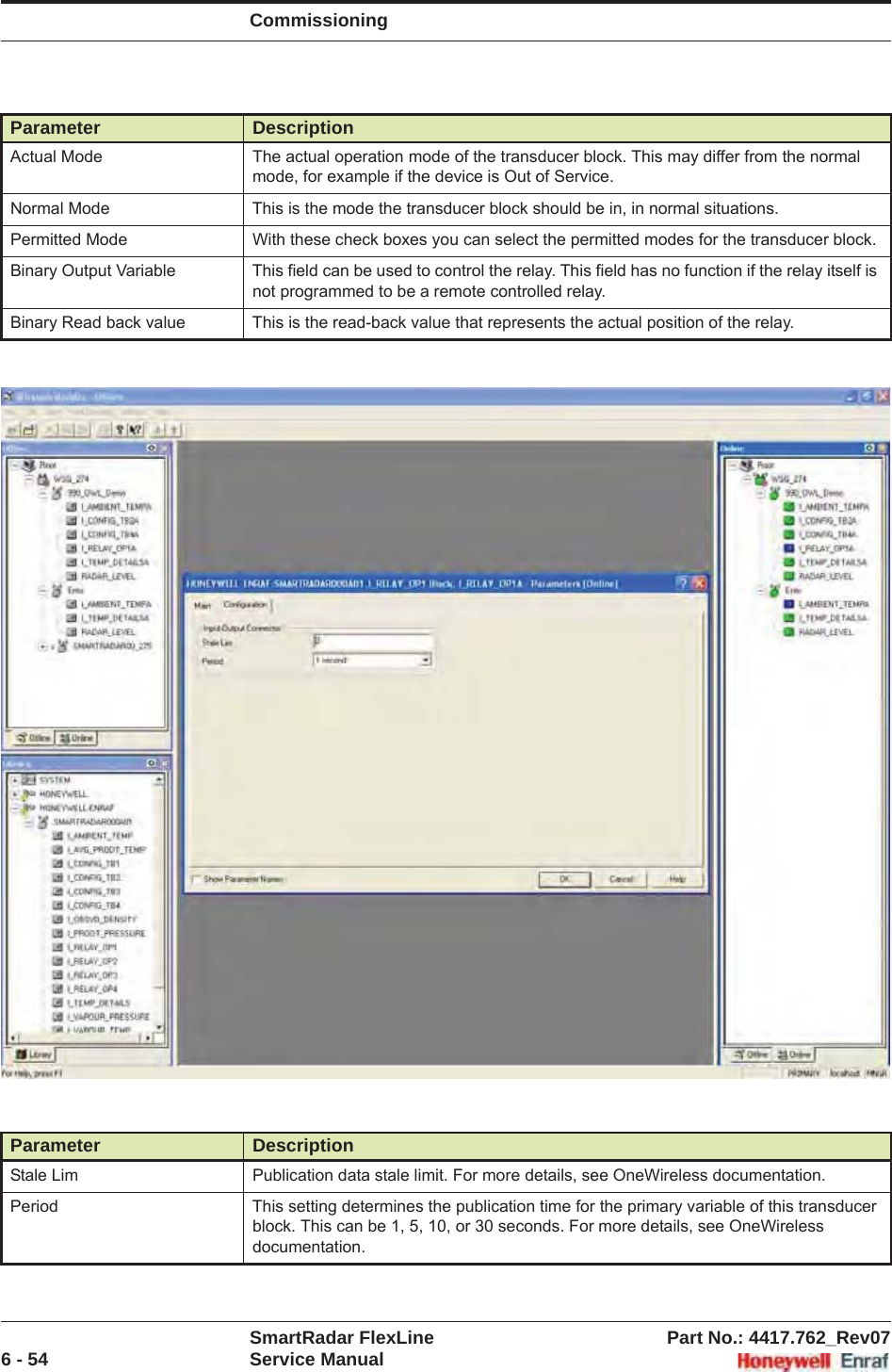
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 60 Service Manual6.4.8 Using the SmartView with the OneWireless Communication Option6.4.8.1 IntroductionThe SmartView replaces the display that is usually available on OneWireless transmitters.6.4.8.2 SmartView OneWireless Status DisplayAt the Smartview, there is a special OneWireless status display available, called the [extra information] display. See screen below.This screen is required during commissioning for the authentication process and to check the wireless connection quality. It can also be used in case of wireless connection problems. ☛At the Smartview, enter the menu by pressing + simultaneously. ☛Scroll to the menu item [extra information], and press + simultaneously, to enter the OneWireless screen. NOTE: Since this [extra information] screen is also used for other purposes, it may be possible that you have to configure the 990 SmartRadar to show this screen when the [extra information] menu item is selected. This can be done on the SmartView itself or by using Engauge, see 6.7.2.Parameter DescriptionPRSSI Primary RSSI = Signal strength indicator for primary wireless connectionSRSSI Secondary RSSI = Signal strength indicator for the redundant wireless connectionConnection status Radio connection statusSD Status SD-memory card status><<<MAIN](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-116.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 61Signal strength (RSSI = Radio Signal Strength Indicator)The signal strength is shown in dBm. Below -80 to -85 dBm no reliable connection is possible.When there is no redundant wireless connection the secondary RSSI does not show a relevant value.Connection statusIn the display of the Smartview the following Connection status messages can / will be visible:SD StatusIn the display of the SmartView one out of the following SD card statuses will be visible:6.4.9 Radio Board Diagnostic Information and Commands6.4.9.1 IntroductionDiagnostic information, such as the data in the [extra information] screen, and more, can also be read using Engauge (professional version), or with the [Commissioning] screen of the SmartView.Additionally, there are 3 commands that can be given to the radio board on the HCI-1WL module.Display Text DescriptionNO KEY: No security key information availableInsert a memory card with security information.MACCONN Intermediate message during connection processSECCONNCONNECT The device is connected to the OneWireless network via 2 multinodes / gateways.DISCOVR Intermediate message during connection processNOTCONN The radio is not connected.Make sure the OneWireless network is operational.Could also happen if the radar is moved to another network.SECURNG Intermediate message during connection processNOREDUN The device is connected to the OneWireless network via 1 multinode / gateway only.BAD KEY No valid key available.Could happen if the radar is moved to another network (e.g. from factory to customer/ from workshop to real-life network etcetera).Display Text DescriptionSDOK SD card with security key presentNOSD No security key / No SD card / Bad SD card](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-117.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 62 Service Manual6.4.9.2 Commands☛Select [Read device information], to read the static information from the radio board.After executing this command, the static information from the radio board is read from the radio board and made available in diagnostic entities. See 6.4.9.3.☛Select [Read dynamic info], to read the dynamic information from the radio board.After executing this command, the dynamic information from the radio board is read from the radio board and made available in diagnostic entities. See 6.4.9.3.☛Select [Restore Defaults], to remove the security key information from the radar.In this way, the radar is disconnect from the wireless network.NOTE: This command CANNOT be given via Engauge.CAUTION! With this command all settings on the radio board will be erased!6.4.9.3 Diagnostic InformationSD Card StatusConnection StatusDisplay Text DescriptionSDOK SD card with security key presentNOSD No security key / No SD card / Bad SD cardDisplay Text DescriptionNO KEY: No security key information availableInsert a memory card with security information.MACCONN Intermediate message during connection processSECCONNCONNECT The device is connected to the OneWireless network via 2 multinodes / gateways.DISCOVR Intermediate message during connection processNOTCONN The radio is not connected.Make sure the OneWireless network is operational.Could also happen if the radar is moved to another network.SECURNG Intermediate message during connection processNOREDUN The device is connected to the OneWireless network via 1 multinode / gateway only.BAD KEY No valid key available.Could happen if the radar is moved to another network (e.g. from factory to customer/ from workshop to real-life network etcetera).](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-118.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 67For correct measuring results, a number of parameters such as [Tank bottom position],[Upper reference position], and [Offset to roof] must be defined before.In addition, alarm settings and compensation (filtering) constants are to be set.This can be done by using either Engauge or SmartView.6.5.2.2 Level Start-UpFor entity definitions, see FIGURE 6-7 and FIGURE 6-8.ESF07-0008FIGURE 6-7 Basic commissioning entitiesRadar referenceMaximum Safe Fill heightlevel ullage(innage)NozzlelengthFree Space applications Stilling Well applicationsOffsetto roofTank bottom positionUpper reference positionStilling welldiameter](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-123.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 68 Service ManualESF07-0011FIGURE 6-8 Definition of [Offset to roof]☛To get the radar gauge level without any compensations enabled (but with averaging filter and maximum Safe fill warnings enabled), program the entities listed in the tables below.☛For a Free space application, program following entities:Entity Name Explanation[Tank bottom position] The gauge uses this information to calculate the level (innage), and to determine the position of the bottom reflection (part of peak selection).[Maximum Safe fill] With this entity the gauge checks if the programmed upper measuring range is valid ([Minimum measurable distance] at least<0.5 m> from the antenna).[Upper reference position] This entity is only used if “ullage” is to be read from the SmartRadar FlexLine. The ullage is then calculated from the measured level (innage) as [Upper reference position]-measured level.[Offset to roof] The distance between radar reference and the tank roof. The gauge uses this information to determine the position of the echoes caused by the product and the roof. A positive value means the roof is below radar reference (see also FIGURE 6-8).radar referenceOffset to roof negativeOffset to roof positive](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-124.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 69☛For a Stilling well application, program following entities:6.5.2.3 Level CheckWith the [Accept reference] command, the gauge’s innage or ullage value is initialized in accordance with the before programmed reference data. From here the gauge will follow all relative level changes.This command will only be accepted if the product level is <GOOD>.This command also puts the SmartRadar FlexLine in accurate level measurement mode, so this command MUST be given!The [Accept reference] command can handle either a reference innage or a reference ullage level. To adjust to an innage level fill in entity [Reference innage], to adjust to an ullage level fill in entity [Reference ullage]. This level value is mostly obtained by a manual level measurement (hand dip); see FIGURE 6-9.When all values are sent to the SmartRadar FlexLine, the [Accept reference] command can be given.When an innage or ullage reference value is not available, the [Accept reference] command must be given without filling any of these entities. The SmartRadar FlexLine will now be put into accurate level measurement mode.[Nozzle length] Needs only to be set if the antenna is installed inside the nozzle.Entity Name Explanation[Tank bottom position] The gauge uses this information to calculate the level (innage), and to determine the position of the bottom reflection (part of peak selection).[Maximum Safe fill] With this entity the gauge checks if the programmed upper measuring range is valid ([Minimum measurable distance] at least <0.5 m> from the antenna).[Upper reference position] This entity is only used if “ullage” is to be read from the SmartRadar FlexLine. The ullage is then calculated from the measured level (innage) as [Upper reference position]-measured level.[Stilling well diameter] The inner diameter of the stilling wellEntity Name Explanation](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-125.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 70 Service ManualESF07-0009FIGURE 6-9 Level check entitiesNOTE: This command does not adjust the [Tank bottom position], so this entity should be set manually to approximately the correct value (within ± 0.1 m).☛Give the [Accept reference] command.☛Make sure the [Accept reference status] is <GOOD>.Some remarks for the Engauge users:To make sure the [Accept reference] command works fine, all entities must have been sent to the gauge (no yellow backgrounds may be visible) prior to giving the command.☛To read the [Accept reference status], push the [Read] button (is not auto-matically displayed).Some remarks for the SmartView users:On the SmartView display, the advanced entity [Reference radar] is visible as well. The value of this entity must be left to the default value <+999.9999>.☛Check [Reference status] in the commissioning menu, to see if the command has been accepted.Reference innageRadar referenceTank bottom positionReference ullageUpper reference positionTank zero (dipping plate)](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-126.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 716.5.2.4 Alarm Settings☛Set the entities [High high alarm],[High alarm],[Low alarm],[Low low alarm],and [Alarm hysteresis] to the desired values.For definitions, see FIGURE 6-10ESF07-0012FIGURE 6-10 Alarm and hysteresis definitionsAll above mentioned entities MUST be set as the defaults are extremes (1E+12). If they are not, no errors will be displayed, but the [Commissioned] entity will be <False>.If the alarm entities are correctly set, but the [Alarm hysteresis] is not, then any alarms that would raise will never be set off! So watch the [Commissioned] status.Be aware that the alarm status is only visible in the [Primary value]entity (innage)! It is not visible in the [Secondary value] entity (ullage).Although the GPU-protocol always contains the alarm status, the current software only passes the actual alarm status to this protocol if the gauge is set to innage control. So when ullage status is asked for by the GPU-protocol, NO alarm statuses are displayed.Workaround solution: Set the GPU records to innage.Tank zeroAlarm HysteresisAlarm HysteresisMaximum safe fillHigh High alarmHigh AlarmLow AlarmLow Low alarm](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-127.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 72 Service Manual6.5.2.5 Alarm Loop CheckingNormally, level alarms can be verified when the level reaches the low- level or high-level alarm set point. The level alarms and, if applicable, the hard alarm contact coupled to one of the level alarms can be checked by a “loop check” command. This check is independent from the actual level value.The level alarm signalling can be checked in several ways:via the communication line to the hostvia the hard alarm output contact☛To perform the alarm test, set [Alarm test enable] to <Enable> and set [Alarm test] to the required alarm (<High High alarm>,<High Alarm>,<LowAlarm>, or <Low Low alarm>). [Alarm test] is a parameter command, and the command will be executed when the parameter is sent to the gauge. When the command is given, the corresponding alarm will be set for 1 minute.6.5.2.6 Compensations6.5.2.6.1 FilteringThe gauge contains an output filter for both radar innage and radar ullage. The higher the [Filter averaging constant], the more damping on the radar innage and radar ullage values. The filter also introduces a lag between actual ullage/innage and filtered ullage/innage when the product level is changing. The higher the [Filter averaging constant], the larger the lag. The minimum [Filter averaging constant] value is 0 (no filtering), the maximum [Filter averaging constant] value is 99. For the general filter behavior, see FIGURE 6-11.FIGURE 6-11 Filtering characteristic example (level change = 5 mm/s)5.35.255.25.155.15.055.04.950 20406080100120Filtering averaging constant = 98UllageAverageUllage [m]Time [s]Exponentially weighted moving average filtermaximum lag [m]maximum lag [s]](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-128.png)
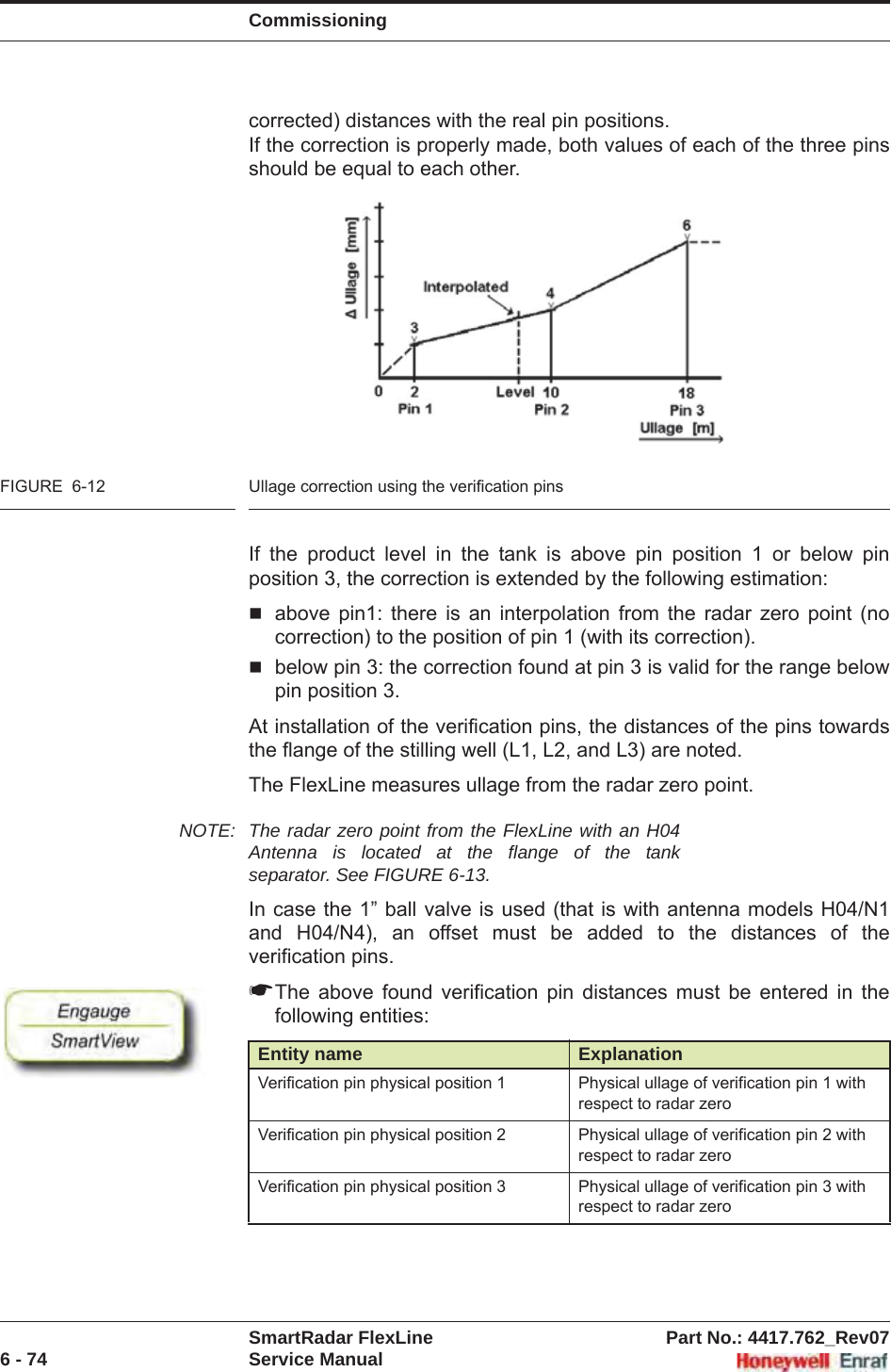
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 73In the table below some filtering figures are given.6.5.2.6.2 Verification PinsWhen a radar level gauge is installed on a pressurized tank, both ISO and API suggest to use so-called verification pins to verify the radar level measurement. Prime reason to use said verification pins is the impossibility of doing a manual reference dip. With verification pins it is possible to verify the correct reading of the radar measurement at specific heights while the tank is in operation. The SmartRadar FlexLine can be switched to measure the pin positions. The reading can then be compared with the known position of the pins. It is advised to have three verification pins:Pin 1 at approximately 80 - 90 % of tank heightPin 2 at approximately 50 % of tank heightPin 3 at approximately 10 - 20 % of tank heightPin 1 should be above maximum safe fill (so, it can always be measured), however there must be at least 0.6 m (2') free space from pin 1 to cone end. All pin positions should be measured with 1 mm (1/32”) uncertainty with reference to the ball valve.The SmartRadar FlexLine can measure the position of the three pins when the housing is rotated 90°. The verification pins are then ‘visible’ to the SmartRadar FlexLine. This can be done without closing the 1" (or 4") ball valve, as the FlexLine housing is located above the tank separator. After the command “Measure verification pins” is given, the measured positions of the three pins can be requested. The “real” position of the pins (from tank drawing) and the “measured” position of the pins are compared and a correction is applied.After the SmartRadar FlexLine is placed in the normal (product measuring) mode, the measurement is automatically corrected for the found verification pin positions.FIGURE 6-12 illustrates the correction method for verification pins.Once the position of the verification pins is determined, the FlexLine can be switched into verification mode to verify the measured (and [Filter averaging constant]Approximate noise reduction factorMaximum lag[s] Maximum lag[distance]50 1.4 0.1 0.1 * dL/s70 1.8 0.25 0.25 * dL/s90 3 1 1 * dL/s95 4.5 2 2 * dL/s98 7 5.5 5.5 * dL/s99 10 11 11 * dL/s](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-129.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 76 Service Manualreflections from the verification pins are stronger and recognized by the SmartRadar FlexLine.FIGURE 6-15 Verification pin measuring positionTo measure the position of the verification pins, the SmartRadar FlexLine must be turned 90 degrees as follows:Release the coupling nut of the SmartRadar FlexLine housing.Lift the SmartRadar FlexLine housing from tank separator.Rotate the SmartRadar FlexLine for 90°. This can only be done in one direction because of the locking pin.Place SmartRadar FlexLine on tank separator; mind locking pin.Secure the coupling nut of the SmartRadar FlexLine housing.Then issue the command: [Measure verification pins] (on SmartView:Calibrate v-pins).When the verification pin measurement is completed, the SmartRadar FlexLine housing must be turned back 90° (follow above procedure in reverse order). The verification-pin compensation must be enabled by the appropriate switch. In Engauge, that is (depending on installed TII-XR firmware and board descriptor):• the second position of correction field:(up to TII-XR firmware version A1130 and board descriptor V4)](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-132.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 77• or, Field02:(with TII-XR firmware version A1131 and board descriptor V5)• or, Verification pins:(from TII-XR firmware version A1140 and board descriptor V6)For the SmartView the command is implemented from TII-XR firmware version A1142, and resides under the Command menu as follows:☛From the menu select:[Commands]board [TII-XR] and[Product level].☛Then scroll through the list of commands, and select the command [Enable v-pins].To disable the verification pin compensation, proceed as follows:By Engauge:☛Set the appropriate field in the Compensation TAB to <False>.By SmartView:☛From the menu select:[Commands]board [TII-XR] and](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-133.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 78 Service Manual[Product level].☛Then scroll through the list of commands, and select the command [Disable v-pins].Below an example of two reflection diagrams from product measuring mode and verification-pin measuring mode, and an example of the compensation sheet.FIGURE 6-16 Product measuring mode, reflection diagram exampleFIGURE 6-17 Verification pin measuring mode, reflection diagram example](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-134.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 79FIGURE 6-18 Verification pin compensation, example6.5.2.7 Errors and WarningsThe status code of the [Primary value] or the [Secondary value] can display an error (status = <BAD>) or a warning (status = <UNCERTAIN>).Most common error messages are:6.5.2.8 Additional InformationFollowing information can be extracted from the TII-XR system:Message CauseRadar max safe fill not set error [Maximum safe fill] still set to 0 (zero)Radar max safe fill out of range [Maximum safe fill] value too highEntity Description[DSP firmware version] Besides a generic processor, the TII-XR has a Digital Signal Processor for algorithm calculations. See also FIGURE 6-6.[Production date] Production date of the complete SmartRadar FlexConn system.[ART2A serial number] The serial number of the high-frequency module. This module does all measurements.[Device serial number] Serial number of the complete SmartRadar FlexConn system.[Antenna serial number] Serial number of the measuring antenna.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-135.png)
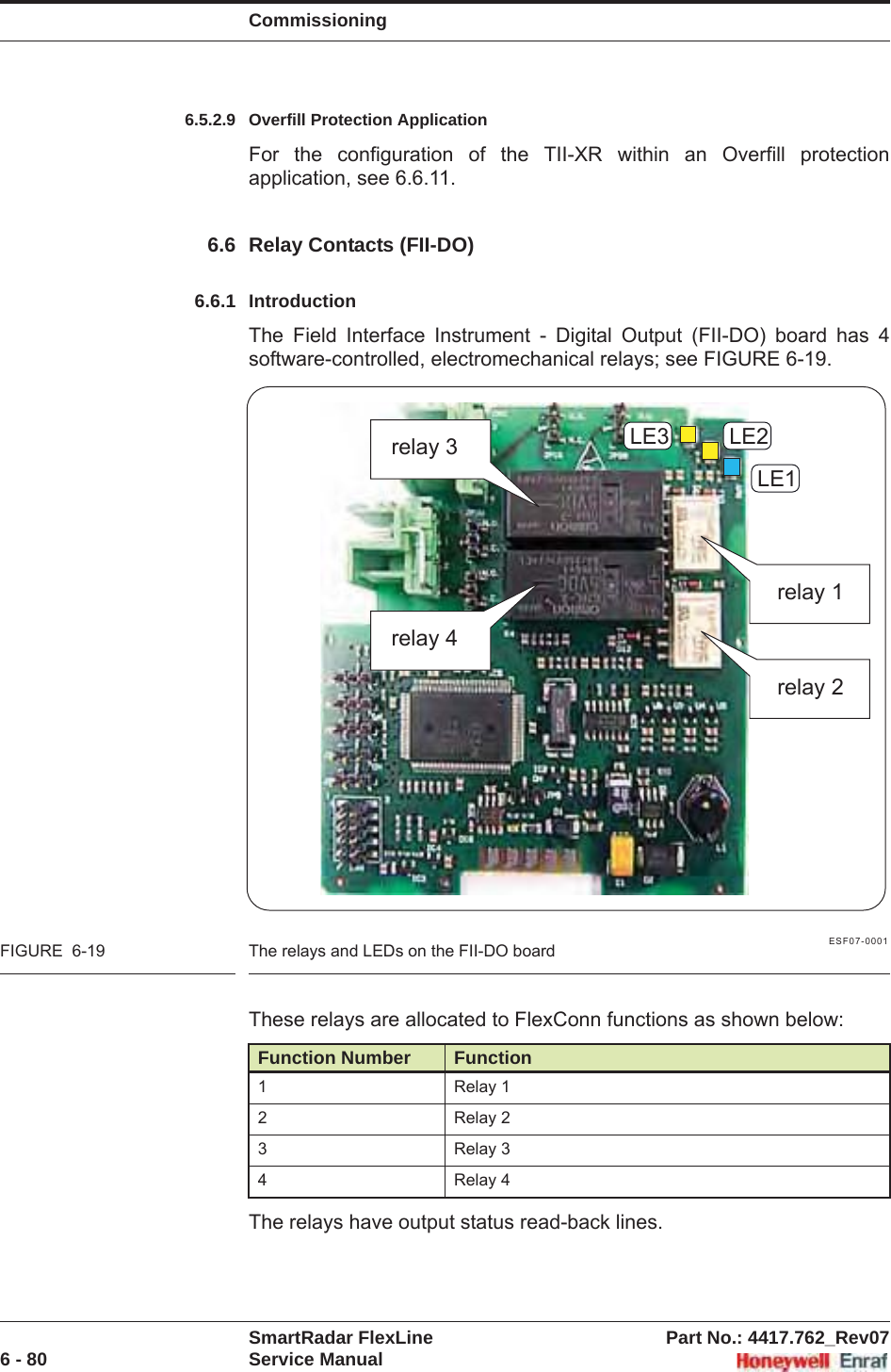
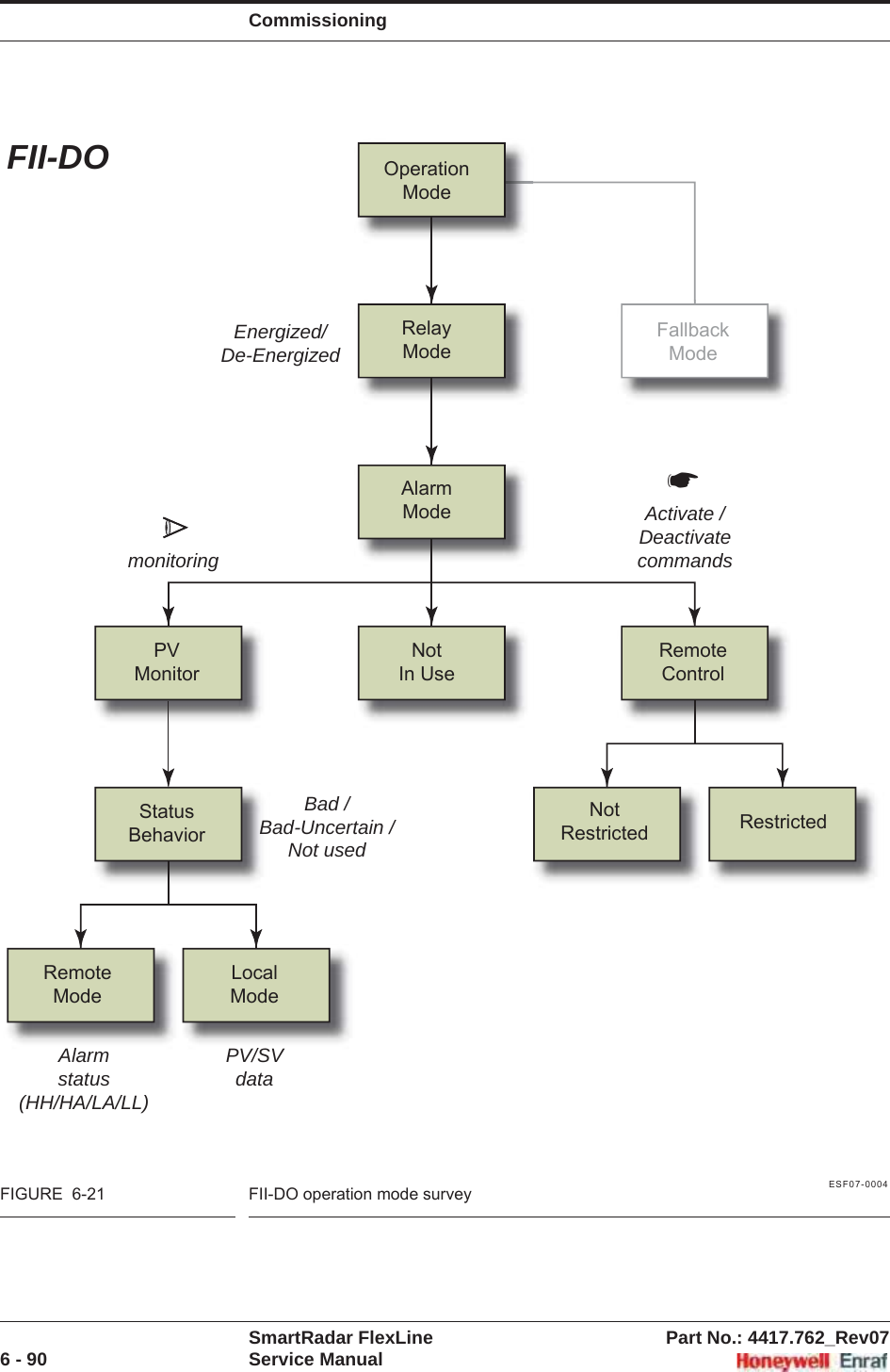
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 81With jumpers, the relays can individually be set to Normally Open (NO) or Normally Closed (NC).In addition to the board’s [Health] LED LE1, the LEDs LE2 and LE3 are available (see FIGURE 6-19). They can be associated to a relay, by setting the [LED Association] entity.☛For a fail-safe level application, continue with section 6.6.10.6.6.2 Operation ModeThe FII-DO can operate in one of two modes: [Alarm Mode] and [Fallback Mode]. This is controlled by the [Operation Mode] entity.Fallback Mode is not implemented yet.☛Set the [Operation Mode] entity to [Alarm Mode].](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-137.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 82 Service Manual6.6.3 Relay Configuration6.6.3.1 Jumper SettingsAt installation, each individual relay contact was configured as required with the hardware jumpers JPx0, where x = Relay 1 to 4 respectively. See FIGURE 6-20.ESF07-0002FIGURE 6-20 The relays’ hardware jumpersNOTE: In the Commissioning stage, no jumper setting can be changed without breaking the compartment screw sealing.6.6.3.2 Relay ModeEach individual relay can be set to be energized or de-energized during operation, by setting the [Relay Mode] entity to <Energized> or <De-energized>respectively.If the [Relay Mode] entity is set to <Energized>, the relay coil will be energized when the relay state is <Deactivated>, and the relay coil will be de-energized when the relay state is <Activated>.If the [Relay Mode] entity is set to <De-Energized>, the relay coil will be de-energized when the relay state is <Deactivated>, and the relay coil will be energized when the relay state is <Activated>.Ryx_bRyx_aJPx0n.o. n.c.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-138.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 83The <Energized> option is used for fail-safe operation whereas the <De-Energized> option is used for non-fail-safe operation.☛Set each individual relay to the required configuration, by selecting the proper entities. See also next overview (fail-safe configuration is coloured).6.6.4 Alarm ModeEach individual relay can operate in one out of three modes, by setting the [Alarm Mode] entity to either [PV Monitor],[Remote Control], or [Not In Use].6.6.4.1 PV MonitorIn [PV Monitor] mode, each individual FII-DO-relay unit can monitor the Primary Value (PV) or Secondary Value (SV) of another board connected to the CAN bus, and either activate or deactivate the associated relay if a certain condition is <True> or <False>.☛If [Remote Control] or [Not In Use] mode must be selected, skip to section 6.6.4.2 or 6.6.4.3 respectively.☛From the [Alarm Mode] menu, select [PV Monitor].☛Select [Monitor Board ID], set proper value.☛Select [Monitor Board Instance], set proper value.☛Select [Monitor Function Instance], set proper value.☛Select [Monitor Source], select either <PV> or <SV>, as desired.The [Monitor Board ID],[Monitor Board Instance], and [Monitor Function Instance]entities determine the location of the entity to be scanned.The [Monitor Source] entity determines if either the Primary Value <PV> or Secondary Value <SV> entity shall be scanned.The behavior of each individual relay in PV Monitor mode is further controlled by the [Monitor Mode] and the [Status Behavior] entities; see next.Physically Configured Relay Mode Relay State Physical ResultNormally Open (NO)De-Energized Activated ClosedDeactivated OpenEnergized Activated OpenDeactivated ClosedNormally Closed (NC)De-Energized Activated OpenDeactivated ClosedEnergized Activated ClosedDeactivated Open](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-139.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 84 Service Manual6.6.4.1.1 Monitor ModeThe [Monitor Mode] entity can either be set to [Remote] or [Local].If the [Monitor Mode] is set to [Remote], the alarm status of the scanned PV or SV is monitored. The alarm status is compared against the value set in the [Remote Threshold Source] entity. The [Remote Threshold Source] entity can be set to <HH>,<HA>,<LA>, or <LL>.Example: If the [Remote Threshold Source] is set to <HH> and a High High Alarm occurs, the relay will be activated. It will not be activated by any other alarms.☛If [Local] [Monitor Mode] is to be set, skip to next bullet ().☛From the [Monitor Mode], select [Remote].☛Select [Remote Threshold Source], set desired value.If the [Monitor Mode] is set to [Local], the scanned PV or SV value is compared against the value set in the [Threshold] entity. The behavior is modified by the [Threshold Mode] and the [Hysteresis] entities. The [Threshold Mode] entity can be set to either <Treat as HA> or <Treat as LA>.If the [Threshold Mode] entity is set to <Treat as HA>, the relay is activated if the scanned PV or SV is greater than or equal to the [Threshold]entity value, and the relay is deactivated if the scanned PV or SV is less than the [Threshold] entity value minus the [Hysteresis] entity value.If the [Threshold Mode] entity is set to <Treat as LA>, the relay is activated if the scanned PV or SV is greater than or equal to the [Threshold]entity value, and the relay is deactivated if the scanned PV or SV is less than the [Threshold] entity value plus the [Hysteresis] entity value.☛From the [Monitor Mode], select [Local].☛Select [Threshold Mode], and choose either <Treat as HA> or <Treat as LA>.☛Select [Hysteresis], set desired value.6.6.4.1.2 Status BehaviorThe Status Behavior entity determines what happens to the relay if the health of the scanned PV or SV differs from Good. The [Status Behavior]should be set to one of the following options: <BAD>,<BAD-UNCERTAIN>,or <Not Used>.If the [Status Behavior] is set to <BAD>, and the scanned PV or SV health is Bad, the respective relay will be activated.If the [Status Behavior] is set to <BAD-UNCERTAIN>, and the scanned PV or SV health is Bad or Uncertain, the respective relay will be activated.If the [Status Behavior] is set to <Not Used>, the respective relay will notbe activated if the scanned PV or SV health is Bad or Uncertain.☛Set the [Status Behavior] entity either to <BAD>,<BAD-UNCERTAIN>, or <Not Used>.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-140.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 85NOTE: This behavior takes priority over the [Remote] or [Local] monitoring. For example: If the [Status Behavior] is set to <BAD>, and the scanned PV or SV health is Bad, the respective relay will be activated regardless of the [Monitor Mode] entity settings. The [Remote] or [Local] option PV or SV checks will then not affect the relay status.6.6.4.2 Remote ControlIn [Remote Control] mode, each individual relay can directly be activated or deactivated, by sending an !Activate! respectively a !Deactivate! command via the CAN bus.The behavior of each individual relay is further controlled by the [Remote Control] mode entity, which can be set to either <Restricted> or <Not Restricted>.If the [Remote Control] mode entity is set to <Not Restricted>, any source can be used to control the relay with an !Activate! or a !Deactivate!command.If the [Remote Control] mode entity is set to <Restricted>, the relay can only be controlled by the source that matches the values set in the [Control Board ID], the [Control Board Instance], and the [Control Function Instance].☛From the [Remote Control] mode menu, select either <Restricted> or <Not Restricted>.☛If Not Restricted was selected, skip to 6.6.4.3.☛Select [Control Board ID], set proper value.☛Select [Control Board Instance], set proper value.☛Select [Control Function Instance], set proper value.6.6.4.3 Not in UseIf an individual relay is not required in a particular application, the [Alarm Mode] entity must be set to <Not In Use>.Example: If a particular application requires only two relays to be used, say relay 1 and 2, then for relay 3 and 4 the [Alarm Mode] entities must be set to <Not In Use>.☛For the FII-DO relays not used within the application, set the [Alarm Mode] entities to <Not In Use>.6.6.5 CommandsThe following commands can be given to the FII-DO:](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-141.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 86 Service ManualActivateDeactivateAcknowledge6.6.5.1 ActivateThe !Activate! command will cause the specified relay to become <Activated>. This command is only available in [Remote Control] mode; see 6.6.4.2.The !Activate! command behavior is modified by the [Time Setting] entity. If the [Time Setting] entity is set to zero, the relay will stay permanently activated until a !Deactivate! command is given.If the [Time Setting] entity is set to a value other than zero, the relay will be activated for a time in seconds equal to the value set in the [Time Setting]entity, then deactivated. During the period the relay is activated, the relay state will be !Time Setting Active!. This is useful for site commissioning.☛For each relay, set the [Time Setting] entity to the desired value.6.6.5.2 DeactivateThe !Deactivate! command will cause the specified relay to become <Deactivated>. This command is only available in [Remote Control] mode; see 6.6.4.2.6.6.5.3 AcknowledgeThe !Acknowledge! command will cause the specified relay to be physically deactivated, but the relay status will be set to !Acknowledged!.This command is only available in [PV Monitor] mode; see 6.6.4.1. This command can only be given when the concerned relay has already been activated.For example, this command is useful if the relay is connected to an alarm system. The alarm can be silenced by the command, but it is still possible to determine if an alarm has occurred. When the alarm condition is then removed, the relay state will become deactivated, and normal operation will resume.6.6.6 LED AssociationDepending on the value set in the [LED Association] entity, the 4 individual relays on the FII-DO board can be associated with one out of 2 LEDs, LE2 or LE3 (see FIGURE 6-19).The associated LED will be ON when the relay state is <Activated>, and the LED will be OFF when the relay state is <Deactivated>.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-142.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 87NOTE: The LEDs do not indicate the physical relay state (coil state or contacts state), as this depends on the software settings and the physical settings (jumper), see 6.6.3.☛Set the value of the [LED Association] entity as desired (optional). For an example, see table below.6.6.7 Terminal Allocation*) See jumper settings, section 6.6.3.1.LED Association LED Number Relay Number1 + 2 LE2 1LE3 23 + 4 LE2 3LE3 4Terminal Number Name Function14 Ry1_a Relay 1 Common15 Ry1_b Relay 1 NO or NC*16 Ry2_a Relay 2 Common17 Ry2_b Relay 2 NO or NC*18 Ry3_a Relay 3 Common19 Ry3_b Relay 3 NO or NC*20 Ry4_a Relay 4 Common21 Ry4_b Relay 4 NO or NC*](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-143.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 88 Service Manual6.6.8 Commissioned Entities☛By using the table below, make sure all entities are commissioned.The [Commissioned] entity will display either <True> if the function is commissioned or <False> if the function is not commissioned. To commission the function, the entities must be set in accordance with the table below.Operation Mode AlarmModeRemoteControl Mode Parameters CommissionedAlarm Mode Remote ControlRestricted [Control Board ID] >=1 and <=255[Control Board Instance] >=0 and <=7[Control Function Instance] >=1 and <=15[Time Setting] = 0<True>[Control Board ID] <1 or >255[Control Board Instance] <0 and >7[Control Function Instance] <1 and >15[Time Setting] z 0<False>NotRestricted[Time Setting] = 0 <True>[Time Setting] z 0 <False>PV Monitor Remote [Monitor Board ID] >=1 and <=255[Monitor Board Instance] >=0 and <=7[Monitor Function Instance] >=1 and <=15[Time Setting] = 0<True>[Monitor Board ID] <1 or >255[Monitor Board Instance] <0 and >7[Monitor Function Instance] <1 and >15[Time Setting] z 0<False>Local [Monitor Board ID] >=1 and <=255[Monitor Board Instance] >=0 and <=7[Monitor Function Instance] >=1 and <=15[Time Setting] = 0[Threshold] = value entered[Hysteresis] = value entered<True>[Monitor Board ID] <1 or >255[Monitor Board Instance] <0 and >7[Monitor Function Instance] <1 and >15[Time Setting] z 0[Threshold] = value entered[Hysteresis] = value entered<False>Not In Use N/A N/A <True>Fallback ModeN/A N/A N/A <False>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-144.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 896.6.9 Board Commissioned EntityThe [Board Commissioned] entity will display either <True> if all functions are commissioned or <False> if any of the functions are not commissioned.☛If the [Board Commissioned] entity displays <False>, check each function parameter again. Use the table from 6.6.8.6.6.10 Fail-safe Level ApplicationFollowing steps include all commissioning-aspects settings for the Fail-safe level application.☛The corresponding jumper of the concerned relay must be in the Normally Open (NO) state (= default setting).NOTE: In the Commissioning stage, no jumper setting can be changed without breaking the compartment screw sealing. See also section 6.6.3.1.☛Set [Operation Mode] to [Alarm Mode].☛Set [Relay Mode] to <Energized>.☛Set [Alarm Mode] to [PV Monitor].☛Set [Monitor Board ID] to <board id> of product-level board.☛Set [Monitor Board Instance] to <board instance> of related product-level board.☛Set [Monitor Function Instance] to <function instance> of related product-level board.☛Set [Monitor Source] to <PV>.☛Set [Monitor Mode] to [Remote].☛Set [Remote Threshold Source] to <HH>,<HA>,<LA>, or <LL>.☛Set corresponding alarm setting of the related product-level board.☛Set [Status Behavior] to <BAD-UNCERTAIN>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-145.png)
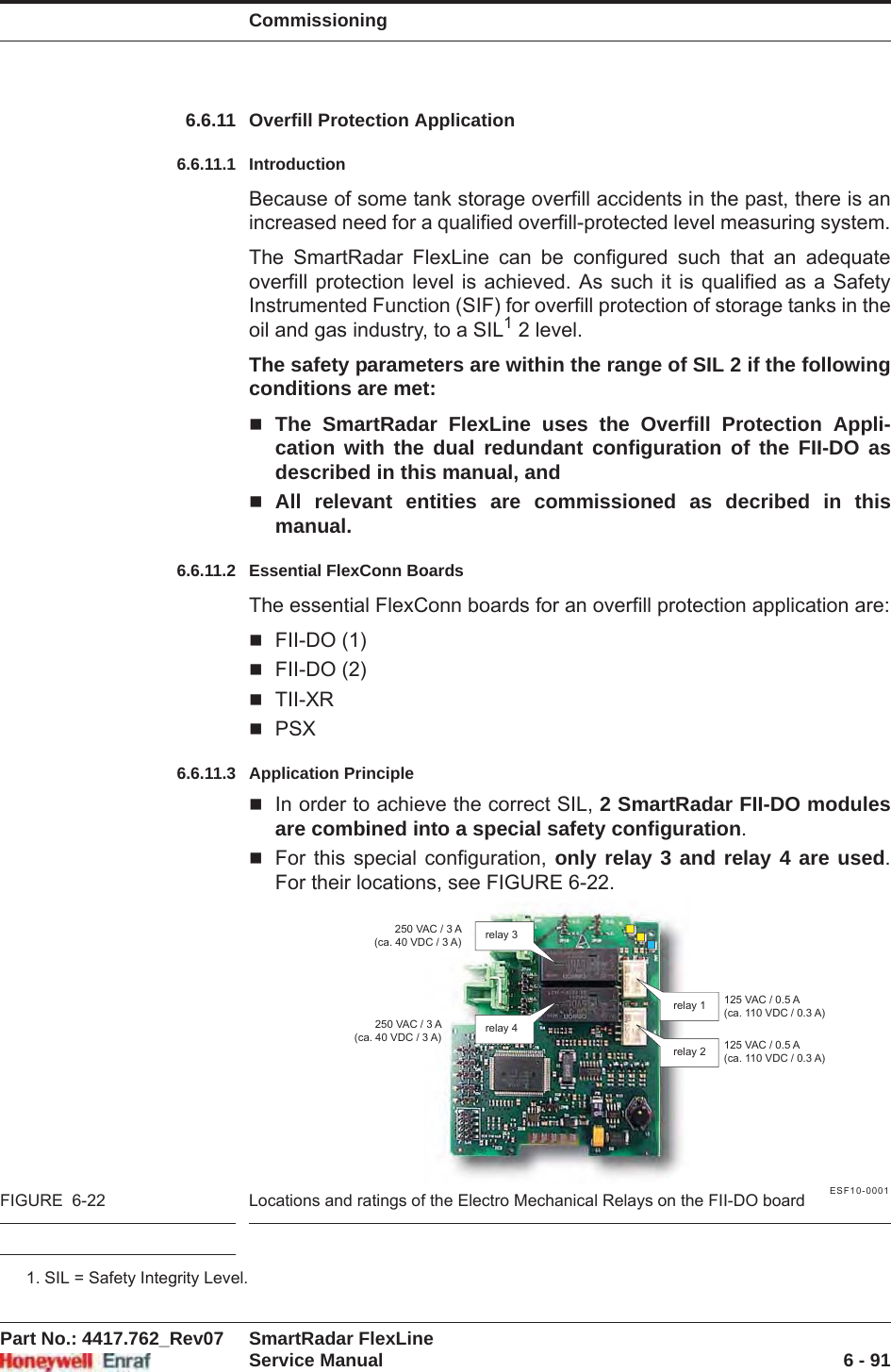
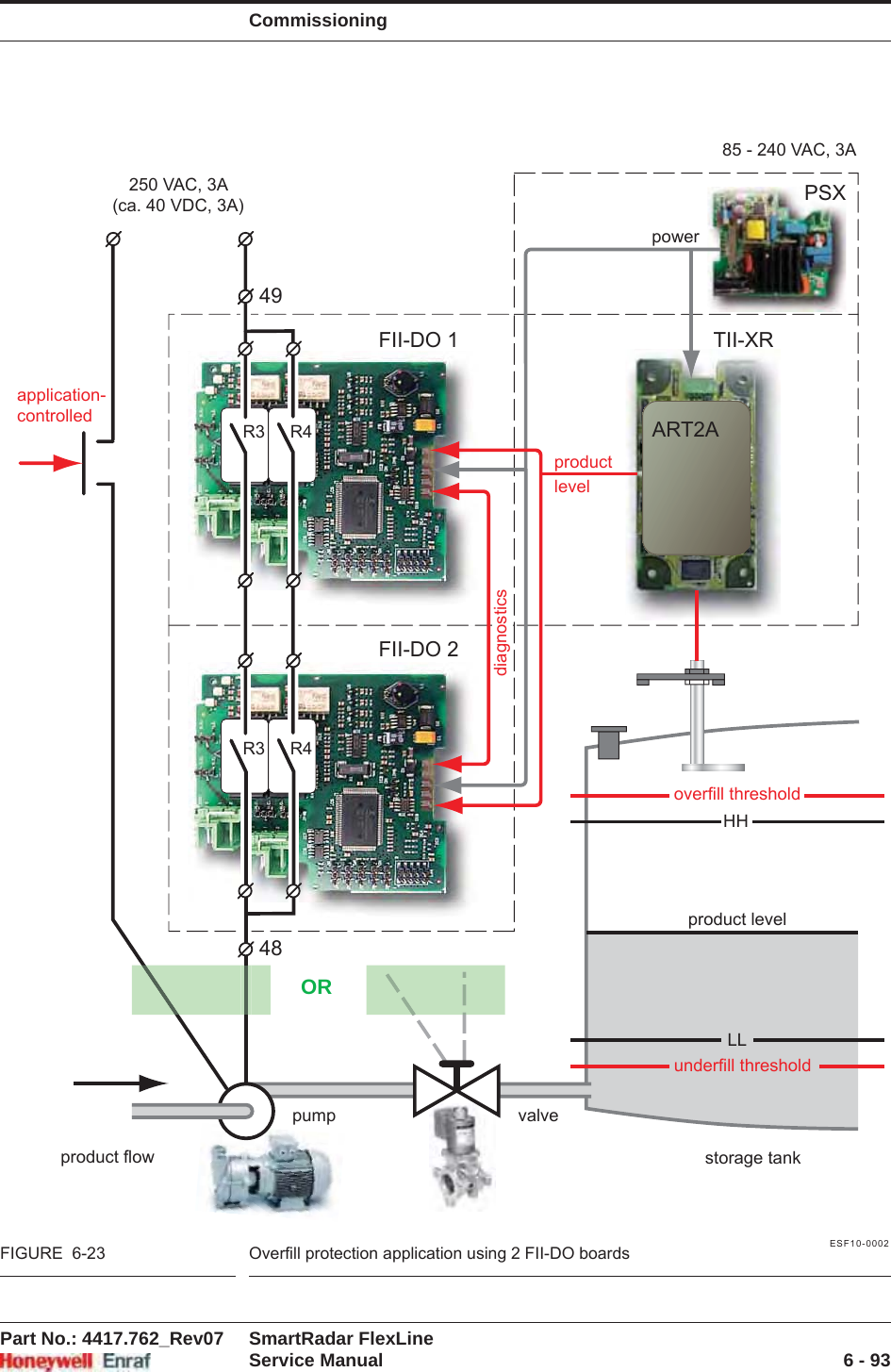
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 96 Service Manual6.6.11.6 Overfill Protection Application Wiring☛Connect the external wiring (see illustrations below):• Connect terminal 48 to the pump or to the valve.• Connect terminal 49 to the mains.6.6.11.7 Commissioning the Overfill Protection ApplicationTo configure the Overfill Protection Application all essential boards needs to be configured.6.6.11.7.1 FII-DO (redundant)☛Make sure all jumpers are set to Normally Open (N.O.). See 6.6.3.1.☛Set the [Board Instance] entity of each FII-DO board to a different value (e.g. 0 and 1).The boards are redundant and share the same board ID, so to be able to address the board uniquely by the internal (CAN-bus) or external FlexConn protocol, the board instance must be different to distinguish the boards from each other.☛Set the [Counterpart Board Instance] entity of each FII-DO board to the [Board instance] of the counterpart FII-DO board (redundant board).R3R3R4R4Ry3_b Ry4_b19 21Ry3_a Ry4_aRy3_b Ry4_bRy3_a Ry4_a18 2019 2118 20Ofp_bOfp_a4948CN3 FII-DO 1CN3 FII-DO 214 15 16 1718 19 20 21FII-DO 114 15 16 1718 19 20 21FII-DO 2CN2 (R1 + R2)CN3 (R3 + R4)Ofp_b49 Ofp_a48](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-152.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 97☛Set the [Relay Mode] entity of R3 and R4 relay to <Normally Energized> forboth FII-DO boards.☛Set the [Alarm Mode] entity of R3 and R4 relay to <PV Monitoring> for both FII-DO boards.☛Set the [Monitor Mode] entity of R3 and R4 relay to <Local> for both FII-DO boards.☛Set the [Threshold] entity and [Hysteresis] entity of R3 and R4 relay to the application-specific desired values, for both FII-DO boards iden-tically.☛For overfill protection, configure the [Threshold] entity above the HA and HH setting of the TII-XR board. Entities [High alarm] and [High high alarm].☛For underfill protection, configure the [Threshold] entity below the LA and LL setting of the TII-XR board. Entities [Low alarm] and [Low low alarm].☛For overfill protection, configure the [Threshold Mode] entity of R3 and R4 relay to <Treat as HA> for both FII-DO boards.The threshold will now be approached as high alarm above [Highalarm] and [High high alarm], with the relevant hystresis behaviour.☛For underfill protection, configure the [Threshold Mode] entity of R3 and R4 relay to <Treat as LA> for both FII-DO boards.The threshold will now be approached as low alarm below [Low alarm] and [Low low alarm], with the relevant hysteresis behaviour.☛Set the other relevant entities:The [Overfill Protection Status] entity shows the Overfill Protection Status of each FII-DO board. <H> = Healthy<W> = Gauge alarm (Warning)<O> = Overfill alarmWith the [Safety shut down timer] entity, the user can set the time that a safe shutdown will be forced when only an error or failure in one relay chain is detected. Default value: <0>: Safety Shutdown Timer DISABLED.NOTE: This is an enhanced safety function. When one potential fail situation is detected in one chain, the other chain will be forced to fail safe (contacts opened) after the safety shut down time.Philosophy: the first detected fail will not result in a shut down directly but should be solved within a certain time.If the Safety shut down timer is enabled, so value z<0>, then operation can continue with one branch till second fault is detected.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-153.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 98 Service ManualIn other words, this means: In case an anomaly is deteced by the internal gauge diagnostics, the gauge needs service within the time set by this timer. Typical value: <72> hours.If the Safety shut down time is disabled, so value = <0>, then the customer wants to continue permanently with the other branch.NOTE: When the "Safety shut down timer" is active or running, the remaining time until shutdown can be inspected by reading the [Safety shut down timer left] entity.6.6.11.7.2 TII-XR☛Set the [Overfill Protection Function] entity to <Enabled>.☛Set the [First Relay Board Instance] entity of the [Board Instance] entity to the first FII-DO board.☛Set the [Second Relay Board Instance] entity of the [Board Instance] entity to the second FII-DO board.The "Maximum Safe Fill" mechanism of the TII-XR should be ignored for the SmartRadar FlexLine overfill protection application.When the "Maximum Safe Fill" level is configured lower than the Over fill Threshold, the PV status becomes BAD much earlier, and the FII-DO will open the contacts.☛Set the [Maximum safe fill level] entity above the [Threshold] values of the FII-DO boards when used for overfill protection.OR☛Set the 9th switch [Compensations and features] entity to <FALSE>.6.6.11.7.3 PSX (Power Supply)CAUTION! The Overfill Protection Application may ONLY be powered by AC mains. Only 85VAC - 240 VAC can be used for mains connected to the SmartRadar FlexLine having the Overfill Protection Application option.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-154.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 996.6.11.8 Proof TestingBy activating the command [Start Proof test] entity, the FII-DO simulates an overfill or underfill. The remainder of the SIF should work as expected (e.g. close a valve, stop a pump, generate an alarm) this should be validated.NOTE: This test must only be performed in a healthy situation when the product level in the tank is below the overfill threshold or above the underfill threshold.During the proof test - when the level is simulated above or below the threshold - the "Overfill protection status" will indicate "O" in order to enable checking the "Proof test" results in the control room as well.Each FII-DO of the overfill protection application implements the proof test functionality, so the proof test has to be performed successively for both modules.By activating the command [Stop Proof test] entity, the FII-DO returns to normal overfill analysis mode again.NOTE: The FII-DO module of the SmartRadar FlexLine overfill protection safety application implements an automatic termination of the "Proof test" function in case the user forgets the command [Stop Proof test].☛Set the [Proof test termination time out] entity to the most desired value in minutes:•<0> (auto termination off)•<5> (default)•<10>•<20>•<30>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-155.png)
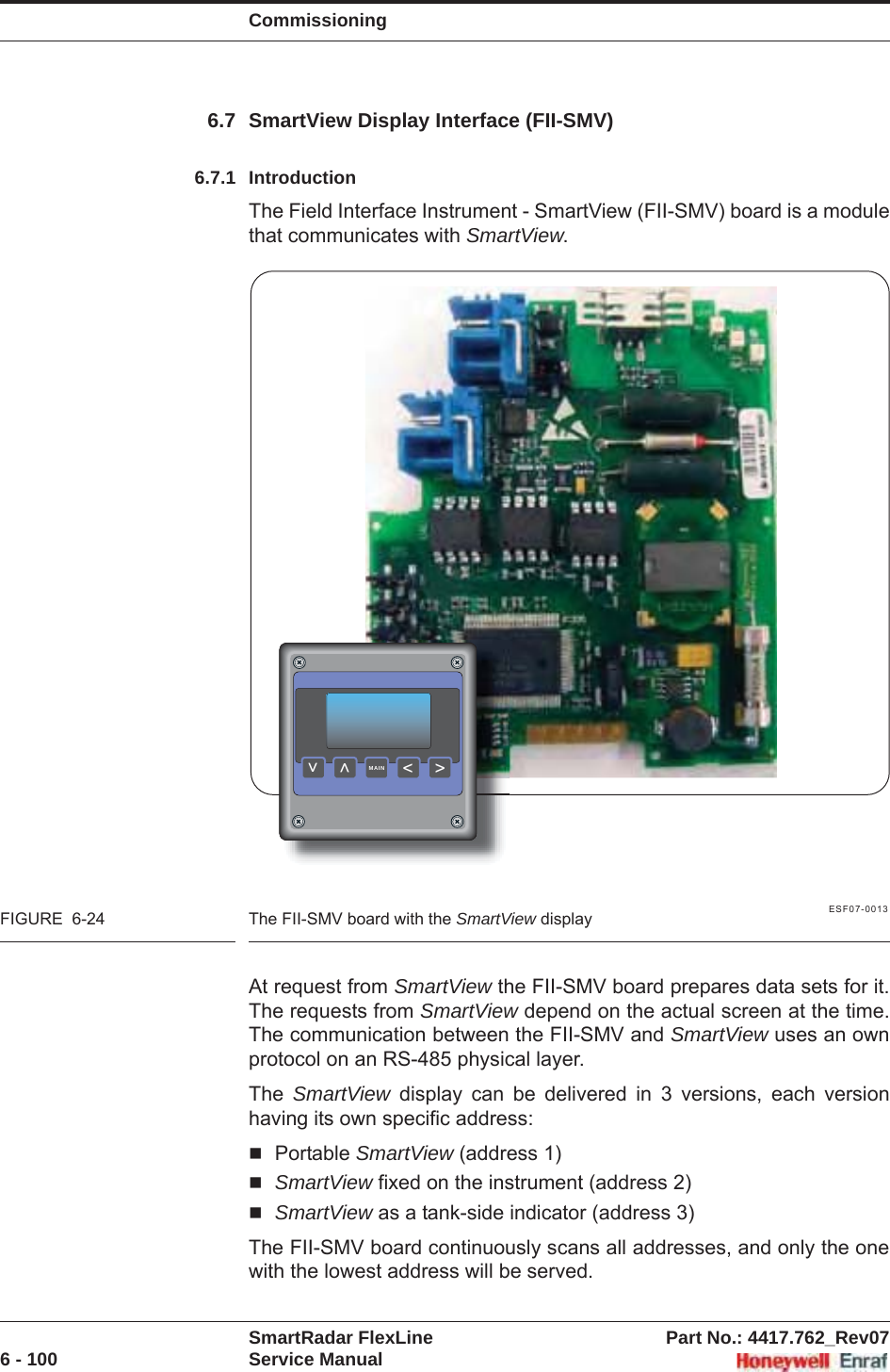
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 101So, for example, if a stand-alone SmartView (address 3) and an integrated SmartView (address 2) are connected, the stand-alone SmartView (address 3) will be served as soon as the integrated SmartView (address 2) is closed (set to idle).6.7.2 Commissioning the FII-SMVFor a correct functioning of the FII-SMV module in an instrument the following entities can be set by using either Engauge or SmartView.☛By using the following table, check each entity for correctness.Name Value Range Default Value Explanation[Decimal separator] <point><comma><point> The decimal separator in which entities are shown on the SmartView display.[Tenth millimeter selection] <enable><disable><enable> Determines whether the tenth millimeter is shown on the display in the [PV screen]in case a level entity is shown.[Identification] 8 characters e.g.<TANK1234><--------> Name of a tank or instrument. This string is visible within a [PV screen].[Password] <......> 6 characters <ENRAF2> The password SmartViewuses for entering the protected level.Note: Some settings reside under the protected level.[Function identification] <......> 13 characters <SmartView mst> The name of the current function of this module. This name is visible on the SmartView display.[Extra information switch] <level temperature><Info Switch><Info Switch> Determines whether the [extra information] screen on the SmartView will display level and temperature or extra information from a specific function.[Extra info board ID] <01......XX> 2 digits <01> Board ID of the board that has the [extra information] to display. In case of OneWireless, the ID = 12.[Extra info board instance] <00......XX> 2 digits <00> Board instance of the board that has the [extra information]to display.[Extra info function instance] <01......XX> 2 digits <01> Function instance that has extra information to display.In case of OneWireless, this = 01.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-157.png)
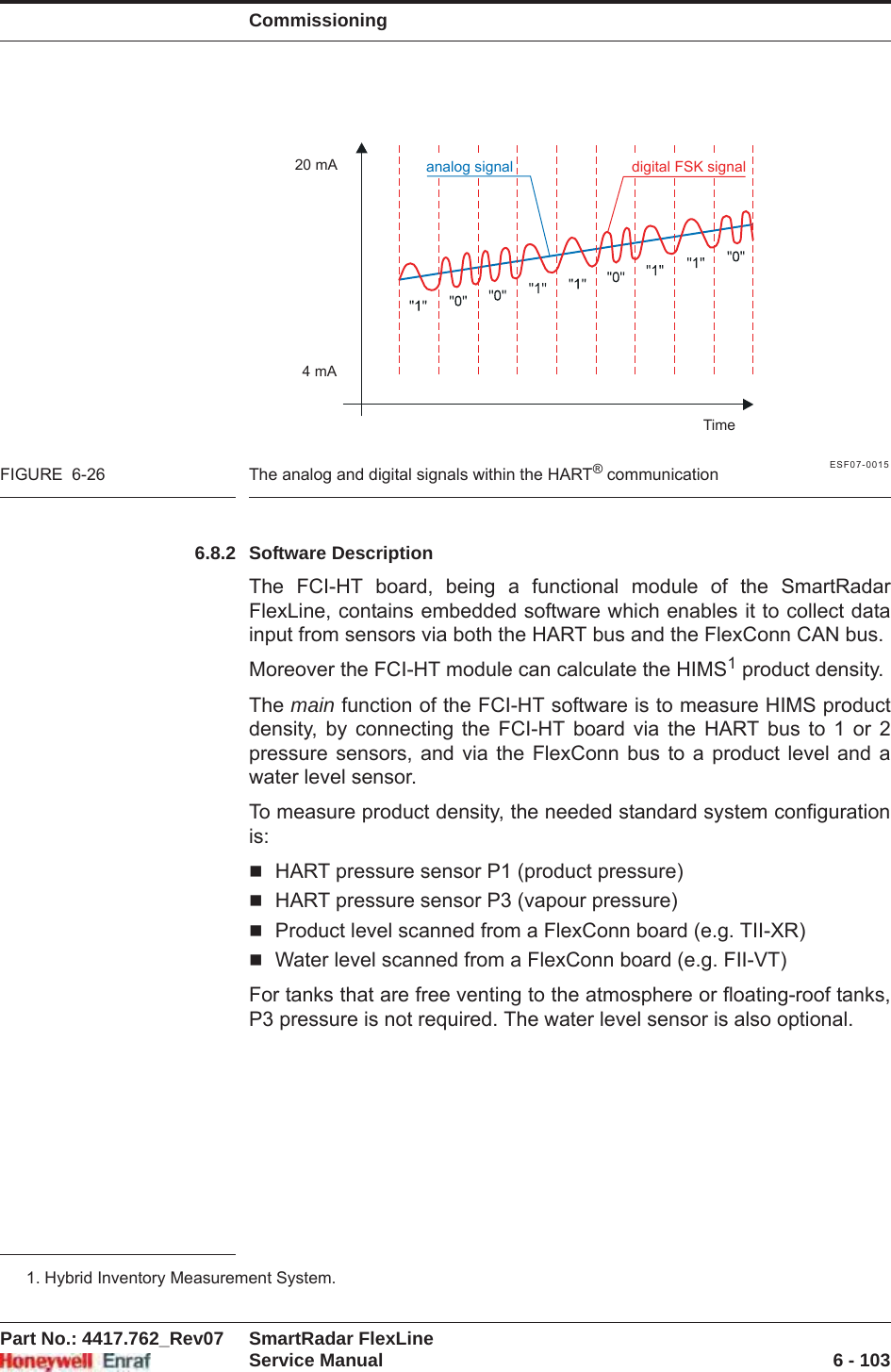
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 102 Service Manual6.8 Pressure & Density Measurement and Other HART Inputs (FCI-HT)6.8.1 IntroductionThe Field Communication Instrument - HART (FCI-HT) board is a HART®1 master module that enables hybrid-signal (both analog + digital) communication between the FlexConn instrument and a HART sensor.ESF07-0014FIGURE 6-25 The FCI-HT boardThe HART protocol is a bi-directional master-slave communication protocol, which is used to communicate between intelligent field instruments and host systems.The FCI-HT board has a planar transformer for galvanic isolation from the HART bus. See FIGURE 6-25.LED LE1 is the board’s [Health] LED. LEDs LE2 and LE3 will be flashing to indicate activity on the HART bus. LE2 indicates data is being transmitted (Tx), LE3 indicates data is being received (Rx).With the HART protocol, an analog 4-20 mA signal can be combined with a digital Frequency Shift Keying (FSK) signal. See FIGURE 6-26.1. Highway Addressable Remote Transducer.LE1LE2LE3planartransformer](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-158.png)
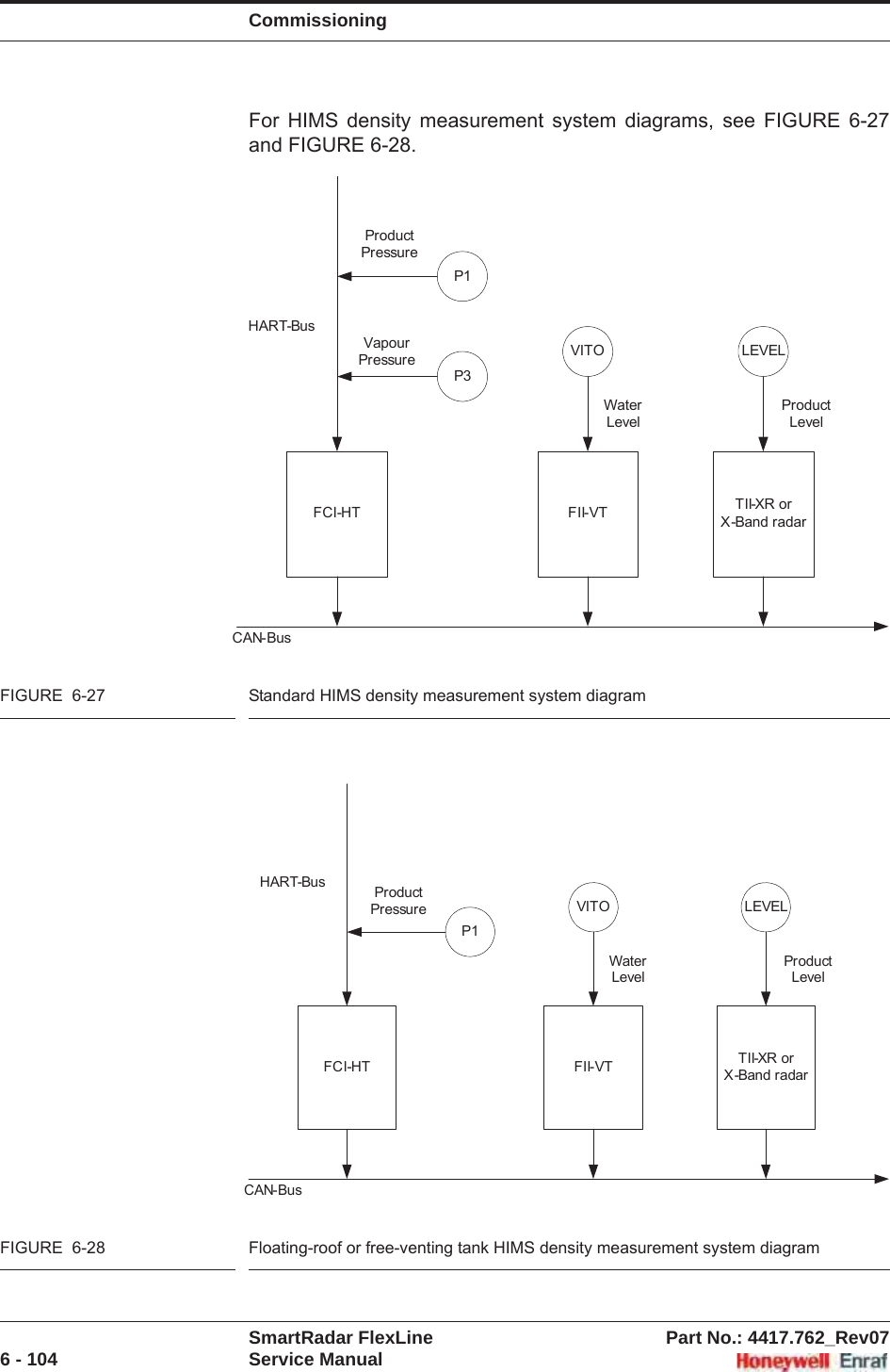
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 105As an alternative function, the FCI-HT board also allows the connection of up to 5 generic HART sensors operating in multi-drop digital mode or one generic HART sensor operating in analog mode.In the multi-drop digital mode situation, one or two of the generic HART sensors can be [P1 Pressure] or [P3 Pressure], providing product pressure and vapour pressure respectively, but no HIMS density calculation will be available.The HART sensors and HIMS density measurement are allocated to a function number in the FCI-HT software. See table below.TABLE 6-1 FlexConn function allocationFunction 1 is exclusively reserved for P1 pressure, Function 2 is exclusively reserved for P3 pressure, and Function 8 is exclusively reserved for HIMS density calculation.Only one of each type of HART device can be allocated to a function. Therefore this limits the number of HART devices of each type that can be fitted.Example 14 HART pressure devices and 1 temperature device can be connected.P1 pressure device allocated to Function 1P3 pressure device allocated to Function 2one pressure device allocated to Function 5one pressure device allocated to Function 7the temperature device allocated to Function 4FlexConn Function Device TypeFunction 1 [P1 Pressure]Function 2 [P3 Pressure]Function 3 [Distance]Function 4 [Temperature]Function 5 [Pressure]Function 6 [Density]Function 7 [Other]Function 8 [HIMS Density]](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-161.png)
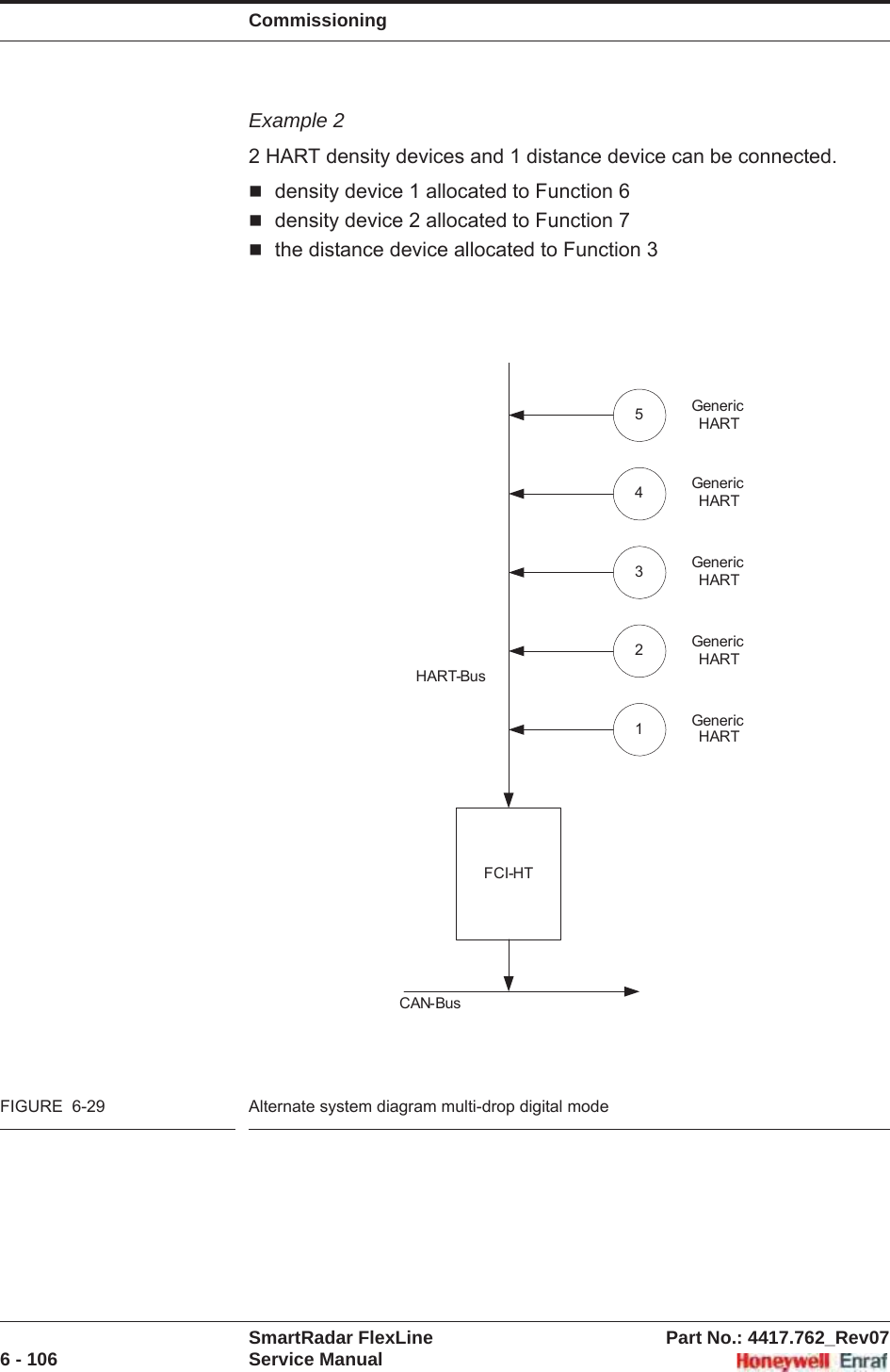
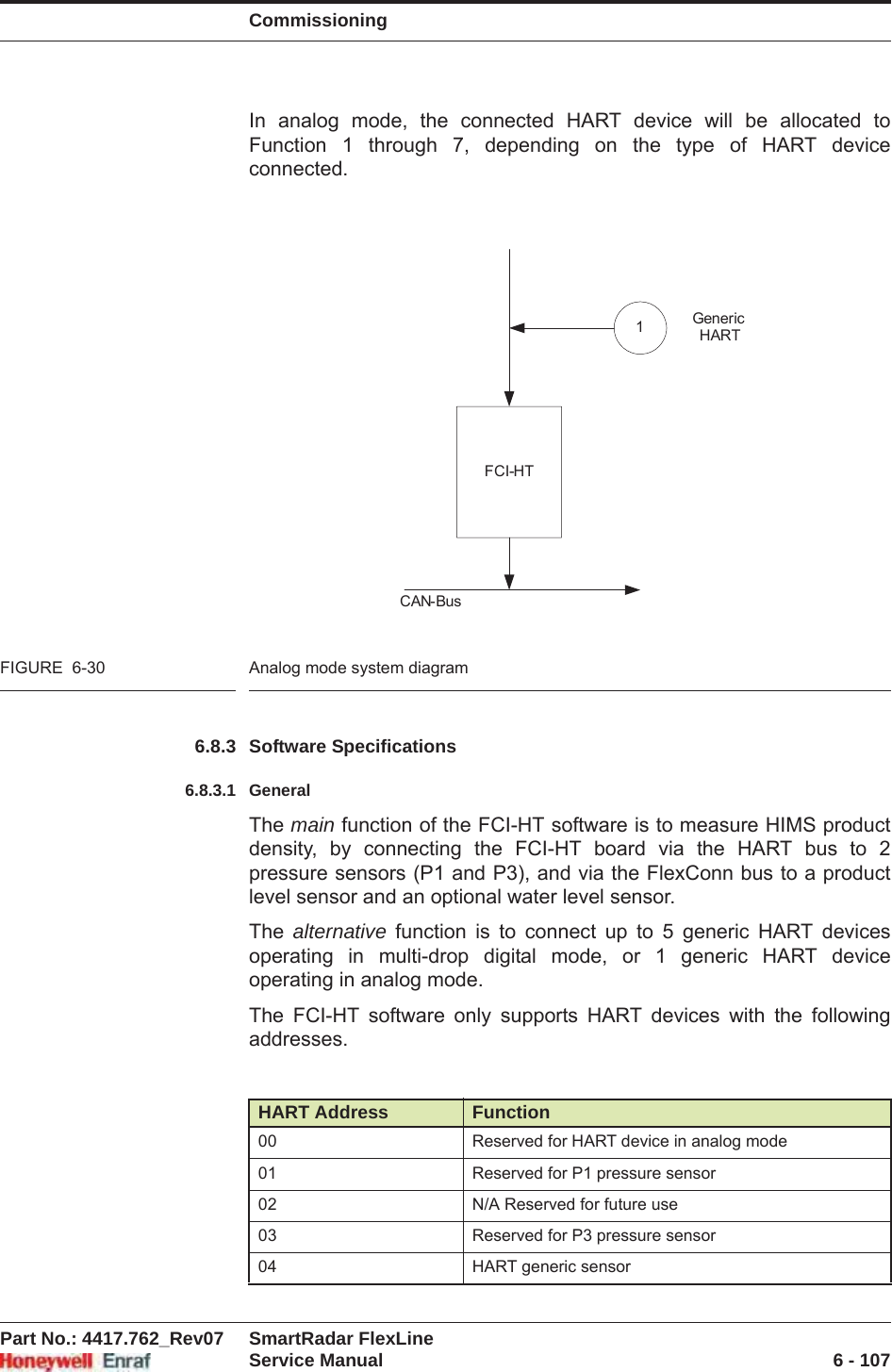
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 108 Service ManualTABLE 6-2 Accepted HART addresses☛Before proceeding with commissioning, first check the maximum start-up current of all connected HART devices.☛Make sure the HART address of the installed device(s) are in accordance with TABLE 6-2.6.8.3.2 P1 PressureThe FCI-HT software only accepts the Primary Value of a P1 pressure HART device in SI units kilo Pascals (kPa). ☛Make sure the P1 pressure HART device is configured to output data in kilo Pascals (kPa). If not, correctly configure as yet, by using an appropriate HART configuration tool.TABLE 6-3 Accepted PV unit for a P1 HART deviceNOTE: The Secondary and Tertiary values of a P1 pressure HART device may be any units.The PV of the P1 pressure HART device is read and converted into SI Units Pascals (Pa) within the FlexConn function PV.The value is filtered, and the filtering factor depends on the value set in the entity [P1 Integration time]. A higher value gives more filtering, and a lower value gives less filtering.05 HART generic sensor06 HART generic sensor07 HART generic sensor08 HART generic sensor09 HART generic sensor10 HART generic sensor11 HART generic sensor12 HART generic sensor13 HART generic sensor14 HART generic sensor15 HART generic sensorSensor Type Accepted HART PV Unit Abbreviation HART PV Unit CodeP1 Pressure Kilo Pascal kPa 12HART Address Function](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-164.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 109The correction factor stored in the [P1 PV offset] entity is then subtracted from the filtered value. If the [P1 PV offset] entity = 0 no offset is applied.Depending on the [PV selected type] entity, the P1 pressure can be displayed as either absolute pressure or relative pressure.TABLE 6-4 P1 pressure displayed unit typesIf Relative pressure is selected, the value stored in the [Ambient Air Pressure] entity is added to the measured pressure. If Absolute pressure is selected, no factor is added. The final result is available in the [PrimaryValue] entity.NOTE: Absolute pressure is used in the density calculation; the relative pressure is only displayed in P1 [PrimaryValue].For the FCI-HT software to differentiate between a HART device malfunction and a HART device not actually installed, P1 pressure has the entity [P1 Installed] which must be set to either <Installed> if a P1 pressure HART device is actually fitted or <Not Installed> if a P1 pressure HART device is not actually fitted.The Secondary and Tertiary values of a P1 pressure HART device are not converted, and they are simply translated from the HART device to the FlexConn environment.6.8.3.3 P3 PressureThe FCI-HT software only accepts the Primary Value of a P3 pressure HART device in SI units kilo Pascals (kPa). ☛Make sure the P3 pressure HART device is configured to output data in kilo Pascals (kPa). If not, correctly configure as yet, by using an appropriate HART configuration tool.TABLE 6-5 Accepted PV unit for a P3 HART deviceNOTE: The Secondary and Tertiary values of a P3 pressure HART device may be any units.PV Unit Type Display Unit Type PV selected typeP1 Pressure Absolute 1Relative 2Sensor Type Accepted HART PV Unit Abbreviation HART PV Unit CodeP3 Pressure Kilo Pascal kPa 12](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-165.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 110 Service ManualThe PV of the P3 pressure HART device is read and converted into SI Units Pascals (Pa) within the FlexConn function PV.The value is filtered, and the filtering factor depends on the value set in the entity [P3 Integration time]. A higher value gives more filtering, and a lower value gives less filtering.The correction factor stored in the [P3 PV offset] entity is then subtracted from the filtered value. If the [P3 PV offset] entity = 0 no offset is applied.Depending on the [PV selected type] entity, the P3 pressure can be displayed as either absolute pressure or relative pressure.TABLE 6-6 P3 pressure displayed unit typesIf Relative pressure is selected, the value stored in the [Ambient Air Pressure] entity is added to the measured pressure. If Absolute pressure is selected, no factor is added. The final result is available in the [PrimaryValue] entity.NOTE: Absolute pressure is used in the density calculation; the relative pressure is only displayed in P3 [PrimaryValue].For the FCI-HT software to differentiate between a HART device malfunction and a HART device not actually installed, P3 pressure has the entity [P3 Installed] which must be set to either <Installed> if a P3 pressure HART device is actually fitted or <Not Installed> if a P3 pressure HART device is not actually fitted. For example, in the case of free-venting tanks, P3 would usually not be installed.If the P3 pressure status is <Good Actual>, the P3 pressure value is also stored in memory in the [Last Valid P3] entity, to allow recovery from a power-down situation when a P3 pressure is not available.If the measured P3 pressure is invalid (e.g. HART scan error), the software will check the [P3 Installed] entity to determine if P3 is actually fitted. If P3 is fitted, the software will check for a [Manual P3 Pressure] entity value to be entered. If no manual P3 pressure value is entered, the [LastValid P3] is used in the density calculation. If no [Last Valid P3] is available, an error will be reported.If P3 pressure is not installed - in the case of free-venting tanks - a default value of 0.0 for P3 pressure is used for density calculations.PV Unit Type Display Unit Type PV selected typeP3 Pressure Absolute 1Relative 2](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-166.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 111The Secondary and Tertiary values of a P3 pressure HART device are not converted, and they are simply translated from the HART device to the FlexConn environment.6.8.3.4 HIMS DensityTo make HIMS density calculation possible, the relevant entity values must be available. See also FIGURE 6-31.☛Read also the Instruction Manual HIMS pressure measurement.☛Enter the appropriate values into the following entities:[Distance P1 to Zero Level][Distance P3 to Zero Level][Hydrostatic Deformation Level][Hydrostatic Deformation Factor][Local Gravity][Minimum HIMS Level][HIMS Level Hysteresis][Ambient Air Density][Tank Vapour Density]ESF07-0022FIGURE 6-31 HIMS configuration principleTo calculate HIMS density, the following valid data must be available:P1 pressureP3 pressureProduct levelWater level (optional)datum plate (zero level)P3P1[Distance P3 to Zero Level][Distance P1 to Zero Level][Minimum HIMS Level]](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-167.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 112 Service ManualThe software analyses the status of these 4 (3) inputs, to determine the value and status of the [HIMS Density PV].If the HIMS Density PV status is <Good Actual>, the HIMS Density PV value is also stored in memory in the [Last Valid Density] entity, to allow recovery from a power-down situation when a HIMS Density PV value is not available.If any of the 4 input statuses are bad, the software will check for a [Manual Product Density] entity value to be entered. If a [Manual Product Density] entity value is entered, this value will be used for the HIMS Density PV. If no [Manual Product Density] entity value is entered, the software will check if a [Last Valid Product Density] entity value was stored. If a[Last Valid Product Density] entity value was stored, this value will be used for the HIMS Density PV. If no [Manual Product Density] or [Last Valid Product Density] entity value is found, an error will be reported.When calculating HIMS Density, the software will check for a negative density value. If the value is negative, the same manual or last-valid mechanism is used as described before. If the value is positive, HIMS Density is calculated.When calculating HIMS Density, in order to achieve a valid result, the software will also check if the product level is above the [Minimum HIMS Level] entity value. If this condition is <True>, HIMS Density is calculated. If the product level is below the [Minimum HIMS Level] entity value, the same manual or last valid mechanism is used as described before.When calculating HIMS Density, if the [Water Level Correction] entity is <Enabled>, the software will check if the scanned water level <= [Distance P1 to Zero Level]. If this is <True>, the HIMS Density is calculated. If the water level > [Distance P1 to Zero Level], the same manual or last valid mechanism is used as described before. If [Water Level Correction] entity is <Disabled>, the software will not check the scanned water level.6.8.3.5 Generic HART DevicesThe FCI-HT software only accepts Generic HART devices at addresses 0 and 4 through 15 with the required sensor type configured.The generic HART devices are scanned sequentially from address 0 and then address 4 through 15. When a device is detected, initially the HART PV unit code is checked against TABLE 6-7 in the following order: Distance, Temperature, Pressure, and Density.Sensor Type Accepted HART Units Abbreviation HART Unit CodePressure Pounds per square inch psi 6Pascal Pa 11Kilo Pascal kPa 12](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-168.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 113TABLE 6-7 Accepted units for generic HART devicesIf an accepted HART PV unit code is found, the HART device is allocated to the relevant FlexConn function as detailed in TABLE 6-8.If the HART PV unit code is not accepted, the HART SV unit code is checked against TABLE 6-7 in the following order: Distance, Temperature, Pressure, and Density. If an accepted HART SV unit code is found, the HART device is allocated to the relevant FlexConn function as detailed in TABLE 6-8.The process is repeated for the HART TV unit code.If none of the unit codes are accepted, the device is allocated to Function 7.☛If a generic HART device output is not in the accepted units, configure it to accepted units output data, by using the HART config-uration tool.TABLE 6-8 FlexConn function allocationOnce a device has been allocated to a function, the HART PV, SV, and TV are translated into the FlexConn function’s PV, SV, and TV.The required sensor value of the generic HART device may not be in the HART PV but it is translated into the FlexConn PV.Example:Temperature Degrees Celsius °C 32Degrees Fahrenheit °F 33Distance Feet ft 44Meters m 45Inches in 47Density Kilograms per cubic meter kg/m392Pounds per cubic foot lb/ft394Degrees API API 104FlexConn Function Device TypeFunction 1 [P1 Pressure]Function 2 [P3 Pressure]Function 3 [Distance]Function 4 [Temperature]Function 5 [Pressure]Function 6 [Density]Function 7 [Other]Function 8 [HIMS Density]Sensor Type Accepted HART Units Abbreviation HART Unit Code](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-169.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 114 Service ManualA HART temperature sensor may have a PV unit code Ohms, and a SV unit code Celsius. The required sensor value is temperature in Celsius, and this is translated into the FlexConn PV, and the Ohms value is translated into the FlexConn SV.Translation is performed in the order: PV (Distance, Temperature, Pressure, and Density), SV (Distance, Temperature, Pressure, and Density), TV (Distance, Temperature, Pressure, and Density).The required sensor value read from the generic HART devices will be converted into SI Units within the FlexConn PV as shown in TABLE 6-9.The other sensor values of a generic HART device are not converted, and they are simply translated from the HART device environment into the FlexConn environment SV and TV.TABLE 6-9 Generic HART device units into FlexConn PV unit translation6.8.3.6 Function IdentificationFunctions 1 through 8 are identified by the entities: [Function Category],[Function Type], and [Function Sub-type].Their default identification information is detailed in TABLE 6-10.Accepted HART Units Abbreviation FlexConn PV Unit Translation AbbreviationPounds per square inch psi Pascal PaPascal PaKilo Pascal kPaDegrees Celsius °C Celsius °CDegrees Fahrenheit °FFeet ft Meters mMeters mInches inKilograms per cubic meter kg/m3Kilograms per cubic meterkg/m3Pounds per cubic foot lb/ft3Degrees API APIFunction Allocation Function Category Function Type Function Sub-typeFunction 1 P1 Pressure Sensor (1) Product pressure (5) (6)Function 2 P3 Pressure Sensor (1) Vapour pressure (13) (7)Function 3 Distance Sensor (1) HART transmitter (12) (16)](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-170.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 115TABLE 6-10 Default function category, type, and sub-typeThe function type entity for Functions 3 through 7 can be changed from the default value <HART transmitter> to provide more information about the sensor, by setting the [User function type] entity and then resetting the FCI-HT board. The possible values are detailed in TABLE 6-11.TABLE 6-11 Generic HART user function typesFunctions 1 through 8 have fixed values for [PV Unit Type] and [Function Identification] entities, as detailed in TABLE 6-12.Function 4 Temperature Sensor (1) HART transmitter (12) (16)Function 5 Pressure Sensor (1) HART transmitter (12) (16)Function 6 Density Sensor (1) HART transmitter (12) (16)Function 7 Other Sensor (1) HART transmitter (12) (16)Function 8 HIMS Density Sensor (1) Product density (6) (8)Function Allocation User Function Type ValueFunction 3 Distance User function type product level 4User function type water level 9Function 4 Temperature User function type product temperature 8User function type vapour temperature 7Function 5 Pressure User function type product pressure 5User function type vapour pressure 13Function 6 Density User function type product density 6Function 7 Other User function type product level 4User function type water level 9User function type product temperature 8User function type vapour temperature 7User function type product pressure 5User function type vapour pressure 13User function type product density 6Function Allocation Function Category Function Type Function Sub-type](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-171.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 116 Service ManualTABLE 6-12 PV unit type and function identification6.8.3.7 SmartView DisplayAlthough the Primary Values (PV) of functions 1 through 8 are calculated in SI units, the SmartView display supports the following units for local calibration, commissioning etc. The displayed unit depends on the value of the [PV selected unit] entity.Function Allocation PV Unit Type Function IdentificationFunction 1 P1 Pressure UNIT_TYPE_PRESSURE <P1 Pressure>Function 2 P3 Pressure UNIT_TYPE_PRESSURE <P3 Pressure>Function 3 Distance UNIT_TYPE_LENGTH <Distance>Function 4 Temperature UNIT_TYPE_TEMPERATURE <Temperature>Function 5 Pressure UNIT_TYPE_PRESSURE <Pressure>Function 6 Density UNIT_TYPE_DENSITY <Density>Function 7 Other UNIT_TYPE_UNDEFINED <Other Units>Function 8 HIMS Density UNIT_TYPE_DENSITY <HIMS Density>PV Unit Type Display Unit Type Displayed UnitsPV Selected Unit RangePressure Pascal <pas> 1 max. 0.99 MPaKilo Pascal <kpas> 2 max. 9.9 MPaPounds per square inch (small)<psi s> 3 max. 99 psiPounds per square inch (large)<psi l> 4 max. 999 psiTemperature Degrees Celsius <°C> 1-Degrees Fahrenheit <°F> 2-Distance Meters <m> 1-Feet <ft> 2-Inches <in> 3-Fractions(feet, inches, 1/16th inch)<f.i.s.> 4-Density Kilograms per cubic meter<kg/m3> 1-Pounds per cubic foot<lb/f3> 2-Degrees API <a.p.i> 3-](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-172.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 117TABLE 6-13 SmartView displayed unit typesThe following PV types are supported on the SmartView display for P1 pressure and P3 pressure only. These are available changed by setting the [PV selected type] entity. This is detailed in TABLE 6-14.TABLE 6-14 P1 and P3 pressure displayed unit types6.8.4 Board CommissioningThe commissioning entity for each function is initially default to <False>.The commissioning entity for each function will only be <True> when the associated entities of each function have been set within normal operating range.The board-level commissioned entity default is also <False>. It will only be <True> when all the function-level commissioned entities are <True>.6.8.4.1 Function 1 Commissioning☛Set all Function 1 entities according to TABLE 6-15 requirements, to commission P1.Other Milli <m ...> 1-(none) <-> 2-Kilo <k ...> 3-Mega <M ...> 4-PV Unit Type Display Unit Type Displayed Type PV selected typeP1 Pressure Absolute <ABS> 1P3 Pressure Relative <REL> 2HIMS DensityP1 Pressure SensorDetected P1 Ambient Air Pressure and P1 Installed Commissioned<Enabled> N/A [P1 ambient air pressure] z<default>AND [P1 installed] = <enable><True>[P1 ambient air pressure] = <default>OR[P1 installed]=<disable><False>PV Unit Type Display Unit Type Displayed UnitsPV Selected Unit Range](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-173.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 118 Service ManualTABLE 6-15 Function 1 commissioning entities6.8.4.2 Function 2 Commissioning☛Set all Function 2 entities according to TABLE 6-16 requirements, to commission P3.TABLE 6-16 Function 2 commissioning entities6.8.4.3 Function 3 through 7 Commissioning☛Set all Function 3 through 7 entities according to TABLE 6-17requirements, to commission all generic HART sensors.<Disabled> Yes [P1 ambient air pressure] z<default>AND[P1 installed] = <enable><True>[P1 ambient air pressure] = <default>OR[P1 installed] = <disable><False>No N/A <True>HIMS DensityP3 Pressure SensorDetected P3 Installed P3 Ambient Air Pressure Commissioned<Enabled> Yes <Enable> [P3 ambient air pressure]z<default><True>[P3 ambient air pressure] =<default><False><Disable> N/A <False>No <Enable> N/A <False><Disable> <True><Disabled> Yes <Enable> [P3 ambient air pressure]z<default><True><Disable> [P3 ambient air pressure]z<default><False>N/A [P3 ambient air pressure] =<default><False>No N/A N/A <True>HIMS DensityP1 Pressure SensorDetected P1 Ambient Air Pressure and P1 Installed Commissioned](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-174.png)
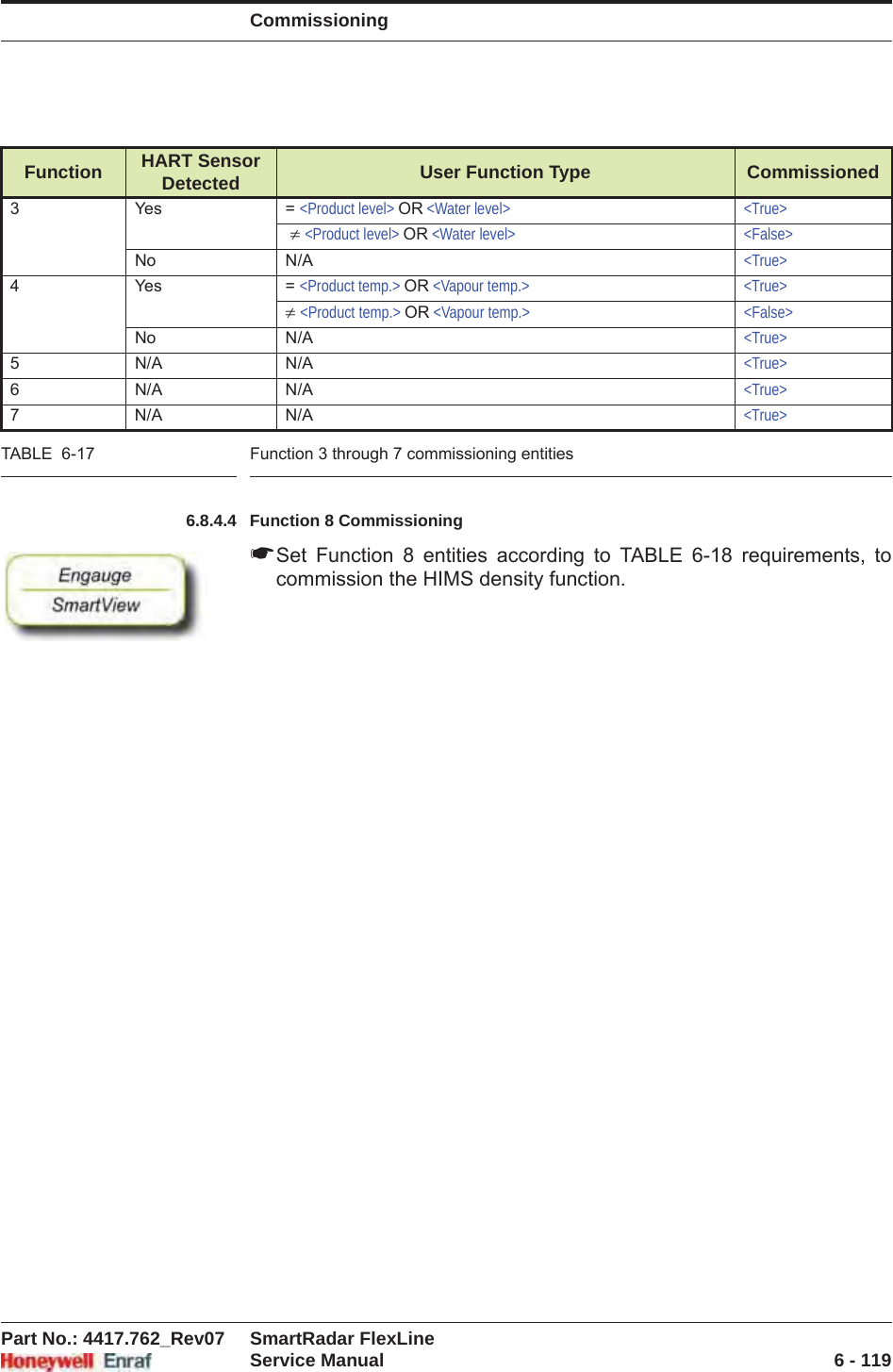
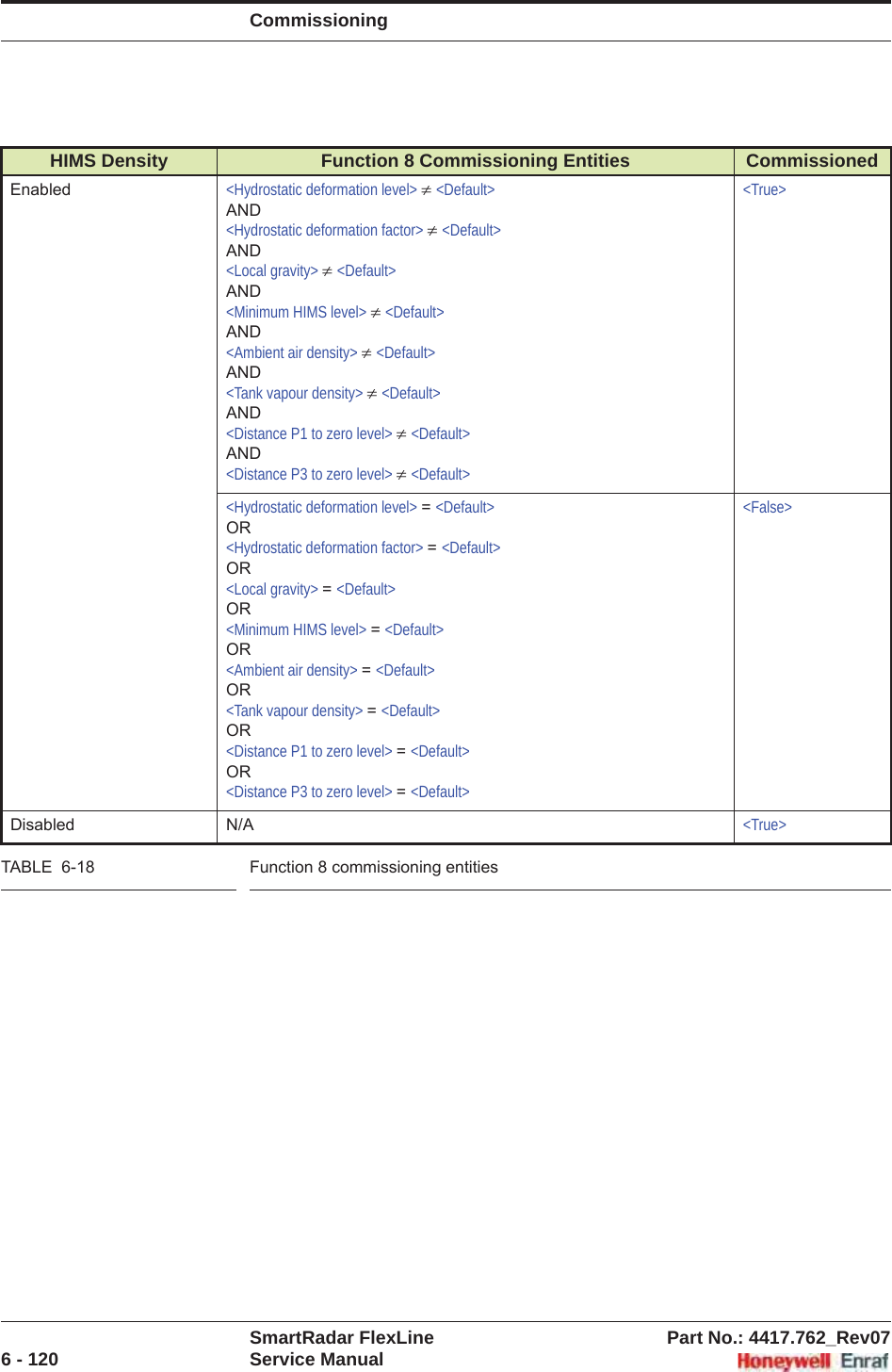
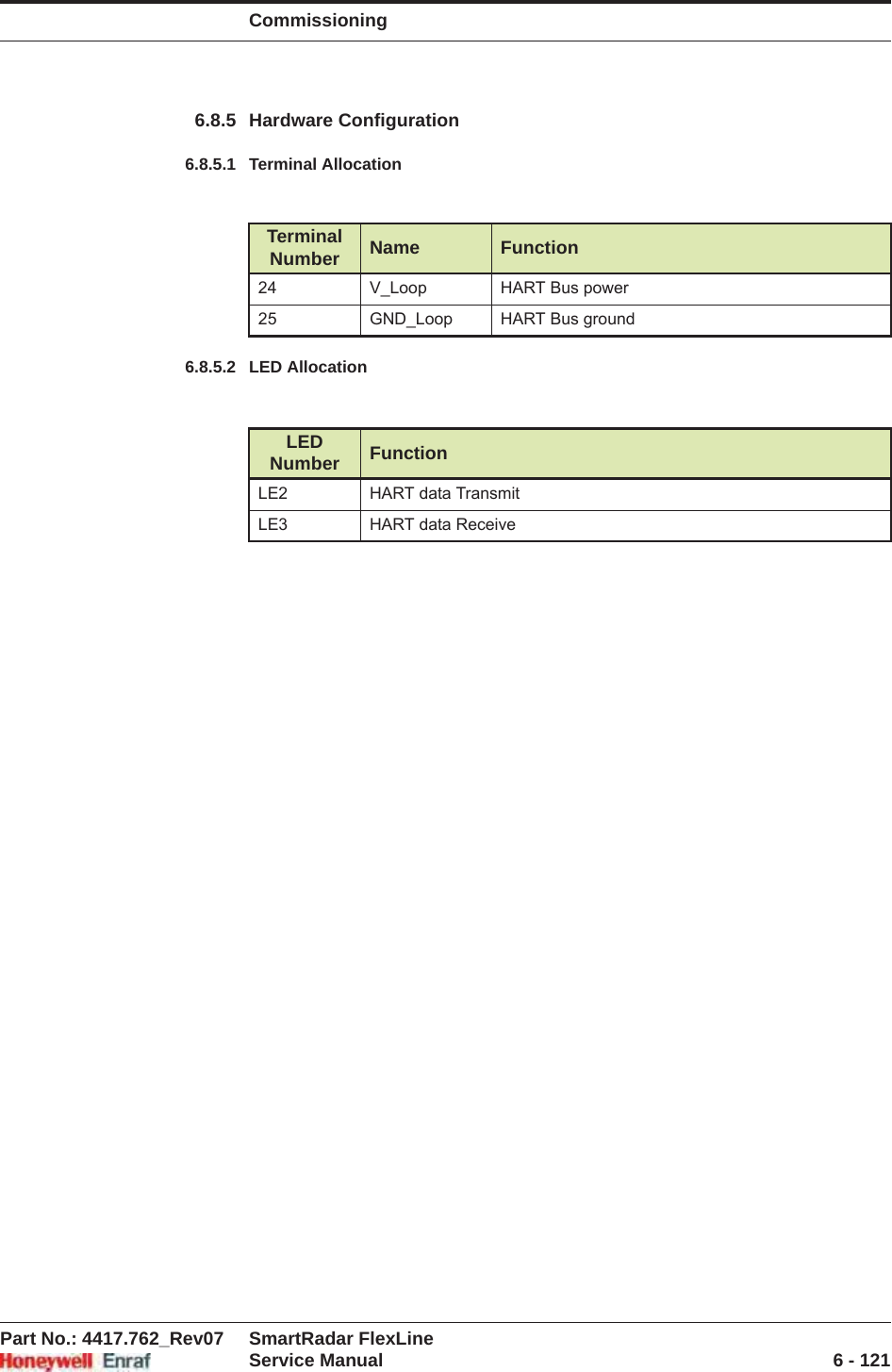
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 122 Service Manual6.9 HART Analog Outputs (HCI-HAO)6.9.1 IntroductionThe Host Communication Interface – HART Analog Output (HCI-HAO) is a HART® slave module which communicates with the associated HART master over the HART bus.ESF09-0005FIGURE 6-32 The HCI-HAO boardThe HART protocol is a bi-directional master-slave communication protocol, which is used to communicate between intelligent field instruments and host systems.The HCI-HAO board has a planar transformer for galvanic isolation from the HART bus. See FIGURE 6-32.LED LE1 is the board’s [Health] LED. LEDs LE2 and LE3 will be flashing to indicate activity on the HART bus. LE2 indicates data is being transmitted (Tx), LE3 indicates data is being received (Rx).LE1LE2LE3planartransformer](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-178.png)
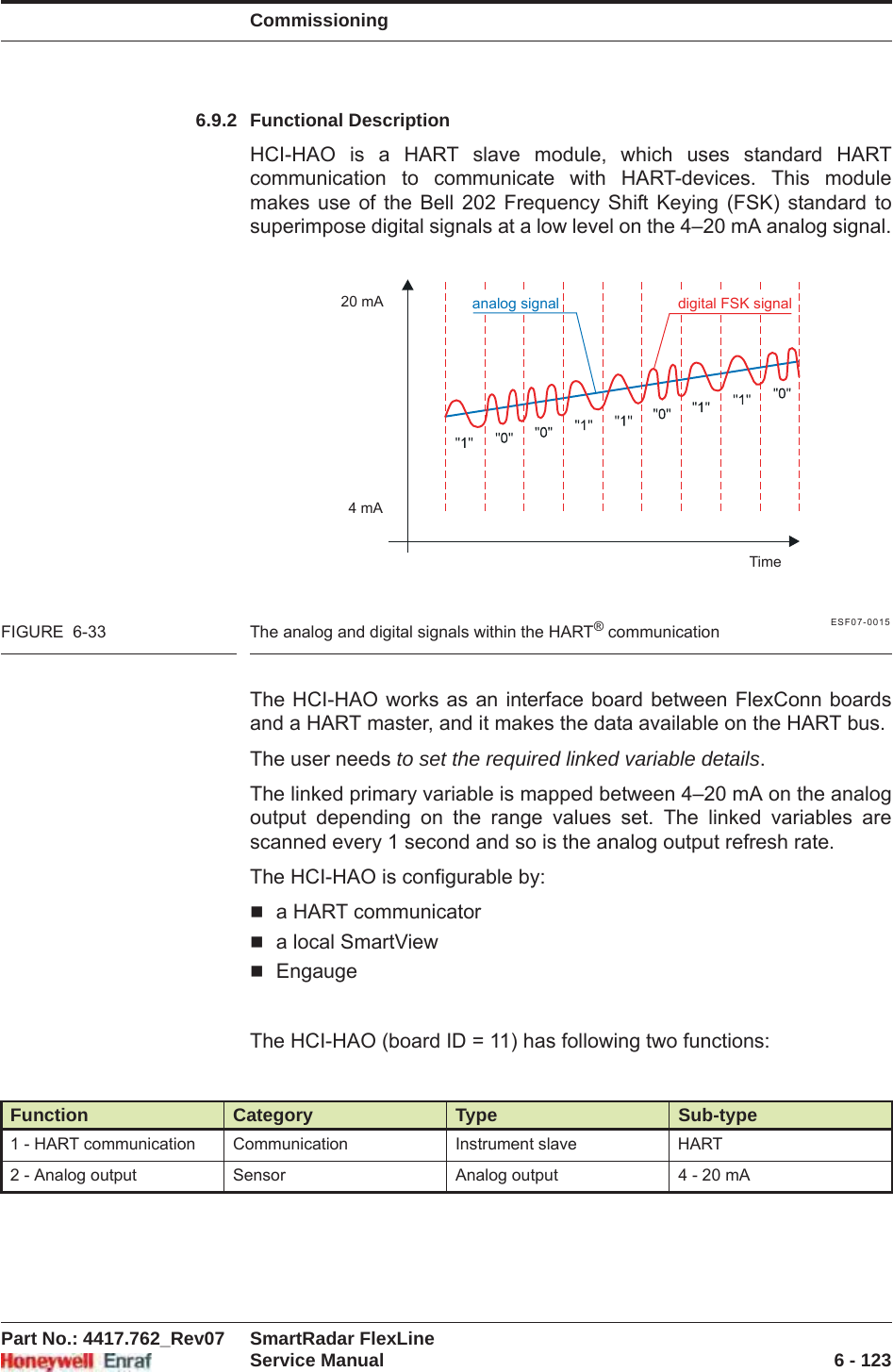
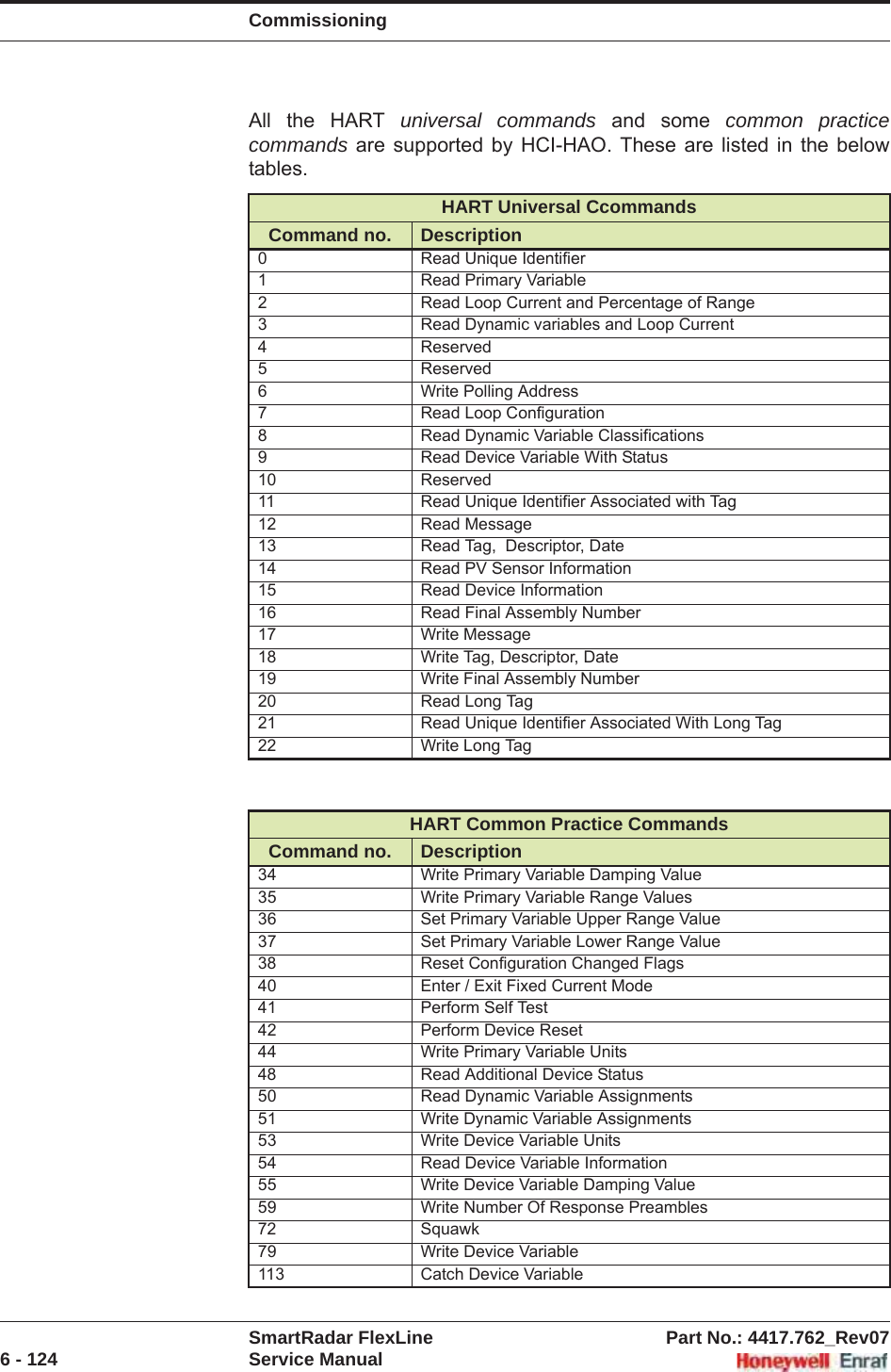
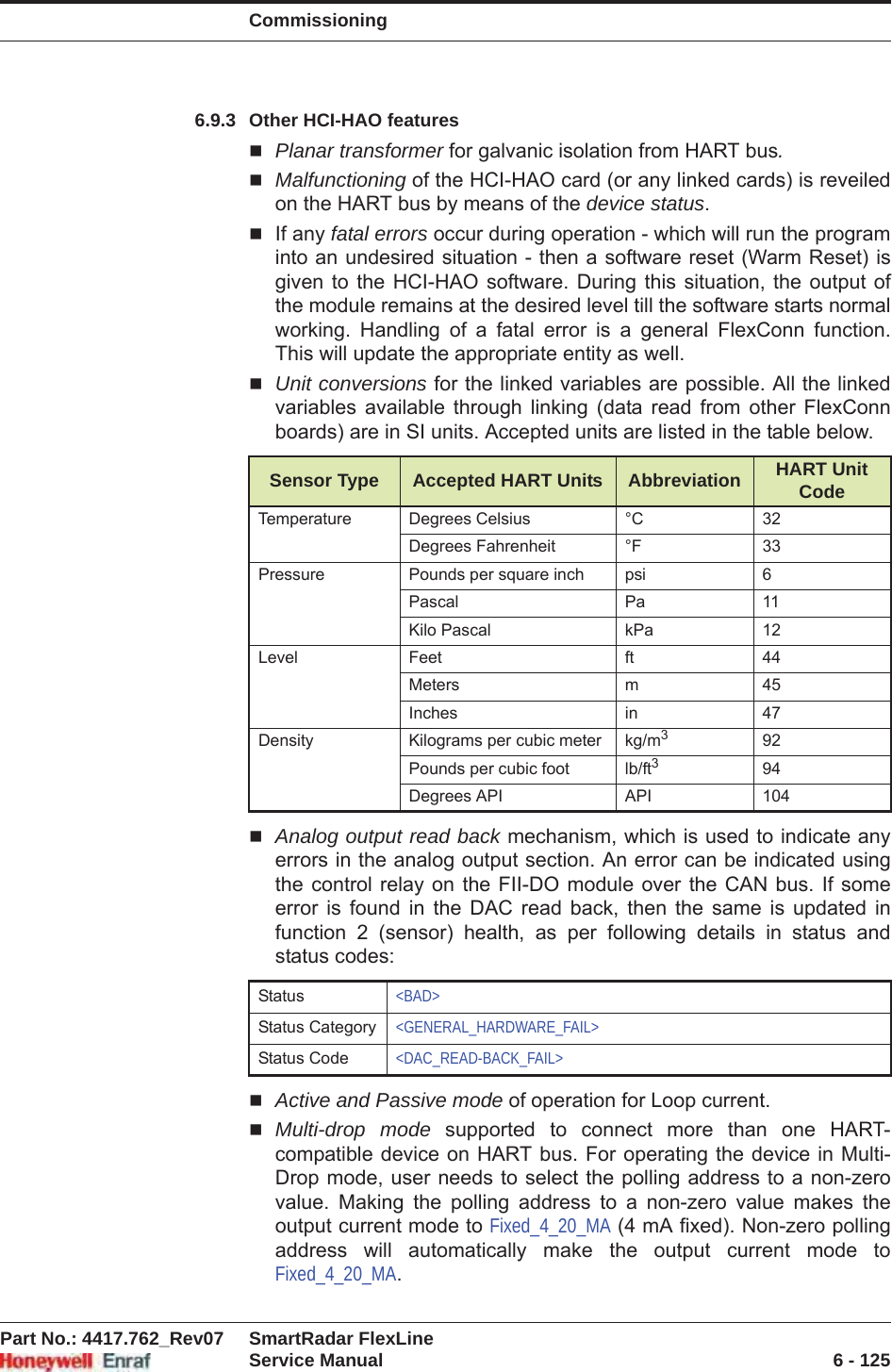
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 126 Service ManualAll the HART-compatible devices connected over the HART bus must have different polling addresses. Multi-drop mode is supported only in Passive mode of loop configuration. When the output current mode is set to Standard_4_20_MA, the polling address of the device must be made zero. When the device is not in multi-drop mode (STANDARD_4_20_MA mode selected) then the output current follows the changes in linked PV value.Scanning of each linked available PV, SV, TV and QV on the CAN-bus with frequency of 1 Hz. That means all the available linked variables are scanned every 1 second.The analog output is refreshed every 1 second, even if there is no change in the scanned variables. So, the watchdog for analog output is automatically implemented. If the output is not refreshed within 45 seconds then a watchdog to analog output is generated and the output is forced to 0 mA.During startup, the analog output of the HCI-HAO module is kept low (< 0.5 mA). This value will be there till initialization takes place. Once the normal operation starts the output will follow the linked PV depending upon the output mode setting.Manual overwrite mechanism. This is a standard FlexConn func-tionality. Separate configuration and command entities are defined for this. See 6.9.5 - Board Commissioning.6.9.4 Calibration of the HCI-HAOA calibration provision is given, which is used to accurately map the analog output between 4 -20 mA using the two range values entered for Primary Variable.Following table lists all entities required for calibration.NOTE: Commands used in the following calibration procedure can be executed either by using the CAN tool, the SmartView, or Engauge.Calibrate the analog output of the HCI-HAO as follows:☛Connect loop resistor at connector CN2☛Power up HCI-HAO boardEntity Data Type Type[Analog Output at 4 mA] Float non-volatile R/W[Analog Output at 18 mA] Float non-volatile R/W[Calibrate at 4 mA] Undefined command[Calibrate at 18 mA] Undefined command[Enter Calibration Mode] Undefined command[Exit Calibration Mode] Undefined command](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-182.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 127☛Give command [Enter Calibration Mode]☛Give command [Calibrate Analog Output at 4mA]☛Measure actual output current through the loop resistor, using a current meter☛Enter this value in the [Analog Output at 4mA] entity☛Give command [Calibrate Analog Output at 18mA]☛Measure actual output current through the loop resistor, using a current meter☛Enter this value in the [Analog Output at 18mA] entity☛Give command [Exit Calibration Mode], to exit the calibration modeThese calibration data are used to calculate the analog output current for the Primary Value (PV).Untill calibration has been carried out, the Health status of the PV and the analog output function will be:Status <BAD>Status Category <STATUS_CATEGORY_BAD_GENERAL_CALIBRATION_FAIL>Status Code <CALIBRATION_SET_POINTS_NOT_CALIBRATED>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-183.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 128 Service Manual6.9.5 Board Commissioning6.9.5.1 Basic Configurable Entities OverviewBasic configuration entities of the HCI-HAO board, which are configurable by using SmartView, are listed in the following table.Entity SmartView Display Data Type Type Default Function[PV Link board ID] PV linked Brd ID Unsigned int 8 bitsNon-Volatile <0> Board Specific[PV Link board instance] PV linked Brd IN Unsigned int 8 bitsNon-Volatile <0>[PV Link function instance] PV linked Brd FI Unsigned int 8 bitsNon-Volatile <0>[PV Link Board Sensor Value] PV link Brd SVAL Enumeration Non-Volatile <PV_LINK>[SV Link board ID] SV linked Brd ID Unsigned int 8 bitsNon-Volatile <0>[SV Link board instance] SV linked Brd IN Unsigned int 8 bitsNon-Volatile <0>[SV Link function instance] SV linked Brd FI Unsigned int 8 bitsNon-Volatile <0>[Polling Address] Polling Address Unsigned int 8 bitsNon-Volatile <0> Communication[HART PV unit code] PV Unit Code Enumeration Non-Volatile <UNKNOWN>[Upper Transducer Limit] Upper Tran Limit Float Non-Volatile <0>[Lower Transducer Limit] Lower Tran Limit Float Non-Volatile <0>[Transducer Serial Number] Transducer Sr No Unsigned int 32 bitsNon-Volatile <123>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-184.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 1296.9.5.2 Commissioning☛The following entities must be set by Engauge or SmartView for a correct functioning of the HCI-HAO module in an instrument.[PV Lower range value] Lw Range Value Float Non-Volatile <0> Sensor (Analog Output)[PV Upper range value] Up Range Value Float Non-Volatile <0>[Analog Output mode] HART Mode Enumeration<Fixed 4-20mA><Standard 4-20mA>Non-Volatile <Standard 4-20mA>[Burnout Value] Burnout Value Float Non-Volatile <3.6>[Burnout Behavior] Burnout Behavior Enumeration<BAD><UNCERTAIN><BAD + UNCERTAIN>Non-Volatile <BAD>[Enter Calibration Mode] Enter Cal Mode Undefined Command[Cal Value at 4 mA] Cal Value at 4 mA Float Non-Volatile <0>[Cal Value at 18 mA] Cal Value at 18 mA Float Non-Volatile <0>[Calibrate at 4 mA] Calibrate at 4 mA Undefined Command[Calibrate at 18 mA] Calibrate at 18 mA Undefined Command[Exit Calibration Mode] Exit Cal Mode Undefined CommandName Explanation Default Value Function Part Function[PV Link board ID] Board ID of Other FlexConn to be linked as PV to HCI-HAO<0> Board Board Specific[PV Link board instance] Board Instance of the linked PV board<0>[PV Link function instance] Function Instance of the linked PV board<0>[PV Link Sensor Value]* Primary or secondary variable of linked card can be assigned to this<PV_LINK>Entity SmartView Display Data Type Type Default Function](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-185.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 130 Service Manual*) Default values for entities marked in GREEN in the above table could be considered as proper values for making the health for respective Function or Board <GOOD>. However, the user is free to choose these values as per the requirement along with the rest of the entities.All the entities in the above table would be initialized to their default values after [init novram] command is given. All the entities should have their proper values so as to make the respective Function and Board health to <GOOD> status.The [Analog Output at 4 mA] and [Analog Output at 18 mA] fields should be entered after giving proper calibration commands (for more details, see 6.9.4).[HART PV unit code] Unit code for linked PV <UNIT_CODE_UNKNOWN> Function 1 Communication(HART communication)[HART Upper Transducer Limit]Upper transducer limit for connected sensor of linked PV board<0>[HART Lower Transducer Limit]Lower transducer limit for connected sensor of linked PV board<0>[Polling Address] Polling address of the device, which is used for poll-based addressing<0>[Transducer Serial Number]Transducer serial number of connected sensor of linked PV board<123>[Upper Range Value] Upper range value for PV.This value is used to calculate the analog output current.<0> Function 2 Sensor(Analog Output)[Analog Output at 4mA] Calibration reading when [Calibrate at 4 mA] command is given<0>[Analog Output at 18 mA]Calibration reading when [Calibrate at 18 mA] command is given<0>[Lower Range Value] Lower range value for PV.This value is used to calculate the analog output current.<0>[Analog Burnout Value] Analog burnout value in case of malfunctioning device<3.6mA>Name Explanation Default Value Function Part Function](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-186.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 131☛The following entities can be set by Engauge or SmartView for a correct functioning of the HCI-HAO module in an instrument.If one needs to assign SV, TV, QV to HCI-HAO then the corresponding unit codes also needs to be set properly so that the value read from other FlexConn board will be proper.Name Explanation Default Value Function Part Function[SV Link board ID] Board ID of Other FlexConn which is linked as SV to HCI-HAO<0> Board Board Specific[SV Link board instance] Board Instance of the linked SV board<0>[SV Link function instance] Function Instance of the linked SV board<0>[TV Link board ID] Board ID of Other FlexConn which is linked as TV to HCI-HAO<0>[TV Link board instance] Board Instance of the linked TV board<0>[TV Link function instance]Function Instance of the linked TV board<0>[QV Link board ID] Board ID of Other FlexConn which is linked as QV to HCI-HAO<0>[QV Link board instance]Board Instance of the linked QV board<0>[QV Link function instance]Function Instance of the linked QV board<0>[Linked Primary Value] PV / SV value of linked PV board in the set unit code<0>[Linked Secondary Value]PV value of linked SV board in the set unit code<0>[Linked Tertiary Value] PV value of linked TV board in the set unit code<0>[Linked Quarternary Value]PV value of linked QV board in the set unit code<0>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-187.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 132 Service Manual[HART SV unit code] Unit code for linked SV <UNIT_CODE_UNKNOWN> Function 1 Communication(HART communication)[HART TV unit code] Unit code for linked TV <UNIT_CODE_UNKNOWN>[HART QV unit code] Unit code for linked QV <UNIT_CODE_UNKNOWN>[Configuration changed Counter]Increments every time the configuration is changed<0>[Device ID] Same as Enraf Serial number. This is a unique number to every board.[Device Type] Device type registered with the HART Communication Foundation<127>[Manufacturer ID Number] Manufacturer ID registered with the HART Communication Foundation<148>[Number of Preambles] Number of preambles required for a request from the HART master<7>[Number of Response Preambles]Number of preambles in the HCI-HAO response stream<7>[Fixed Current Value] Fixed analog output current set by HART command 40<0> Function 2 Sensor(Analog Output)[Loop Current Mode] If HART mode selected is <Standard 4-20mA>, then it is enabled.If HART mode selected is <Fixed 4-20mA>, then it is disabled.<Enabled>[Percentage of Range] Percentage of current PV with respect to the limits set<0>Name Explanation Default Value Function Part Function](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-188.png)
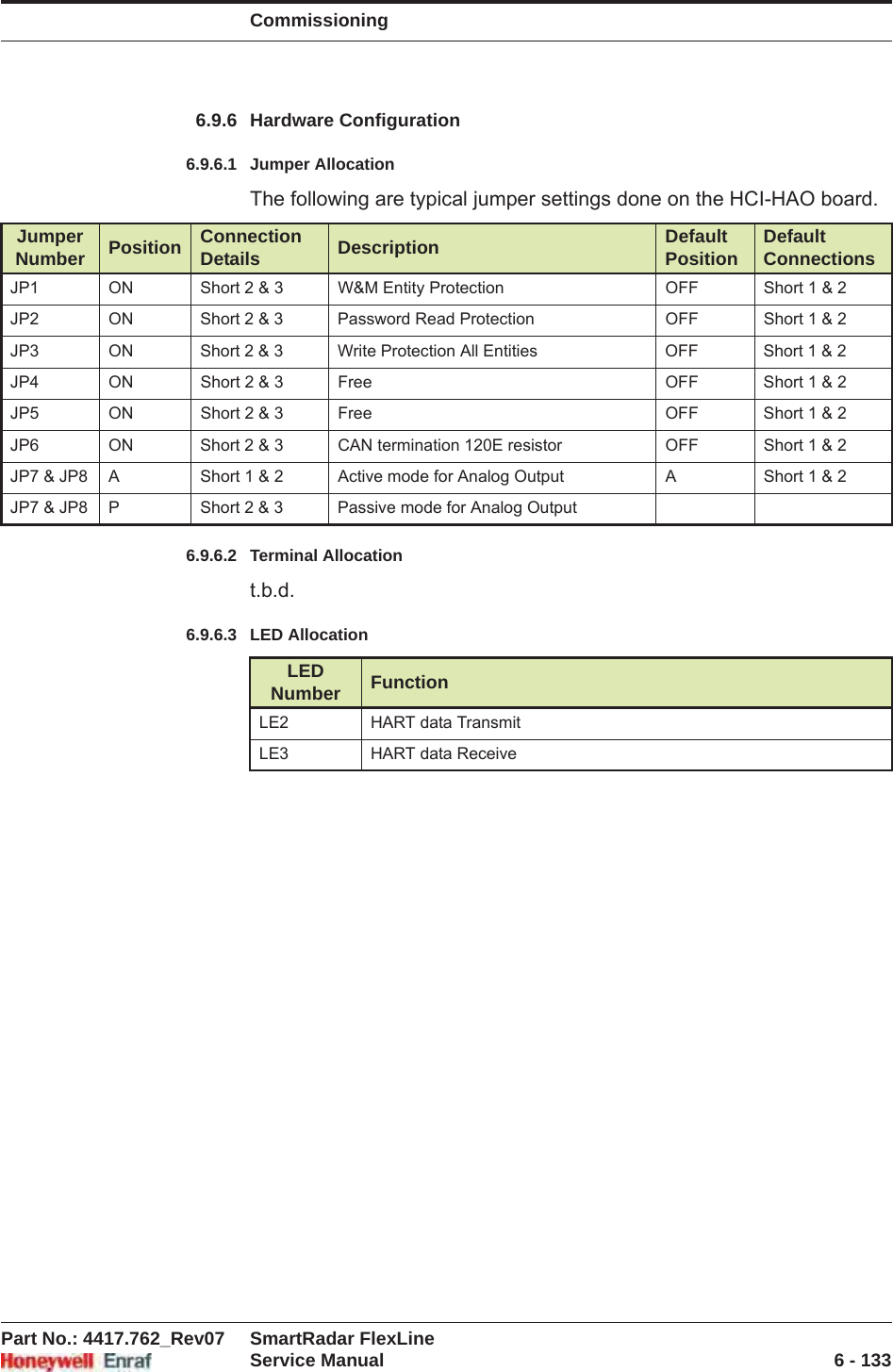
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 134 Service Manual6.10 Average Temperature & Water Level Measurement (FII-VT)6.10.1 IntroductionThe Field Interface Instrument - VITO1 (FII-VT) board is a VITO-data processor module, which calculates average product- and vapour temperatures, and optionally a water level.ESF07-0016FIGURE 6-34 The FII-VT board with its planar transformerBy using the HART® protocol (see also 6.8.1), the FII-VT module can be connected to one VITO-interface which in turn is connected to a probe for product temperature,vapour temperature,water level, or a combination of these.The FII-VT board has a planar transformer for galvanic isolation from the HART bus. See FIGURE 6-34.LED LE1 is the board’s [Health] LED. LEDs LE2 and LE3 will be flashing to indicate activity on the HART bus. LE2 indicates data is being transmitted (Tx), LE3 indicates data is being received (Rx).1. Versatile In-Tank ObserverLE1LE2LE3planartransformer](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-190.png)
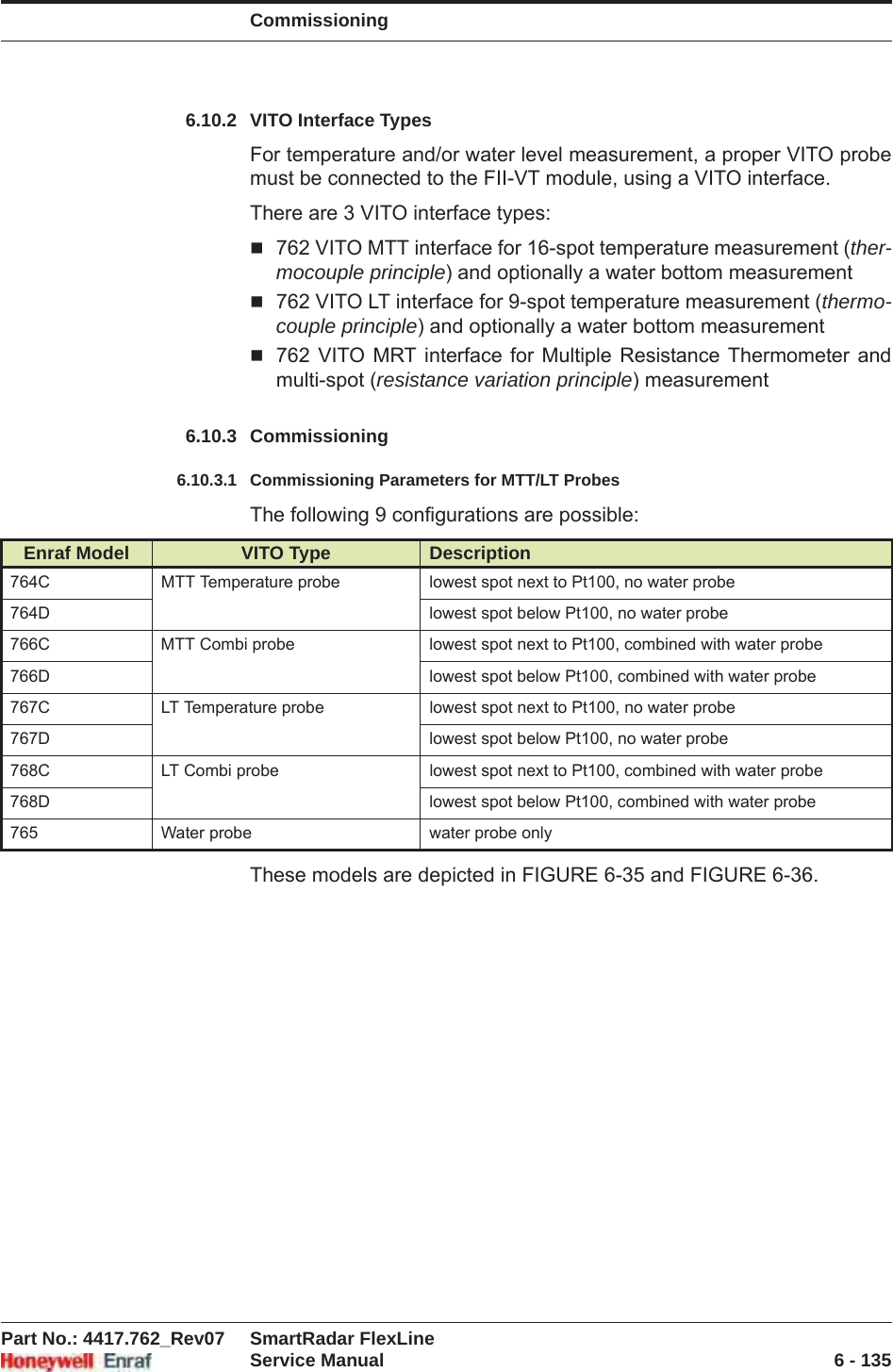
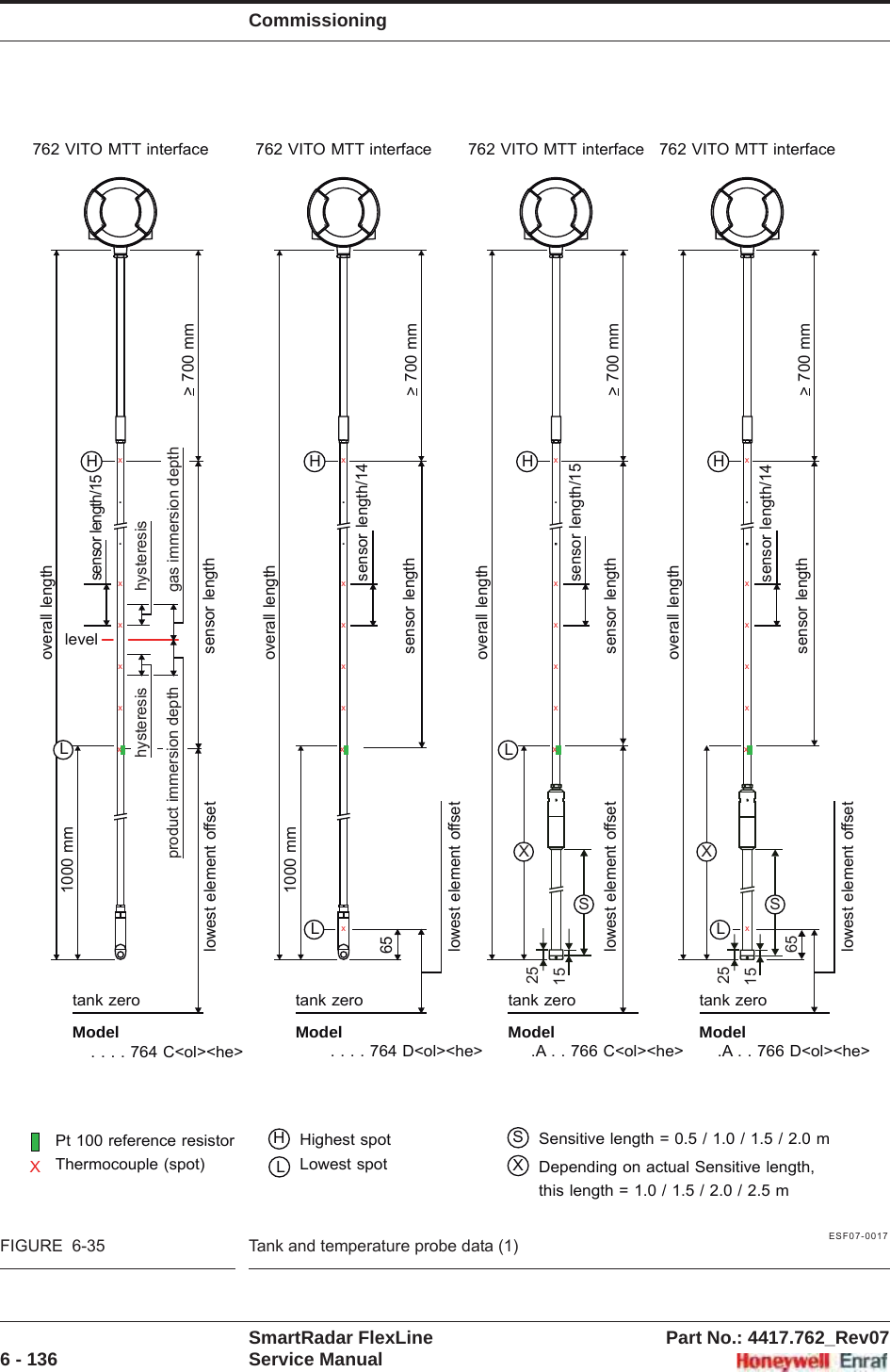
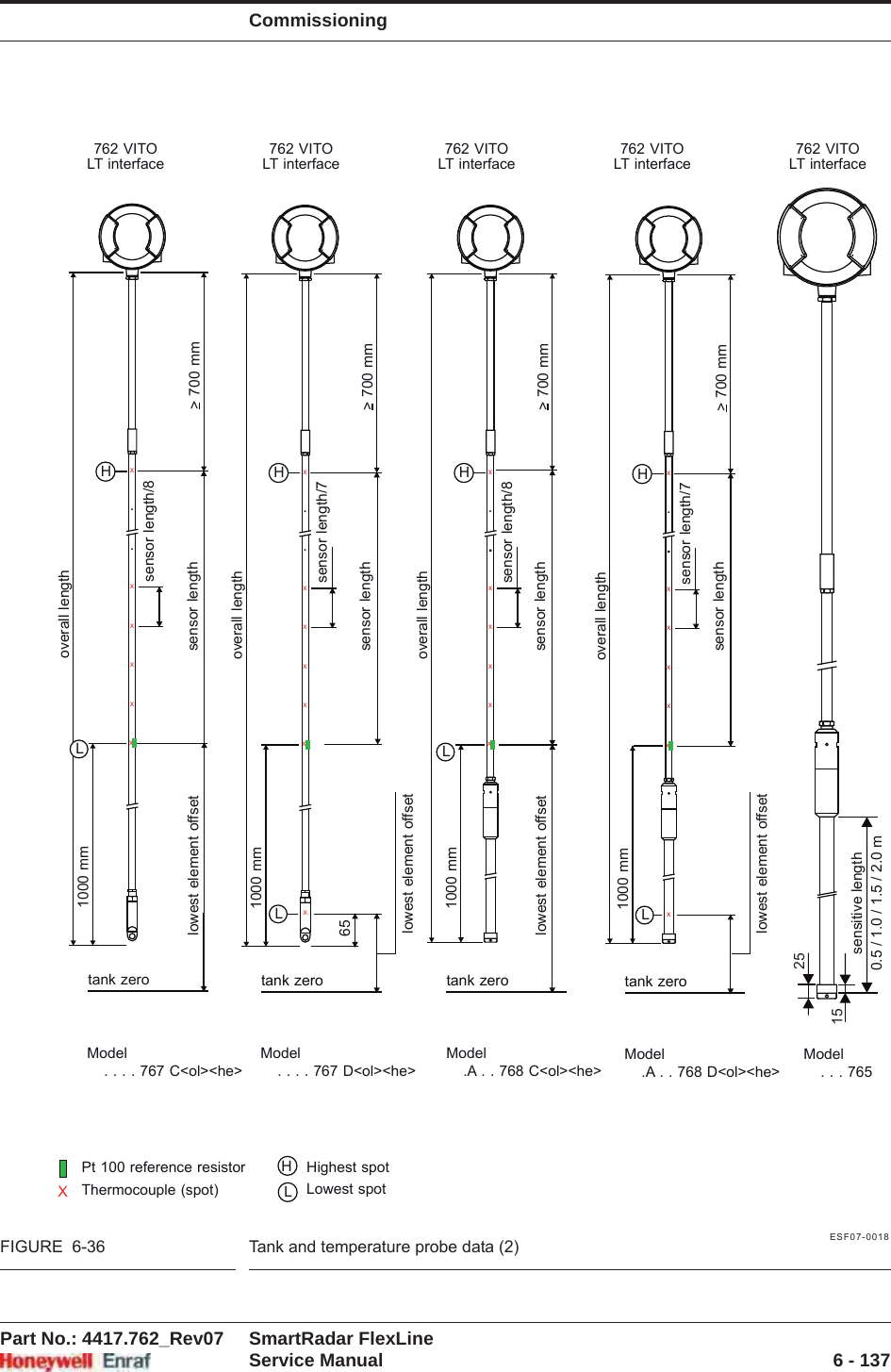
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 138 Service Manual6.10.3.1.1 Product Temperature☛The following entities must be set by Engauge or SmartView for a correct functioning of the FII-VT module in an instrument.NOTE: Using Engauge, following entities are set within the Engauge Product temperature tab.The following entities can be set by Engauge or SmartView for a correct functioning of the FII-VT module in an instrument.☛Check each entity for its correctness.Name Explanation Value Range Default[Lowest element offset] The distance from tank zero till the lowest element position in the temperature probefloating point number:<-x.x .. +x.x><80.0>[Sensor length] The distance from the Pt100 position till the highest element positionfloating point number: <-x.x .. +x.x><80.0>Name Explanation Value Range Default[Product immersion depth] The minimum required distance of the product level above an element before it is taken into account in the average product temperature calculationfloating point number:<-x.x .. +x.x><0.5>[Hysteresis] The distance for a hysteresis mechanism around the switching point of the elements that are taken into account in the calculationfloating point number:<-x.x .. +x.x><0.1>[High High alarm][High Alarm][Low Alarm][Low Low alarm]4 thresholds for activating a related alarm status in the Primary Valuefloating point number:<-x.x .. +x.x><+1.0E22>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-194.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 1396.10.3.1.2 Vapour TemperatureNOTE: Using Engauge, following entities are set within the Engauge Vapour temperature tab.Some Vapour temperature settings are shared with Product temperature settings.The following entities can be set by Engauge or SmartView for a correct functioning of the FII-VT module in an instrument.☛Check each entity for its correctness.[Alarm test enable] Enables (if activated, see next listed entity) the simulation of one of the 4 alarms for a minute, by simulating the actual measured Primary Value is below or above the alarm threshold.<enable><disable><disable>[Alarm test] Activates and selects at the same time the Alarm test (if enabled with the [Alarm test enable] listed before, and the 4 alarm thresholds are properly set).[No Alarm][High High alarm][High Alarm][Low Alarm][Low Low alarm]<No Alarm>[Element wiring] Used for excluding an element from the average product temperature calculation.16 charactersA non-zero (z 0) character at position x results in element x being excluded from calculation.<0000000000000000>[Function identification] The current module’s function name. This function is visible on the SmartView display.13 characters <Product temp.>Name Explanation Value Range Default[Gas immersion depth] The minimum required distance below an element before it is taken into account in the average vapour temperature calculationfloating point number:<-x.x .. +x.x><0.5>[High High alarm][High Alarm][Low Alarm][Low Low alarm]4 thresholds for activating a related alarm status in the Primary Valuefloating point number:<-x.x .. +x.x><+1.0E22>Name Explanation Value Range Default](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-195.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 140 Service Manual6.10.3.1.3 Water Level (for 766/768 Combi probes and 765 Water probe only)☛The following entities must be set by Engauge or SmartView for a correct functioning of the FII-VT module in an instrument.[Alarm test enable] Enables (if activated, see next listed entity) the simulation of one of the 4 alarms for a minute, by simulating the actual measured Primary Value is below or above the alarm threshold.<enable><disable><disable>[Alarm test] Activates and selects at the same time the Alarm test (if enabled with the [Alarm test enable] listed before, and the 4 alarm thresholds are properly set).[No Alarm][High High alarm][High Alarm][Low Alarm][Low Low alarm]<No Alarm>[Function identification] The current module’s function name. This function is visible on the SmartView display.13 characters <Vapour temp.>Name Explanation Value Range Default[Maximum water capacity] The maximum capacity when the probe is fully submerged in water (in pF)floating point number:<-x.x .. +x.x><20000>[Minimum water capacity] The minimum capacity when the probe is not submerged in water (in pF)floating point number:<-x.x .. +x.x><20000>[Water probe bottom position] The offset to the water probe zero point in relation with the tank zero pointfloating point number:<-x.x .. +x.x><80>[Upper reference level] The distance from tank zero point to upper reference point; is used for water ullage calculationfloating point number:<-x.x .. +x.x><80>Name Explanation Value Range Default](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-196.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 141☛The following entities can be set by Engauge or SmartView for a correct functioning of the FII-VT module in an instrument.Name Explanation Value Range Default[Water probe length] The length of a water probe floating point number:<-x.x .. +x.x><0.5>[High High alarm][High Alarm][Low Alarm][Low Low alarm]4 thresholds for activating a related alarm status in the Primary Valuefloating point numbers:<-x.x .. +x.x><+1.0E22>[Alarm test enable] Enables (if activated, see next listed entity) the simulation of one of the 4 alarms for a minute, by simulating the actual measured Primary Value is below or above the alarm threshold.<enable><disable><disable>[Alarm test] Activates and selects at the same time the Alarm test (if enabled with the [Alarm test enable] listed before, and the 4 alarm thresholds are properly set).[No Alarm][High High alarm][High Alarm][Low Alarm][Low Low alarm]<No Alarm>[Function identification] The current module’s function name. This function is visible on the SmartView display.13 characters <Water level>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-197.png)
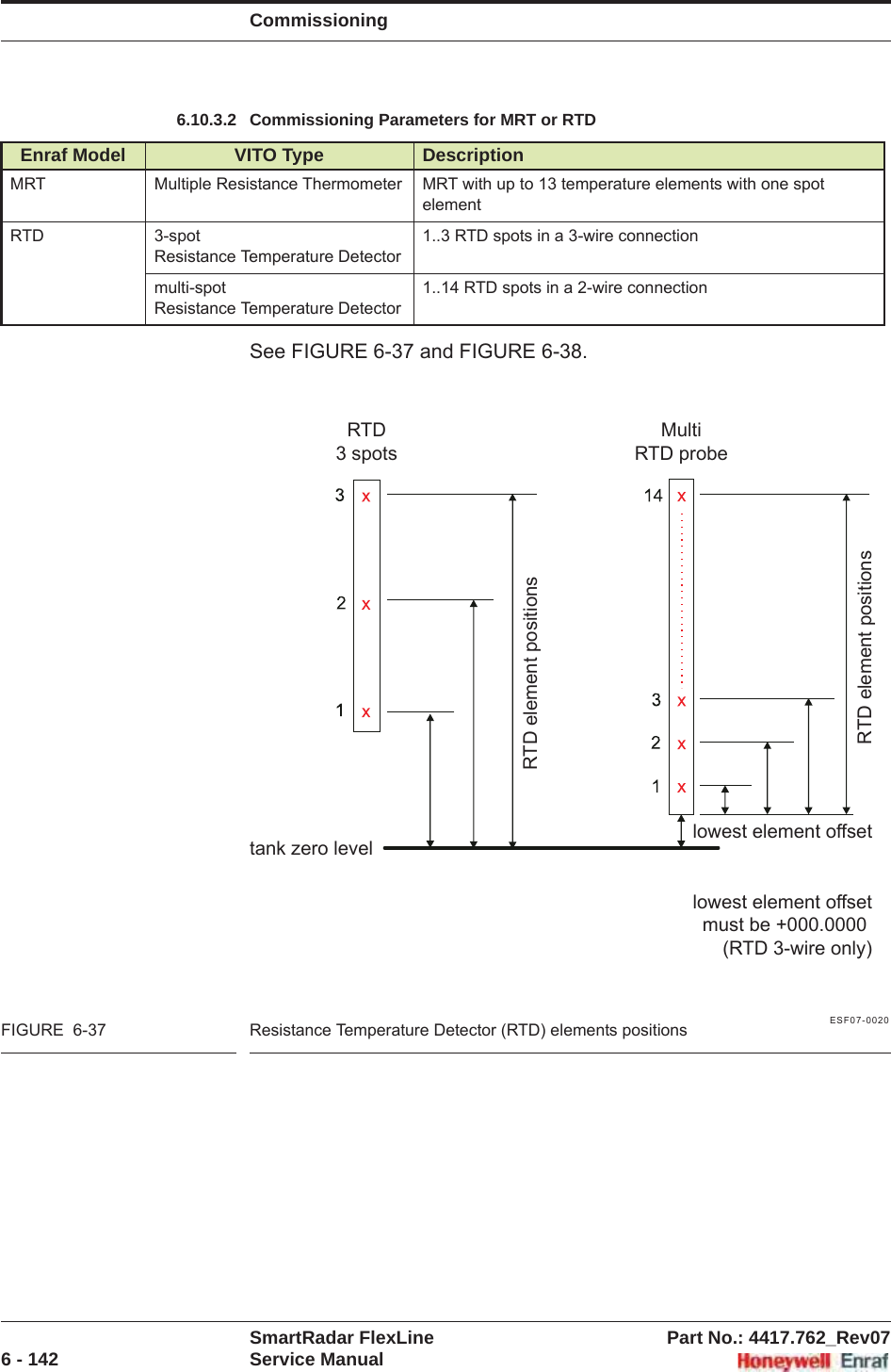
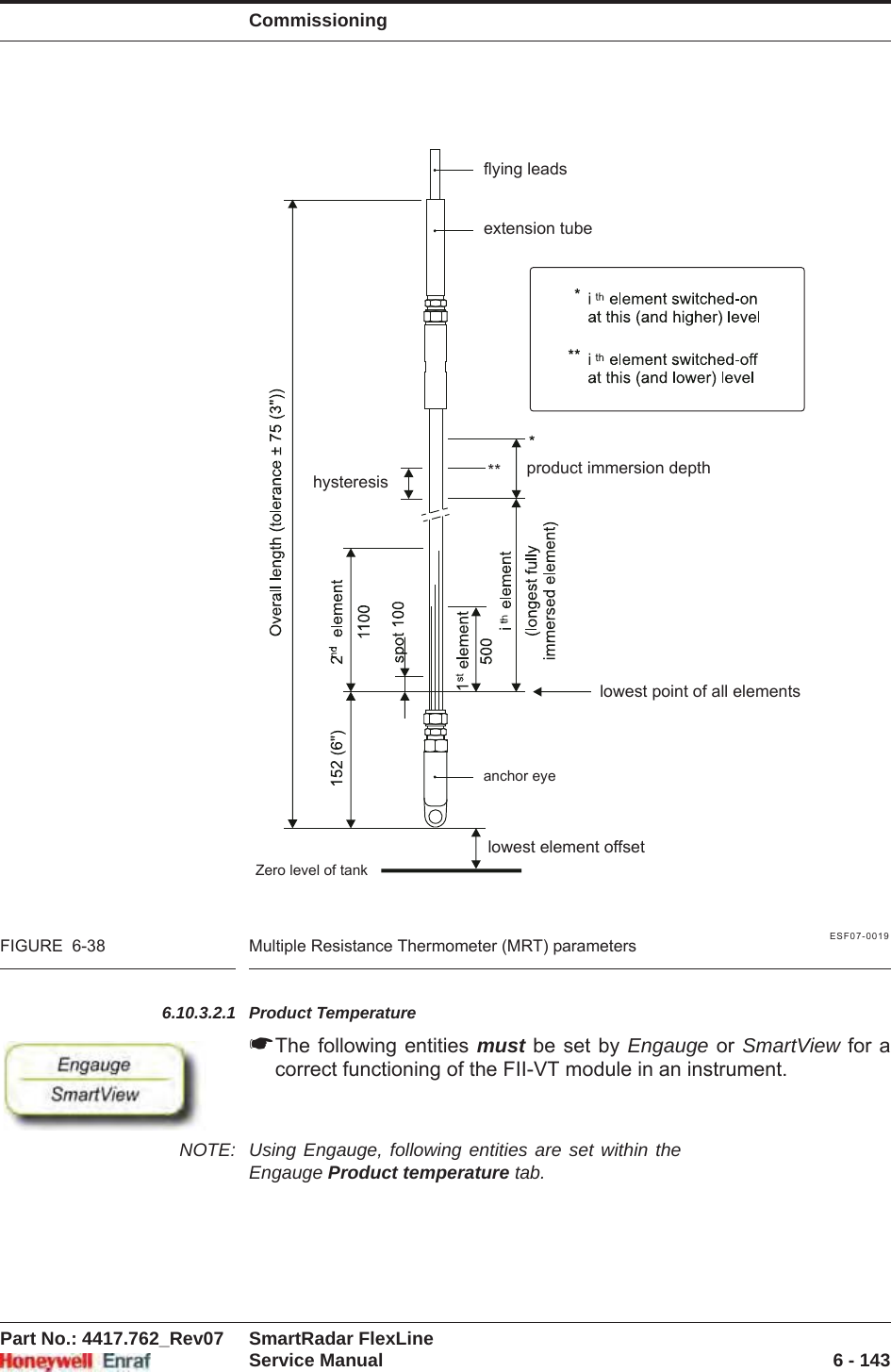
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 144 Service ManualRTD 3 spots (see FIGURE 6-37 left side)Multi RTD probe (see FIGURE 6-37 right side)Name Explanation Value Range Default[Element type] The supported element type is: SPL3 characters<SPL><--->[Number of elements] The number of elements a RTD probe has<1 .. 3> <0>[Lowest element offset] The distance from tank zero till the lowest position of the multi-RTD probe.So not used for the 3-wire version and it must be 0.floating point number:<-x.x .. +x.x>MUST BE <0.0><80.0>[RTD element positions] The positions of the RTDs from tank zero level3 floating point numbers:<-x.x .. +x.x>Note: Only actually usedelements to be entered.<0,0,0>Name Explanation Value Range Default[Element type] The supported element type is : SPL3 characters<SPL><--->[Number of elements] The number of elements a RTD probe has<1 .. 14> <0>[Lowest element offset] The distance from tank zero till the lowest position of the multi-RTD probefloating point number:<-x.x .. +x.x><80.0>[RTD element positions] The positions of the RTDs from the lowest position of the probe.So not tank zero level!14 floating point numbers:<-x.x .. +x.x>Note: Only actually usedelements to be entered.<0,0,0,0,0,0,0,0,0,0,0,0,0,0>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-200.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 145MRT (see FIGURE 6-38)TABLE 6-19 Element type definitionsName Explanation Value Range Default[Element type] See Table TABLE 6-19 below.3 characters<RCB><RCN><RCS><QCB><QCN><QCS><--->[Number of elements] The number of elements (resistors) an MRT probe has<1 .. 14> <0>[Lowest element offset] The distance from tank zero till the lowest position of the MRT probefloating point number:<-x.x .. +x.x><80.0>[MRT element length] if MRT length table = <T>The lengths of the MRTs including anchor eye14 floating point numbers:<-x.x .. +x.x><0,0,0,0,0,0,0,0,0,0,0,0,0,0>[MRT length table] Specifies whether a fixed range of MRT resistors is used (= <F>) or user-configured lengths (= <T>).Fixed lengths are:0.25 / 0.65 / 1.25 / 1.95 /2.85 / 4.15 / 5.65 / 7.35 /9.25 / 11.65 / 14.65 /18.45 / 22.95 / 29.651 character<F><T><F>R.. = an MRT without spot elementQ.. = an MRT with spot element.CB Rth = 90.2935 + T x 0.38826 (- 100 through + 280 °C).CN Rth = 90.4778 + T x 0.38090 (- 100 through + 280 °C).CS Rth = 90.5000 + T x 0.38730 (- 100 through + 280 °C)](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-201.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 146 Service ManualThe following entities can be set by Engauge or SmartView for a correct functioning of the FII-VT module in an instrument.☛Check each entity for its correctness.Name Explanation Value Range Default[Product immersion depth] The minimum required product level distance above an element before this element is taken into account in the average product temperature calculationfloating point number:<-x.x .. +x.x><0.5>[Hysteresis] This is a hysteresis mechanism distance around the switching points of the elements that are taken into account in the calculation.floating point number:<-x.x .. +x.x><0.1>[High High alarm][High Alarm][Low Alarm][Low Low alarm]4 thresholds for activating a related alarm status in the Primary Valuefloating point numbers:<-x.x .. +x.x><1.0E22>[Alarm test enable] Enables (if activated, see next listed entity) the simulation of one of the 4 alarms for a minute, by simulating the actual measured Primary Value is below or above the alarm threshold.<enable><disable><disable>[Alarm test] Activates and selects at the same time the Alarm test (if enabled with the [Alarm test enable] listed before, and the 4 alarm thresholds are properly set).[No Alarm][High High alarm][High Alarm][Low Alarm][Low Low alarm]<No Alarm>[Function identification] The current module’s function name. This function is visible on the SmartView display.13 characters <Product temp.>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-202.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 1476.10.3.2.2 Vapour TemperatureNOTE: Using Engauge, following entities are set within the Engauge Vapour temperature tab.Some Vapour temperature settings are shared with Product temperature settings.The following entities can be set by Engauge or SmartView for a correct functioning of the FII-VT module in an instrument.☛Check each entity for its correctness.Name Explanation Value Range Default[Gas immersion depth] The minimum required distance below an element before it is taken into account in the average vapour temperature calculationfloating point number:<-x.x .. +x.x><0.5>[High High alarm][High Alarm][Low Alarm][Low Low alarm]4 thresholds for activating a related alarm status in the Primary Valuefloating point numbers:<-x.x .. +x.x><+1.0E22>[Alarm test enable] Enables (if activated, see next listed entity) the simulation of one of the 4 alarms for a minute, by simulating the actual measured Primary Value is below or above the alarm threshold.<enable><disable><disable>[Alarm test] Activates and selects at the same time the Alarm test (if enabled with the [Alarm test enable] listed before, and the 4 alarm thresholds are properly set).[No Alarm][High High alarm][High Alarm][Low Alarm][Low Low alarm]<No Alarm>[Function identification] The current module’s function name. This function is visible on the SmartView display.13 characters <Vapour temp.>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-203.png)
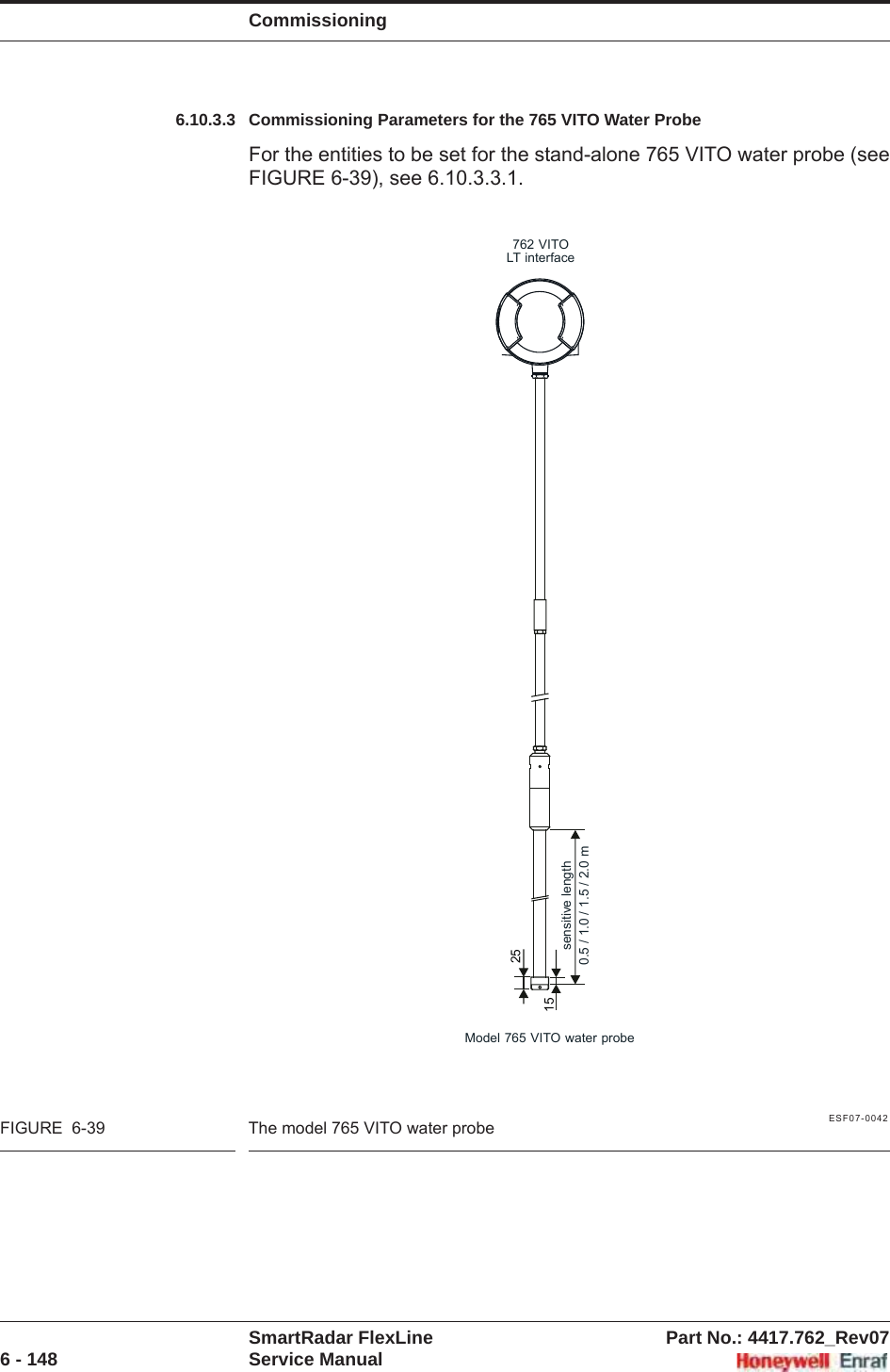
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 1496.10.3.3.1 Water Level☛The following entities must be set by Engauge or SmartView for a correct functioning of the FII-VT module in an instrument.☛The following entities can be set by Engauge or SmartView for a correct functioning of the FII-VT module in an instrument.Name Explanation Value Range Default[Maximum water capacity] The maximum capacity when the probe is fully submerged in water (in pF)floating point number:<-x.x .. +x.x><20000>[Minimum water capacity] The minimum capacity when the probe is not submerged in water (in pF)floating point number:<-x.x .. +x.x><20000>[Water probe bottom position] The offset to the water probe zero point in relation with the tank zero pointfloating point number:<-x.x .. +x.x><80>[Upper reference level] The distance from tank zero point to upper reference point; is used for water ullage calculationfloating point number:<-x.x .. +x.x><80>Name Explanation Value Range Default[Water probe length] The length of the 765 VITO water probefloating point number:<-x.x .. +x.x><0.5>[High High alarm][High Alarm][Low Alarm][Low Low alarm]4 thresholds for activating a related alarm status in the Primary Valuefloating point numbers:<-x.x .. +x.x><+1.0E22>[Alarm test enable] Enables (if activated, see next listed entity) the simulation of one of the 4 alarms for a minute, by simulating the actual measured Primary Value is below or above the alarm threshold.<enable><disable><disable>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-205.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 150 Service Manual6.10.4 Commissioning Check☛After having checked/set all before listed entities, make surethe [Board Commissioned], the [Product temperature Commissioned], the [Vapour temperature Commissioned], and - if applicable - the [Water level Commissioned] entities are <True>;the [Board Health], the [Product temperature Health], the [Vapour temperature Health], and - if applicable - the [Water level Health] entities are <GOOD>.[Alarm test] Activates and selects at the same time the Alarm test (if enabled with the [Alarm test enable] listed before, and the 4 alarm thresholds are properly set).[No Alarm][High High alarm][High Alarm][Low Alarm][Low Low alarm]<No Alarm>[Function identification] The current module’s function name. This function is visible on the SmartView display.13 characters <Water level>Name Explanation Value Range Default](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-206.png)
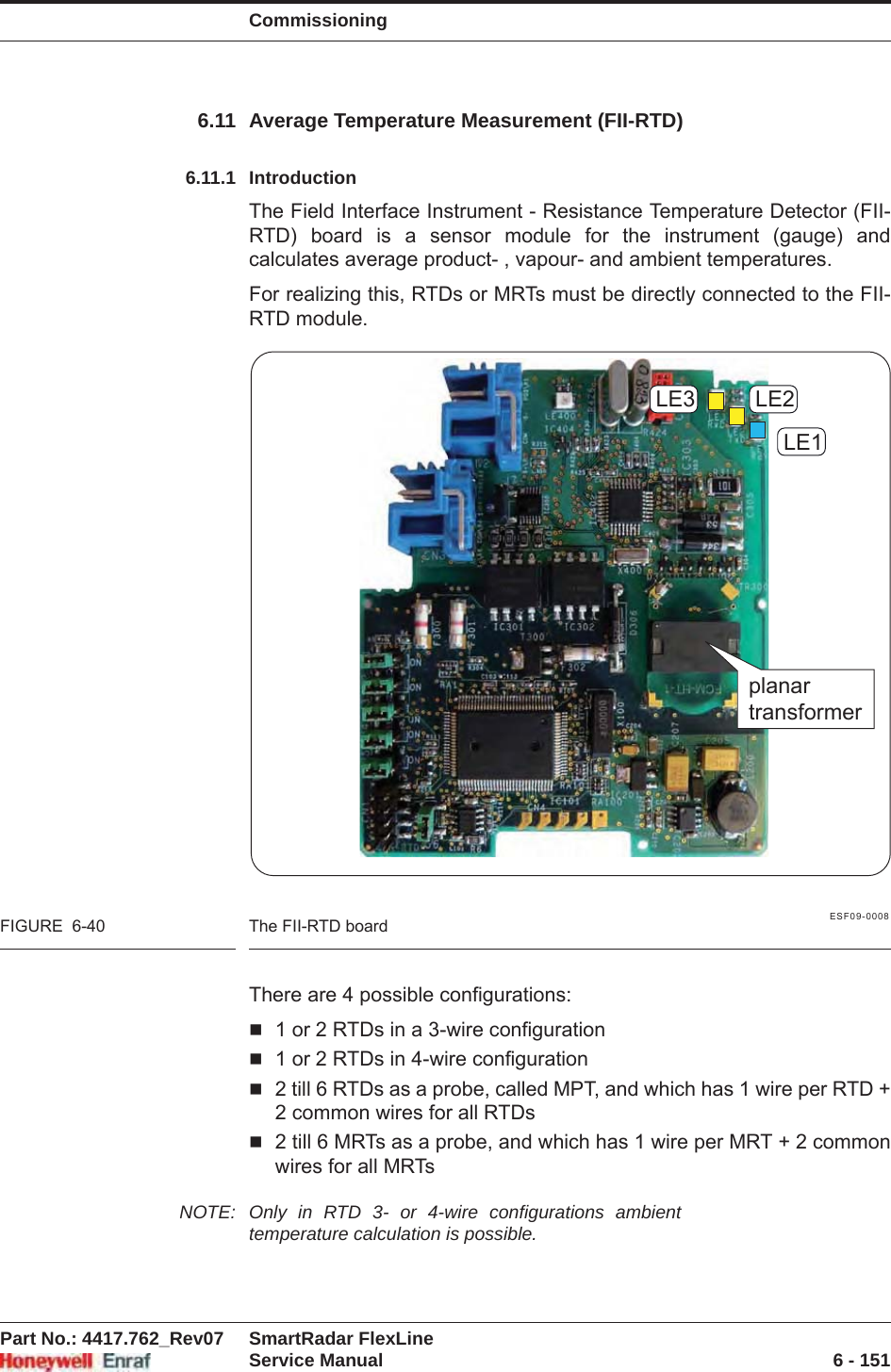
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 152 Service Manual6.11.2 Some Important SettingsThe FII-RTD can be tailored to the need of the customer by a lot of settings. See 6.11.4 - Commissioning.Some important settings of the FII-RTD are listed below.6.11.3 Some Important FeaturesTemperature calculations can be:•Standard (just simple averaging the spot temperatures).•Enhanced (averaging the spot temperatures and taking into account the contribution of each spot in respect to its immersion).•Custom (as standard but then giving it a weighing factor).Atemperature-range check can be turned on. In this case, if spot elements are out of range, a fail state results (if not skipped), see FIGURE 6-41.Setting Remarks[Element type] Can consist of following types:• Pt100 large + small• Ni191• PtCu100• Cu100• Cu90 Enraf + Beacon + Weston/Solartron/Nulectrohms• Sangamo MRT• Sangamo spot[Measurement type] Can be:• RTD 3-wire• RTD 4-wire• MPT•MRT[RTD configuration] Can be:• RTD1 in tank• RTD1 + RTD2 in tank• RTD1 in tank + RTD2 ambient• RTD1 ambient[Gauge temperature scale] Can be:• IPTS-68• ITS-90[Lowest element offset] This is the distance from tank bottom till lowest element position[Number of elements] Can be 1..6[MPT sensor length] -](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-208.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 153ESF09-0006FIGURE 6-41 Temperature range check featureAmedian filter can be turn on or off, which eliminates spikes of each individual calculated spot tempearture.An averaging constant filter can be turned on or off, which takes a certain part of the previous calculated average temperature and a certain part of the new calculated temperature into account.Low element usage with following possible sub-settings can be applied:• No exclusion• Static exclusion• Dynamic exclusionThese settings are then to be refined further with:• Exclude zone• Smoothing level• Low element behaviourSee FIGURE 6-42 on next page.range check result = OKspot elementin fail*)spot elementin fail(3 retries)spot elementin fail(3 retries)spot elementin fail*)*) if [Element skipping] is enabled, “spot element in fail” can be skipped*) if [Element skipping] is enabled, “spot element in fail” can be skippedchecking range if [Temperature range check] is enabledpermanent check permanent checkuppershortcutrangelowertemperaturerangeuppertemperaturerangelowernot-connectedrange](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-209.png)
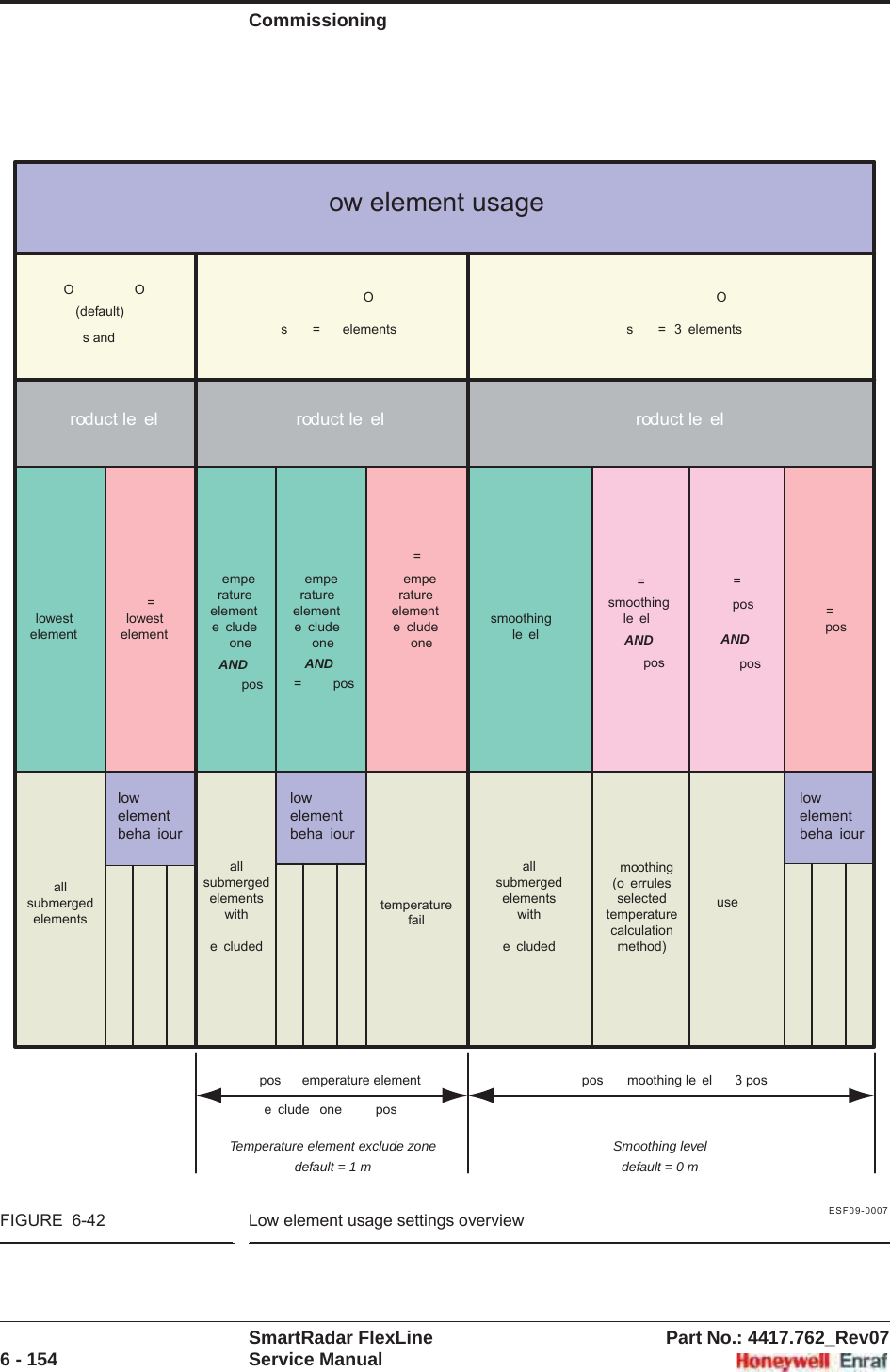
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 155W&M Sealing1: This board can be electronically sealed via the software. A Notified Body can set his password via [W&M notified body seal password]. He can apply the seal by setting [W&M seal]. Here some data logging is filled in and the related password. This requires a W&M module for Engauge.If the primary value of the product temperature is completely valid, then a W&M indication will be set (e.g. visible in SmartView).Unsealing: give the [W&M unseal level 1] and [W&M unseal the level 2]commands successively.History can be made visible via [W&M seal history].6.11.4 Commissioning6.11.4.1 Commissioning Parameters for 1 or 2 RTDs (3- and 4-wire) Temperature Calcula-tionsNOTE: Make sure the RTD/MPT jumper is set to RTD.☛The following entities must be set set by Engauge or SmartView for a correct functioning of the FII-RTD module in an instrument. The default values are available after initialization of the non-volatile memory.1. Weights & Measures Sealing.Name Explanation Value Range Default[Lowest element offset] The distance from tank zero till the first RTDfloating point number:<-x.x .. +x.x><80.0>[Second element offset]if applicableThe distance from tank zero till the second RTDfloating point number: <-x.x .. +x.x><0.0>[Number of elements] The number of RTDs used <1..2> <0>[Element type] The type (material) of the used RTDs<Pt100 large + small><Ni191><PtCu100><Cu100><Cu90 enraf + beacon + weston/solartron/nulectrohms><Sangamo MRT><Sangamo spot><No type>[Measurement type] Selects RTDs, MPT, or MRT.<RTD 3wire><RTD 4wire><MPT><MRT><No type>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-211.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 156 Service Manual6.11.4.2 Commissioning Parameters for MPT Temperature CalculationsNOTE: Make sure the RTD/MPT jumper is set to MPT.☛The following entities must be set set by Engauge or SmartView for a correct functioning of the FII-RTD module in an instrument. The default values are available after initialization of the non-volatile memory.6.11.4.3 Commissioning Parameters for MRT Temperature CalculationsNOTE: Make sure the RTD/MPT jumper is set to MRT (= MPT position).☛The following entities must be set set by Engauge or SmartView for a correct functioning of the FII-RTD module in an instrument. The default values are available after initialization of the non-volatile memory.[RTD configuration] Selects how the RTDs are positioned.<RTD1 in tank><RTD1 and RTD2 in tank><RTD1 in tank and RTD2 ambient> <RTD1 ambient><No configuration>Name Explanation Value Range Default[Lowest element offset] The distance from tank zero till the bottom of the probefloating point number:<-x.x .. +x.x><80.0>[Number of elements] The number of elements used<1..6> <0>[Element type] The type (material) of the used RTDs<Pt100 large + small><Ni191><PtCu100><Cu100><Cu90 enraf + beacon + weston/solartron/nulectrohms><Sangamo MRT><Sangamo spot><No type>[Measurement type] Selects RTDs, MPT, or MRT.<RTD 3wire><RTD 4wire><MPT><MRT><No type>[MPT sensor length] The length of the MPT probefloating point number:<-x.x .. +x.x><80.0>Name Explanation Value Range Default](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-212.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 1576.11.4.4 Commissioning Parameters for All Types of Probes6.11.4.4.1 Engauge *Product temperature* Tab☛The following entities can be set set by Engauge or SmartView for a specific functioning of the FII-RTD module in an instrument. The default values are available after initialization of the non-volatile memory; so check each entity for its correctness.Name Explanation Value Range Default[Lowest element offset] The distance from tank zero till the bottom of the probefloating point number:<-x.x .. +x.x><80.0>[Number of elements] The number of elements used<1..6> <0>[Element type] The type (material) of the used RTDs<Pt100 large + small><Ni191><PtCu100><Cu100><Cu90 enraf + beacon + weston/solartron/nulectrohms><Sangamo MRT><Sangamo spot><No type>[Measurement type] Selects RTDs, MPT, or MRT.<RTD 3wire><RTD 4wire><MPT><MRT><No type>Name Explanation Value Range Default[Product immersion depth] The minimum required product level distance above an element before this element is taken into account in the average product temperature calculationfloating point number:<-x.x .. +x.x><0.5>[Hysteresis] This is a hysteresis mechanism distance around the switching points of the elements that are taken into account in the calculation.floating point number:<-x.x .. +x.x><0.1>](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-213.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 158 Service Manual[High High alarm][High Alarm][Low Alarm][Low Low alarm]4 thresholds for activating a related alarm status in the Primary Valuefloating point numbers:<-x.x .. +x.x><1.0E22>[Alarm test enable] Enables (if activated, see next listed entity) the simulation of one of the 4 alarms for a minute, by simulating the actual measured Primary Value is slightly below or above the alarm threshold.<enable><disable><disable>[Alarm test] Activates and selects at the same time the Alarm test (if enabled with the [Alarm test enable] listed before, and the 4 alarm thresholds are properly set).<No Alarm><High High alarm><High Alarm><Low Alarm><Low Low alarm><No Alarm>[Function identification] The current module’s function name. This function is visible on the SmartView display.13 characters <Product temp.>[Element offset] Each element can individually be given an offset.floating point numbers:<-x.x .. +x.x><0.0>[Element weighing factor] Each element can individually be given a weighing factor, which is applicable if the calculation method is CUSTOM.floating point numbers:<-x.x .. +x.x><1.0>[Gauge temperature scale] Determines whether the IPTS-68 or ITS-90 scale is used.<IPTS-68><ITS-90><ITS-90>[Low element usage] See FIGURE 6-42 <No Exclusion><Static Exclusion> <Dynamic Exclusion><No Exclusion>[Low element behaviour] See FIGURE 6-42 <Temp To Fail><Temp To Last Valid><Temp Use First Element><Temp Use Second Element><Temp To Fail>[Temperature element exclude zone]See FIGURE 6-42 floating point number:<-x.x .. +x.x><1.0>Name Explanation Value Range Default](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-214.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 159[Smoothing level] See FIGURE 6-42 floating point numbers:<-x.x .. +x.x><0.0>[MPT element position mode][Only for MPT] Determines whether the element positions are automatically calculated (based on sensor length) or manually entered.<Automatically><Manually><Automatically>[RTD element positions][Only for MPT] If MPT element position mode is MANUALLY then here the positions can be filled in.floating point numbers:<-x.x .. +x.x><0.0>[Averaging constant filter] Enables or disables a averaging constant filter.<enable><disable><enable>[Averaging constant] Value of how much of the old calculated value is used with respect to the new calculated value<0.0 .. 1.0> <0.9>[Temperature range check] Enables or disables the fact that an element which is outside a temperature range will lead to temperature fail.(See also FIGURE 6-41.)<enable><disable><disable>[Element skipping] Enables or disables the fact that elements can be skipped if an element is outside a temperature range.<enable><disable><disable>[Maximum skipped elements] The number of elements that can be skipped<1,2> <1>[Median filter] Enables or disables a median filter of 5 levels deep (spike filtering).<enable><disable><enable>[Temperature calculation method] The way the average temperature is calculated (see also features above)<Standard><Custom><Enhanced><Enhanced>Name Explanation Value Range Default](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-215.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 160 Service Manual6.11.4.4.2 Engauge * Vapour temperature * TabNOTE: Some settings for vapour temperature calculations are shared via the product temperature settings.☛The following entities can be set by Engauge or SmartView for a specific functioning of the FII-RTD module in an instrument. The default values are available after initialization of the non volatile memory; so check each entity for its correctness.[MRT length table][Only for MRT] Specifies whether a fixed range of MRT resistors is used (= <F> ) or user configured lenghts (= <T>).Fixed lengths are:0.65, 1.25, 1.95, 2.85, 4.15, 5.651 character<F><T><F>[MRT element length used if MRT length table is 'T'][Only for MRT]The lengths of the MRTs including anchor eyefloating point numbers:<-x.x .. +x.x><0.0>Name Explanation Value Range Default[Gas immersion depth] The minimum required distance below an element before it is taken into account in the average vapour temperature calculationfloating point number:<-x.x .. +x.x><0.5>[High High alarm][High Alarm][Low Alarm][Low Low alarm]4 Thresholds for activating a related alarm status in the Primary Valuefloating point numbers:<-x.x .. +x.x><+1.0E22>[Alarm test enable] Enables (if activated, see next listed entity) the simulation of one of the 4 alarms for a minute, by simulating the actual measured Primary Value is below or above the alarm threshold.<enable><disable><disable>Name Explanation Value Range Default](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-216.png)
![CommissioningPart No.: 4417.762_Rev07 SmartRadar FlexLineService Manual 6 - 1616.11.4.4.3 Engauge * Ambient temperature * TabNOTE: Some settings for ambient temperature calculations are shared via the product temperature settings.☛The following entities can be set by Engauge or SmartView for a specific functioning of the FII-RTD module in an instrument. The default values are available after initialization of the non volatile memory; so check each entity for its correctness.[Alarm test] Activates and selects at the same time the Alarm test (if enabled with the [Alarm test enable] listed before, and the 4 alarm thresholds are properly set).[No Alarm][High High alarm][High Alarm][Low Alarm][Low Low alarm]<No Alarm>[Function identification] The name of the current function of this module. This name is visible on the SmartView.13 characters <Vapour temp.>Name Explanation Value Range Default[High High alarm][High Alarm][Low Alarm][Low Low alarm]4 Thresholds for activating a related alarm status in the Primary Valuefloating point numbers:<-x.x .. +x.x><+1.0E22>[Alarm test enable] Enables (if activated, see next listed entity) the simulation of one of the 4 alarms for a minute, by simulating the actual measured Primary Value is below or above the alarm threshold.<enable><disable><disable>[Alarm test] Activates and selects at the same time the Alarm test (if enabled with the [Alarm test enable] listed before, and the 4 alarm thresholds are properly set).[No Alarm][High High alarm][High Alarm][Low Alarm][Low Low alarm]<No Alarm>[Function identification] The name of the current function of this module. This name is visible on the SmartView.13 characters <Ambient temp.>Name Explanation Value Range Default](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-217.png)
![CommissioningSmartRadar FlexLine Part No.: 4417.762_Rev076 - 162 Service Manual6.11.5 Commissioning Check☛After having checked/set all before listed entities, make surethe [Board Commissioned], the [Product temperature Commissioned], the [Vapour temperature Commissioned], and the [Ambient Temperature Commis-sioned] entities are <True>;the [Board Health], the [Product temperature Health], the [Vapour temperature Health], and the [Ambient Temperature Health] entities are <GOOD>.For viewing the software version, the Engauge Generic tab can be viewed; also a Reset board command can be issued here.NOTE: In the SmartView situation, the Commissioning flag must be ‘G’ and the Health flag must be ‘Y’.](https://usermanual.wiki/Honeywell-Enraf/990SRFL-2/User-Guide-1890481-Page-218.png)