DETECTION MONITORING TECHNOLOGIES AIMSFS-05X AIMS FAST SCAN RADAR SYSTEM (AIMSFS-05X) User Manual AIMS FS Radar I O Manual v1 0
DETECTION MONITORING TECHNOLOGIES, LLC (dba DMT, LLC) AIMS FAST SCAN RADAR SYSTEM (AIMSFS-05X) AIMS FS Radar I O Manual v1 0
Contents
Installation Guide 3
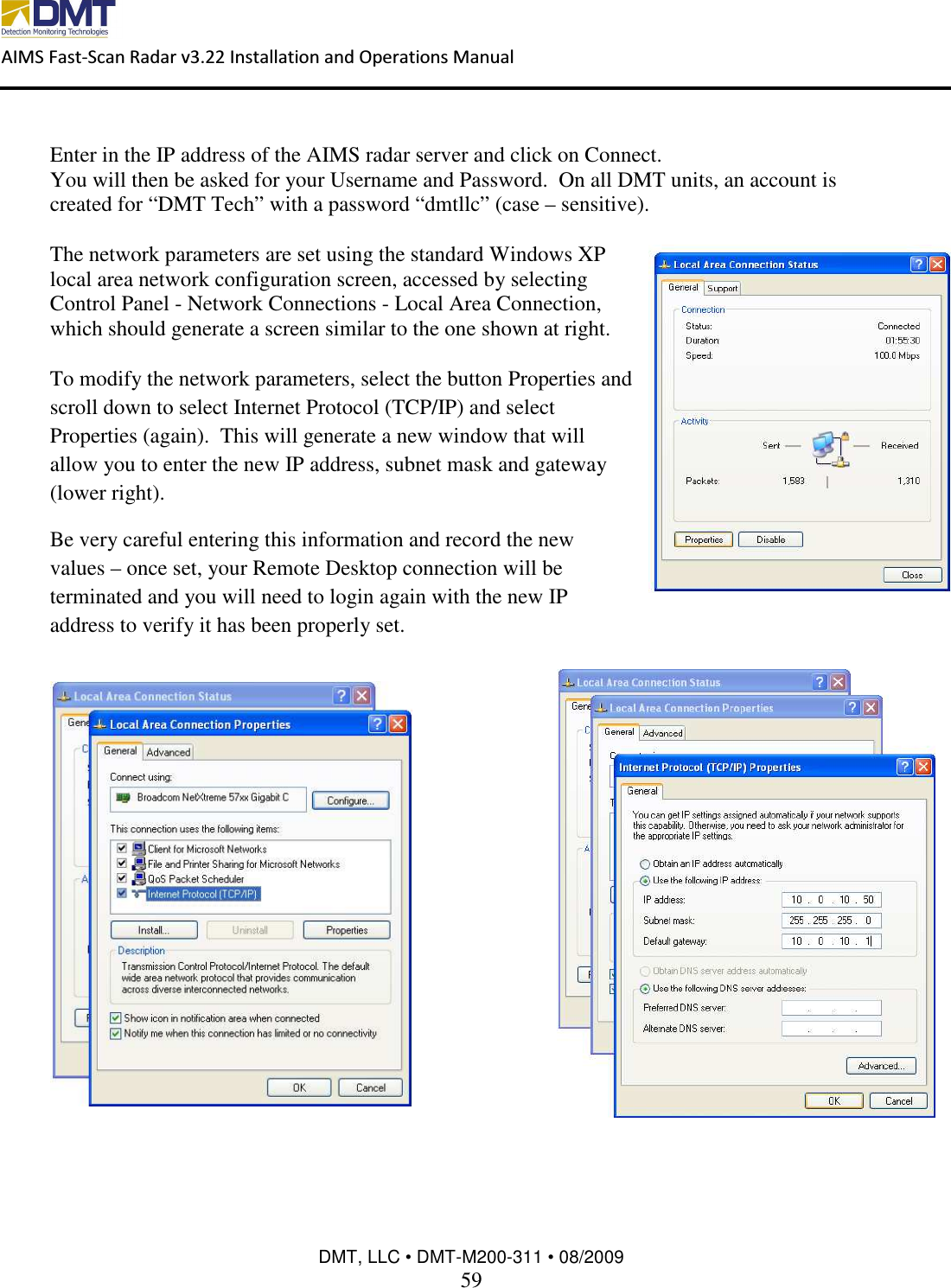
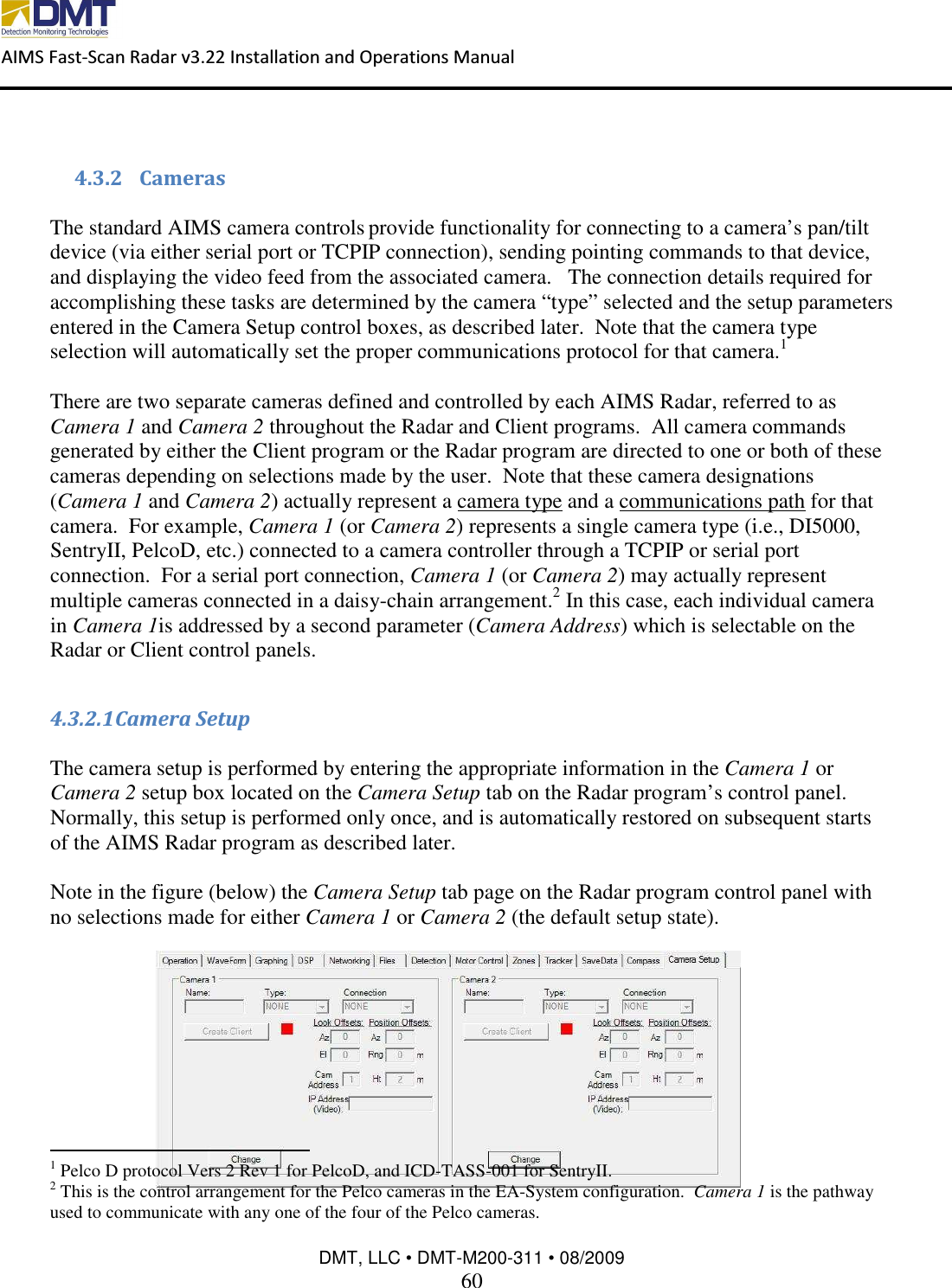
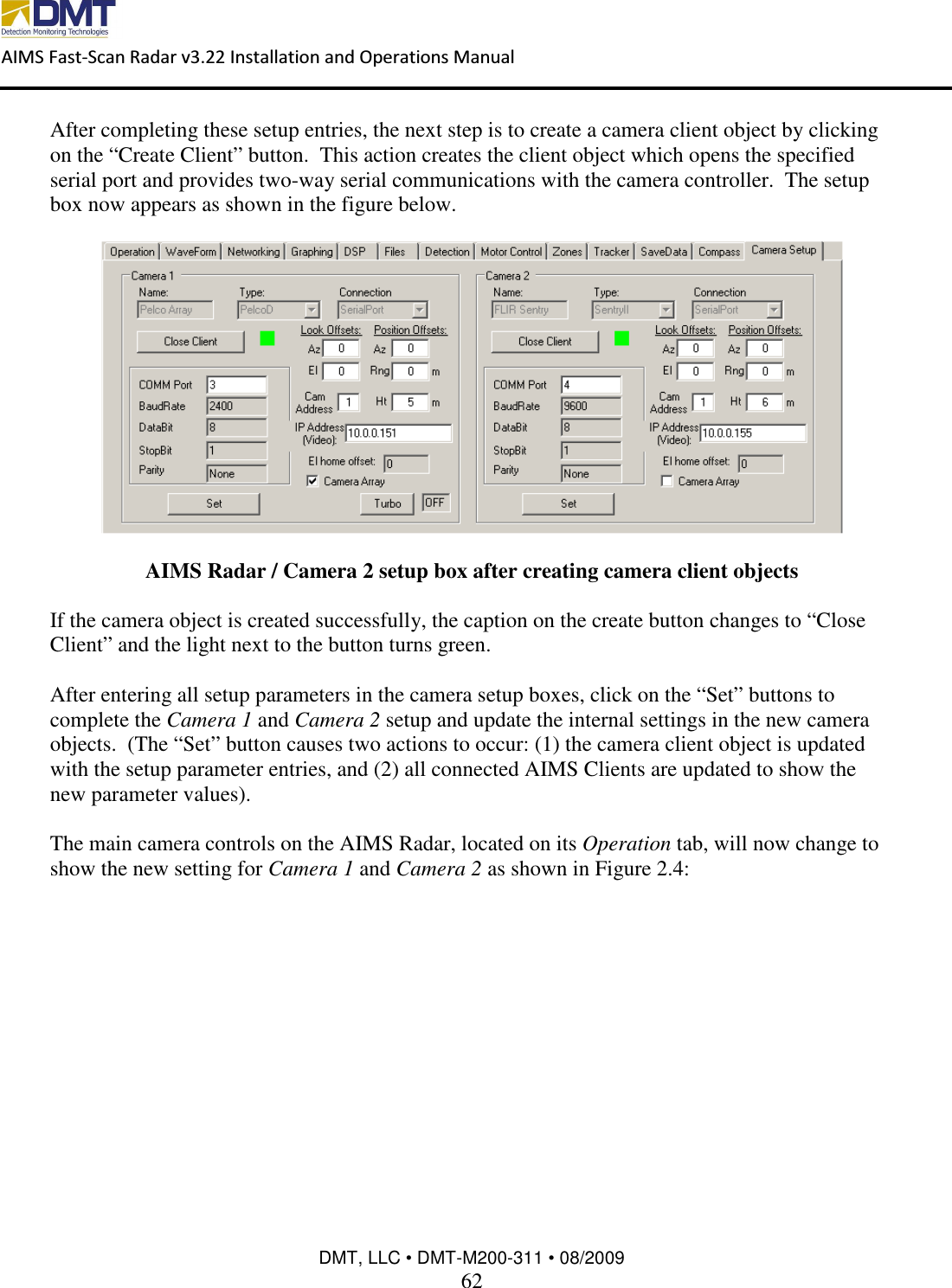
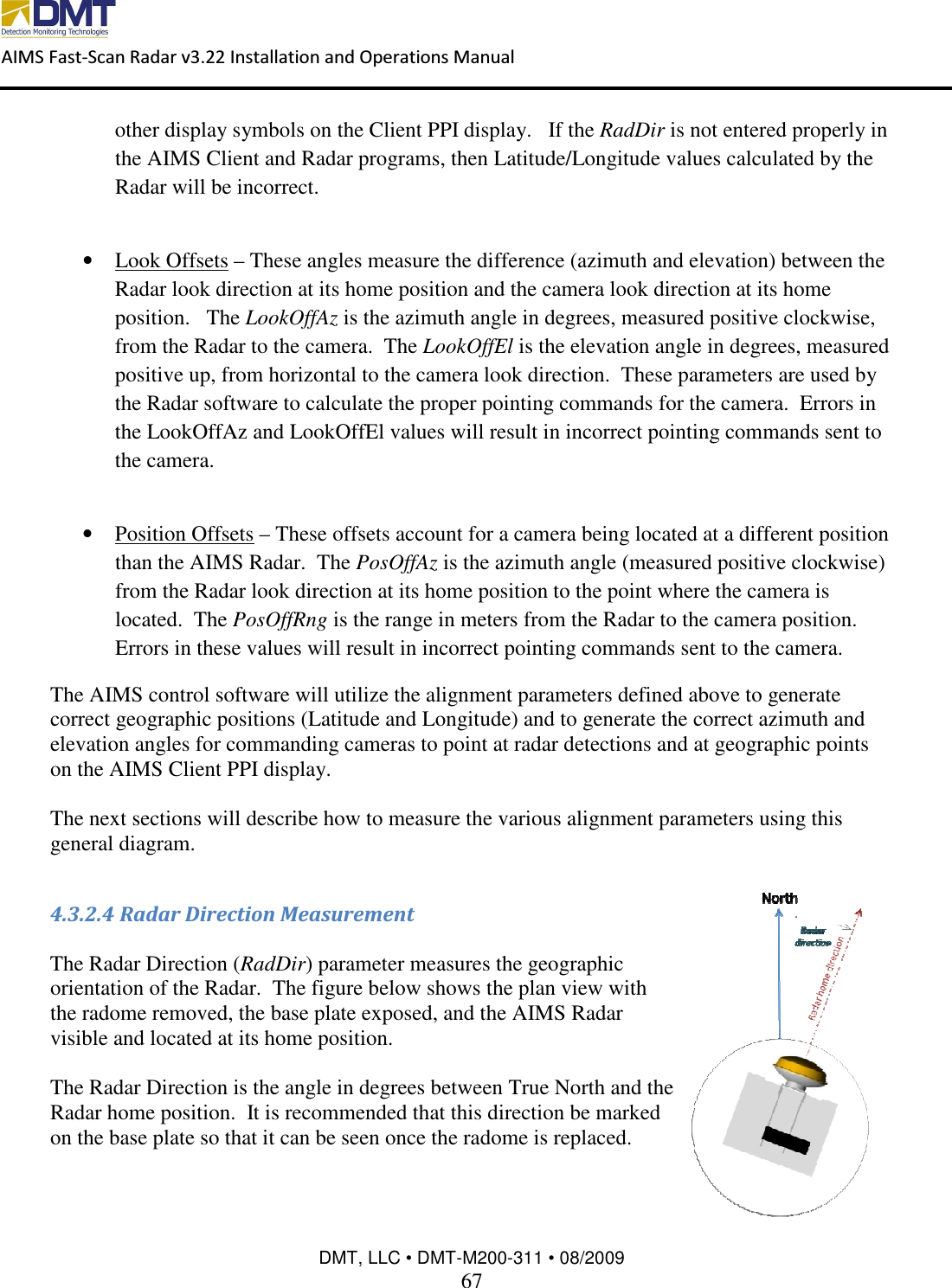
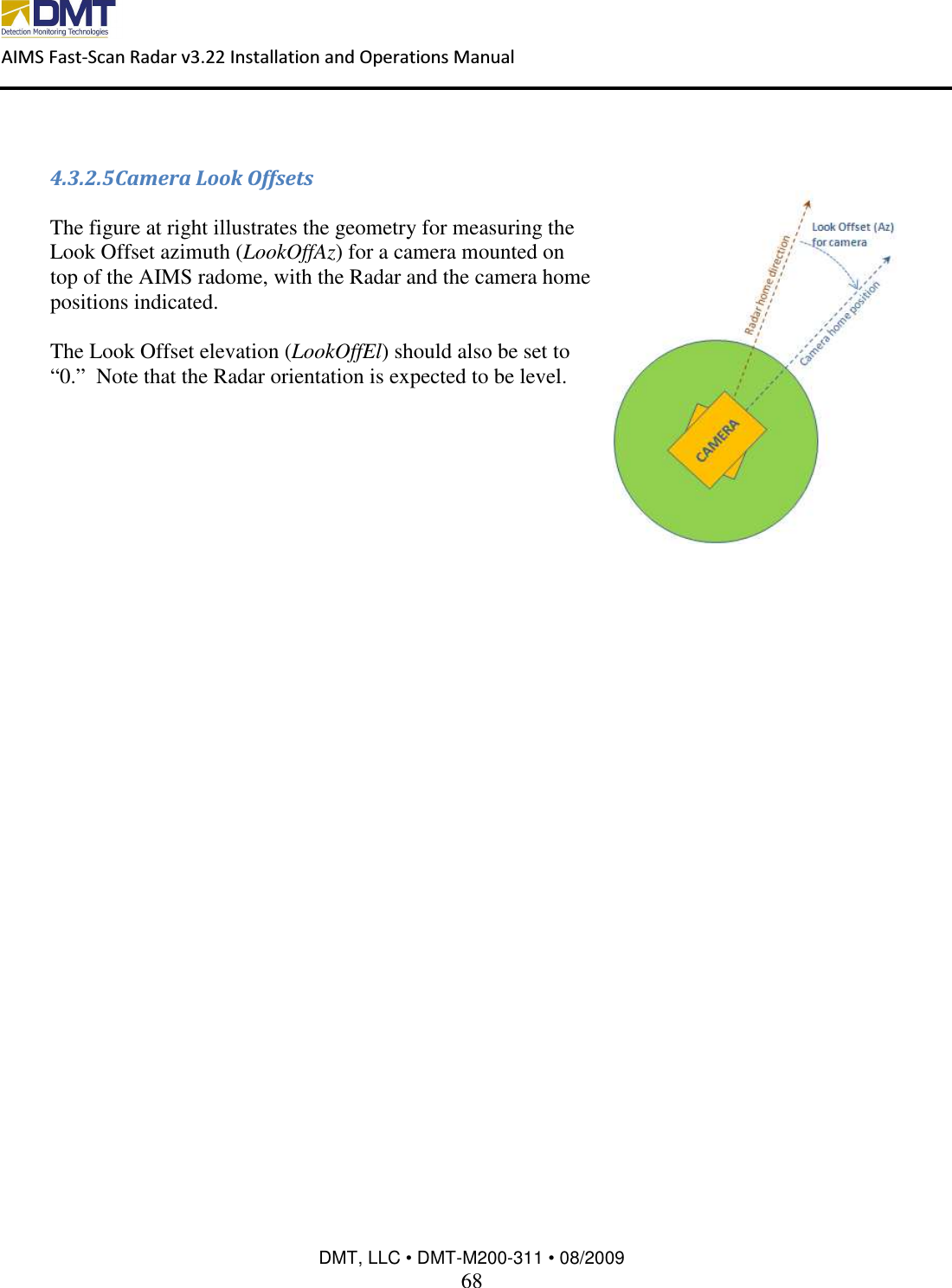
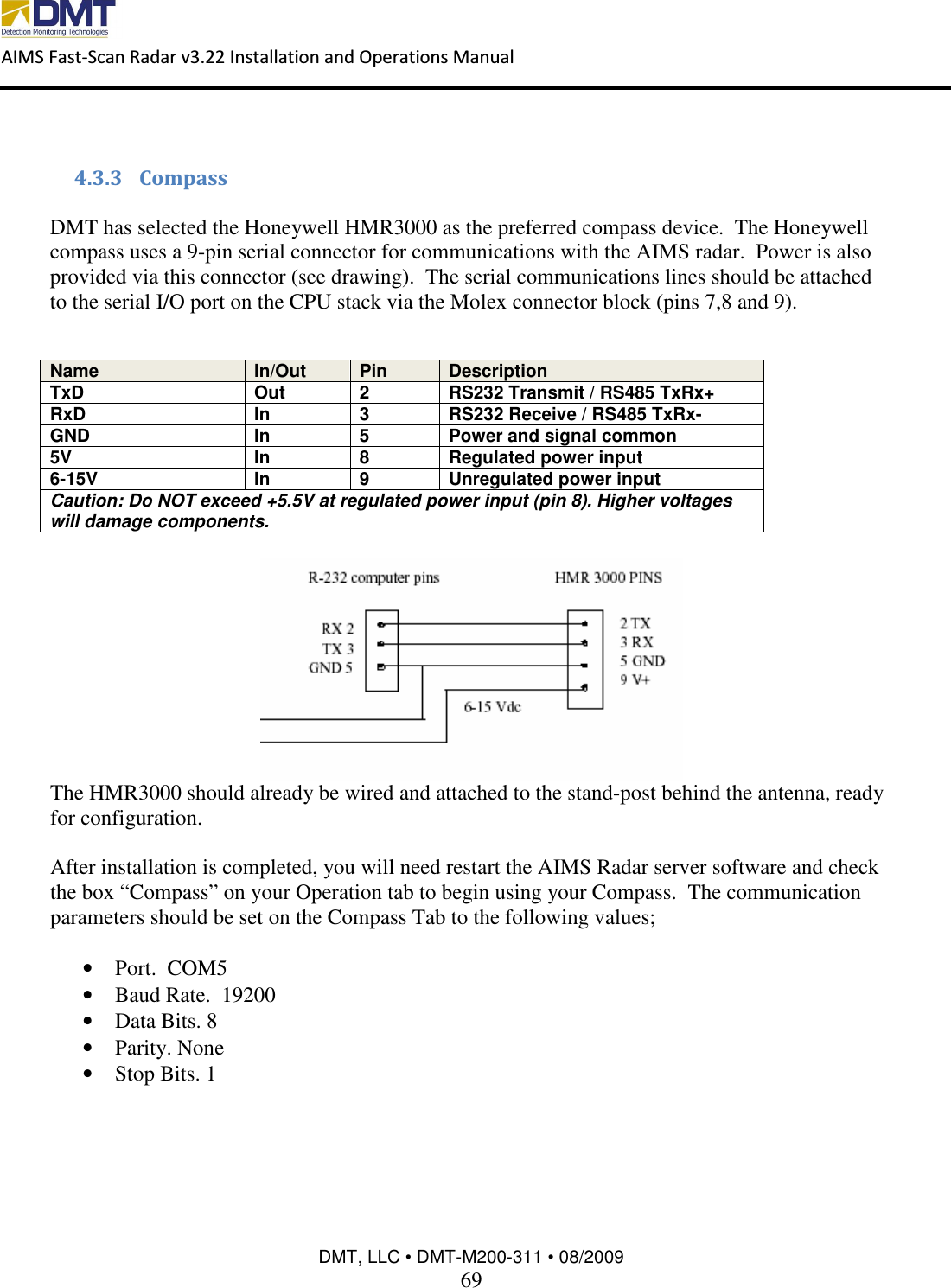
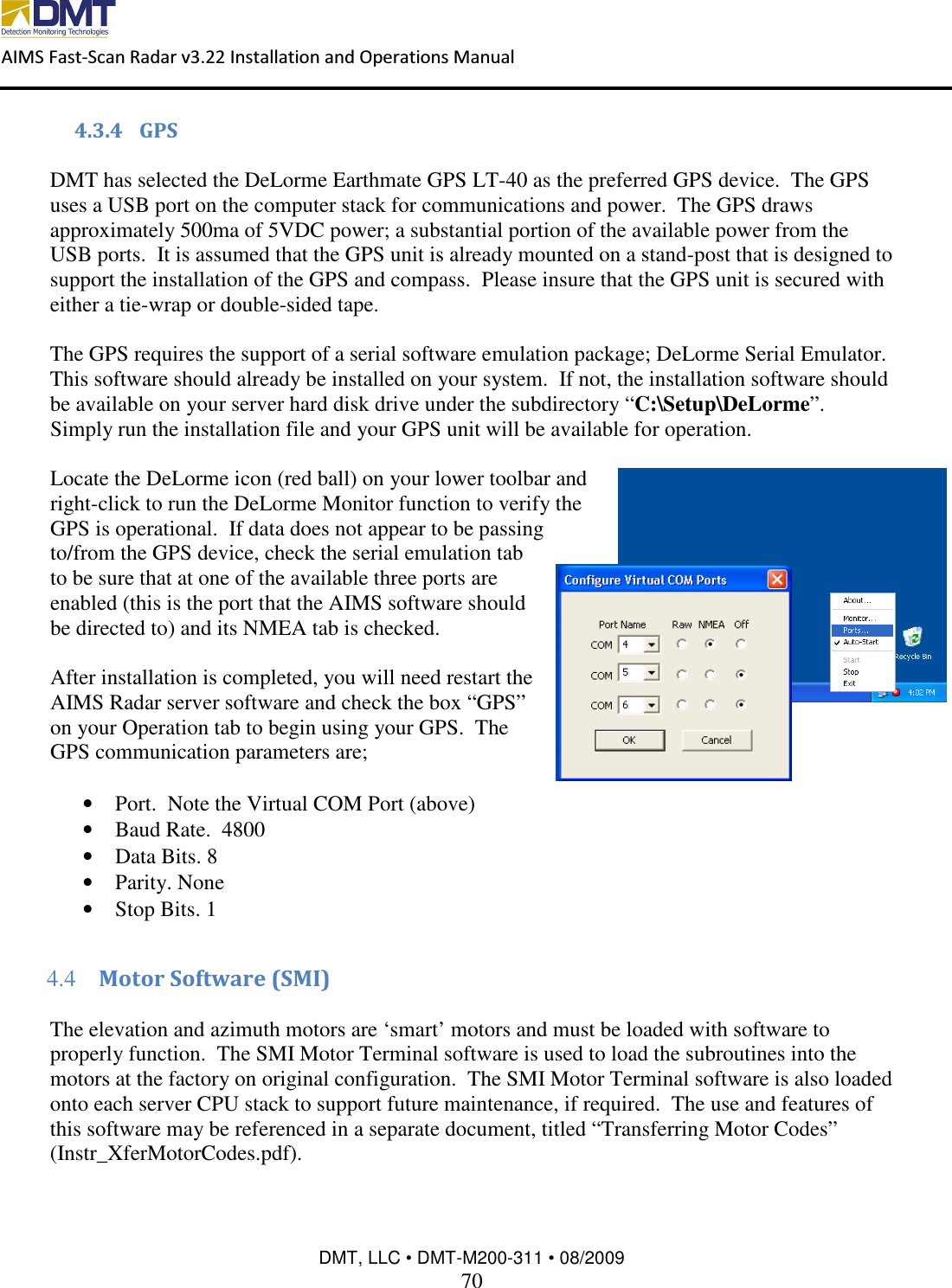

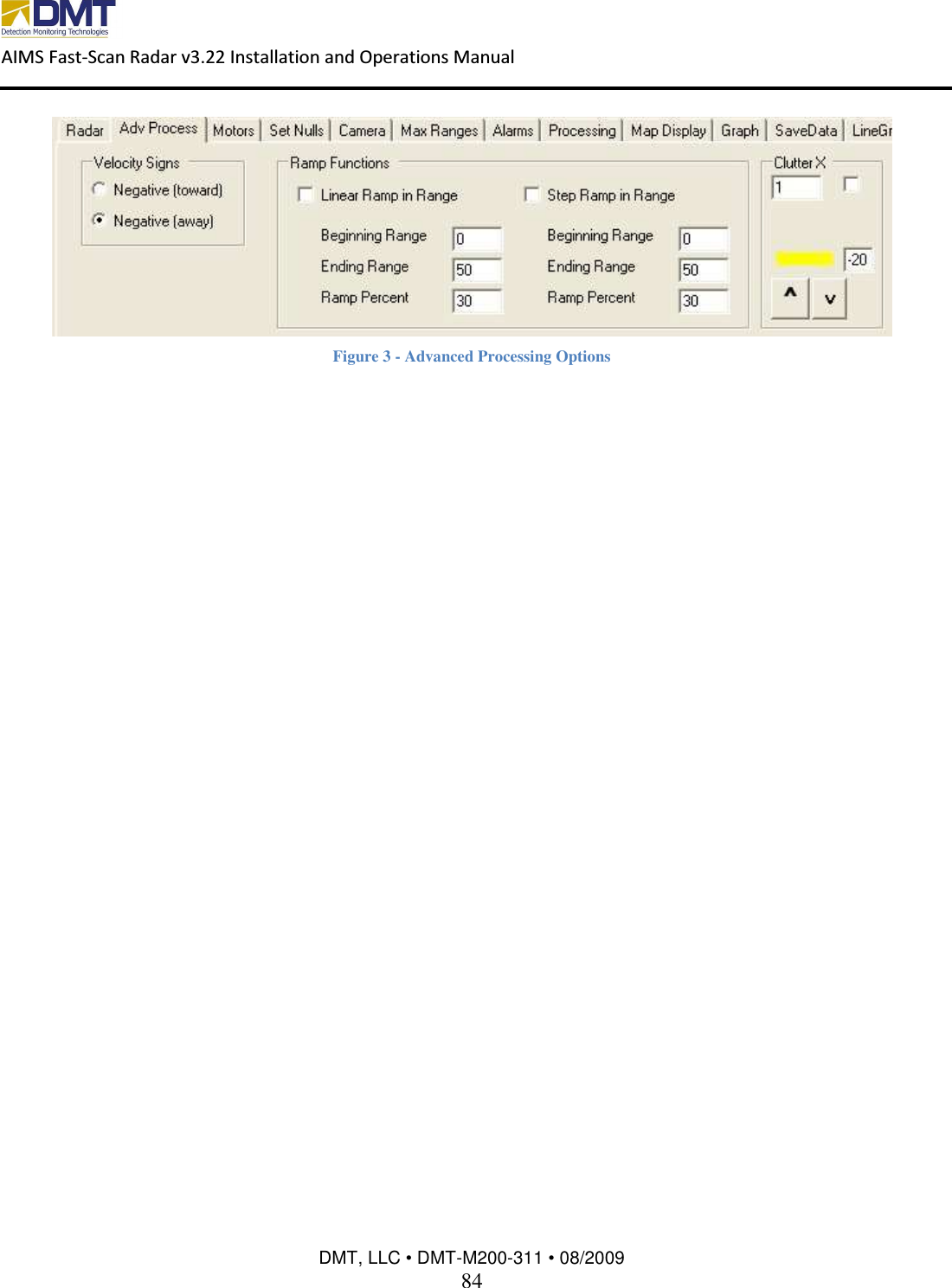
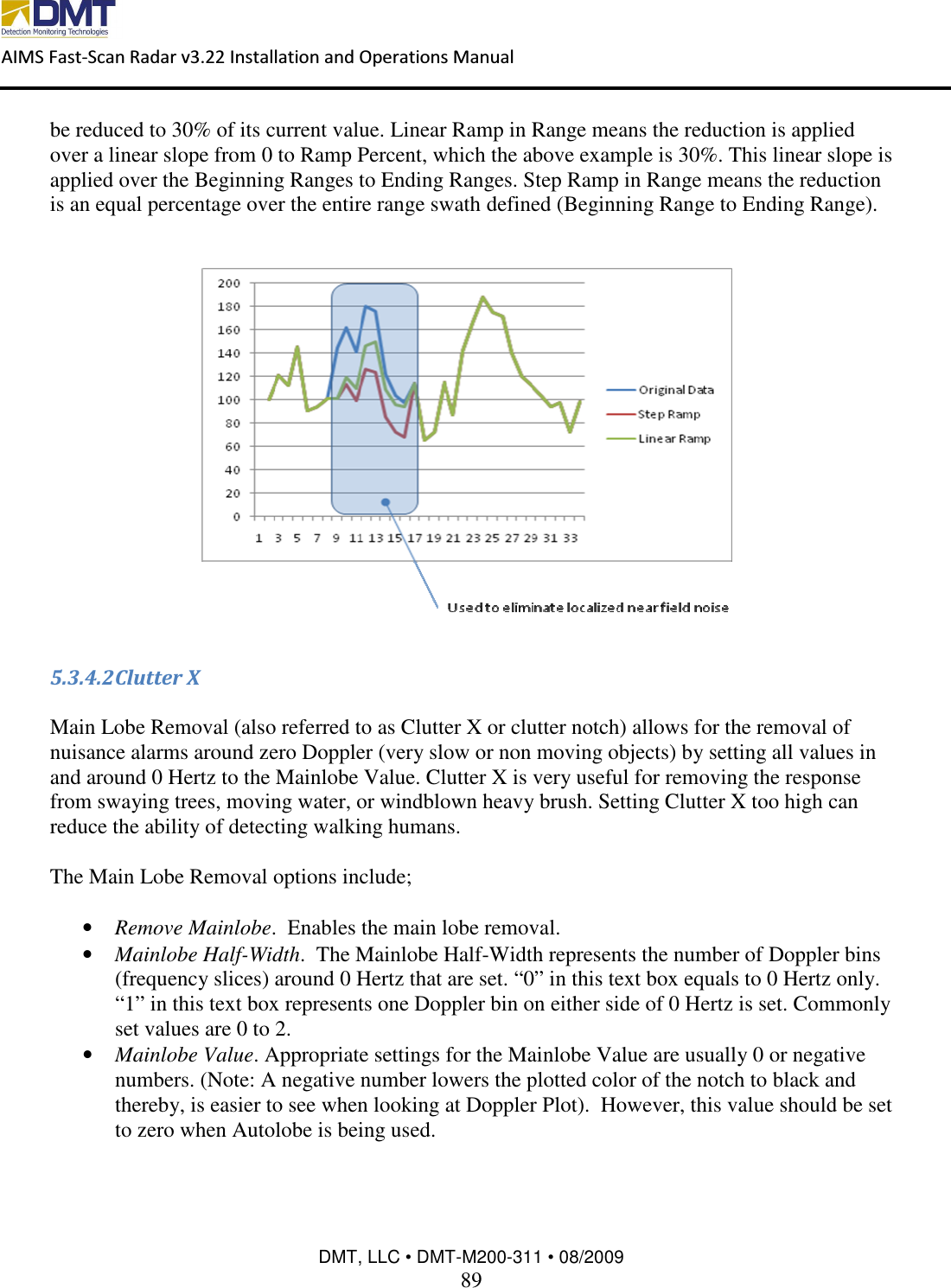
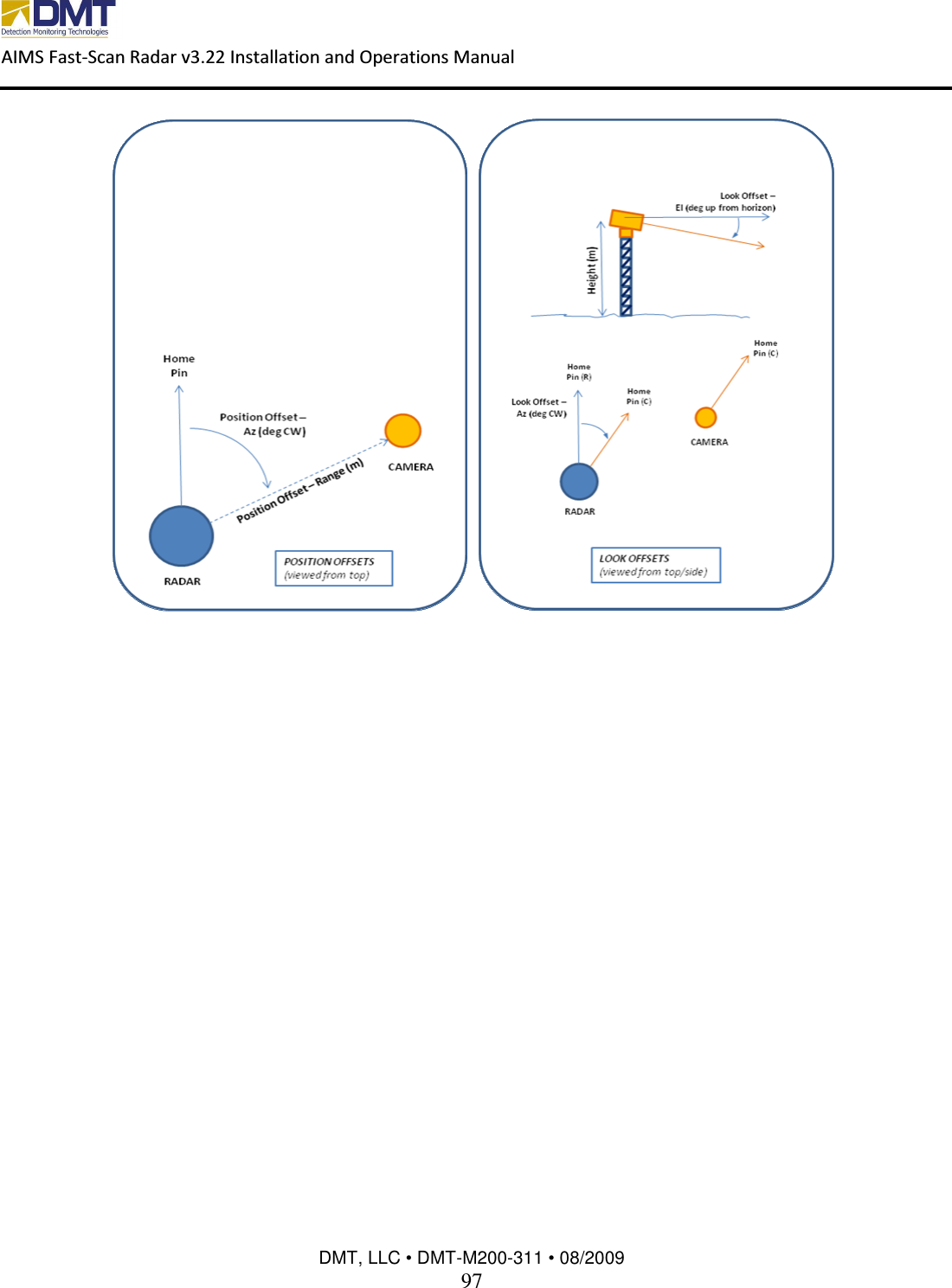
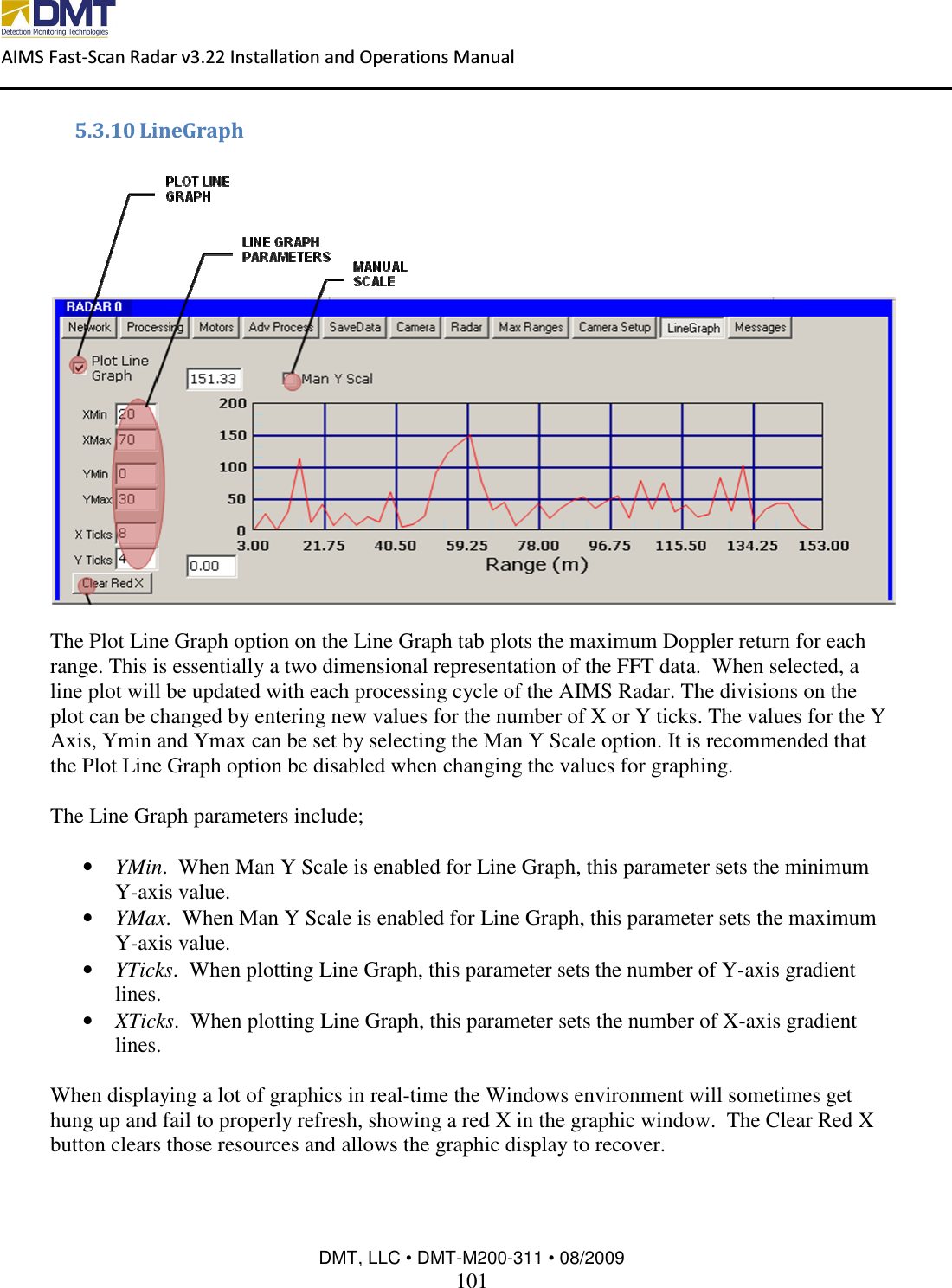
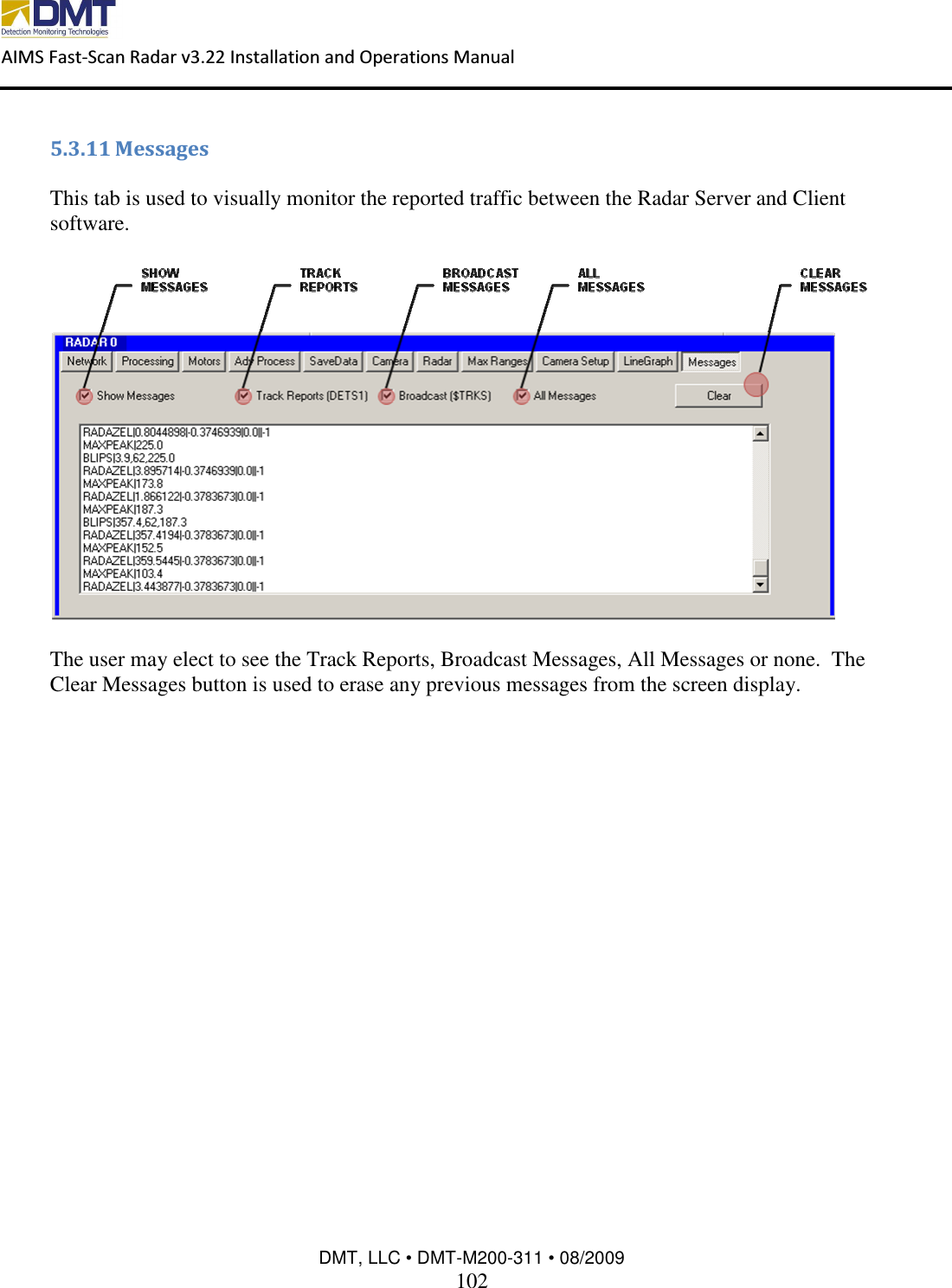
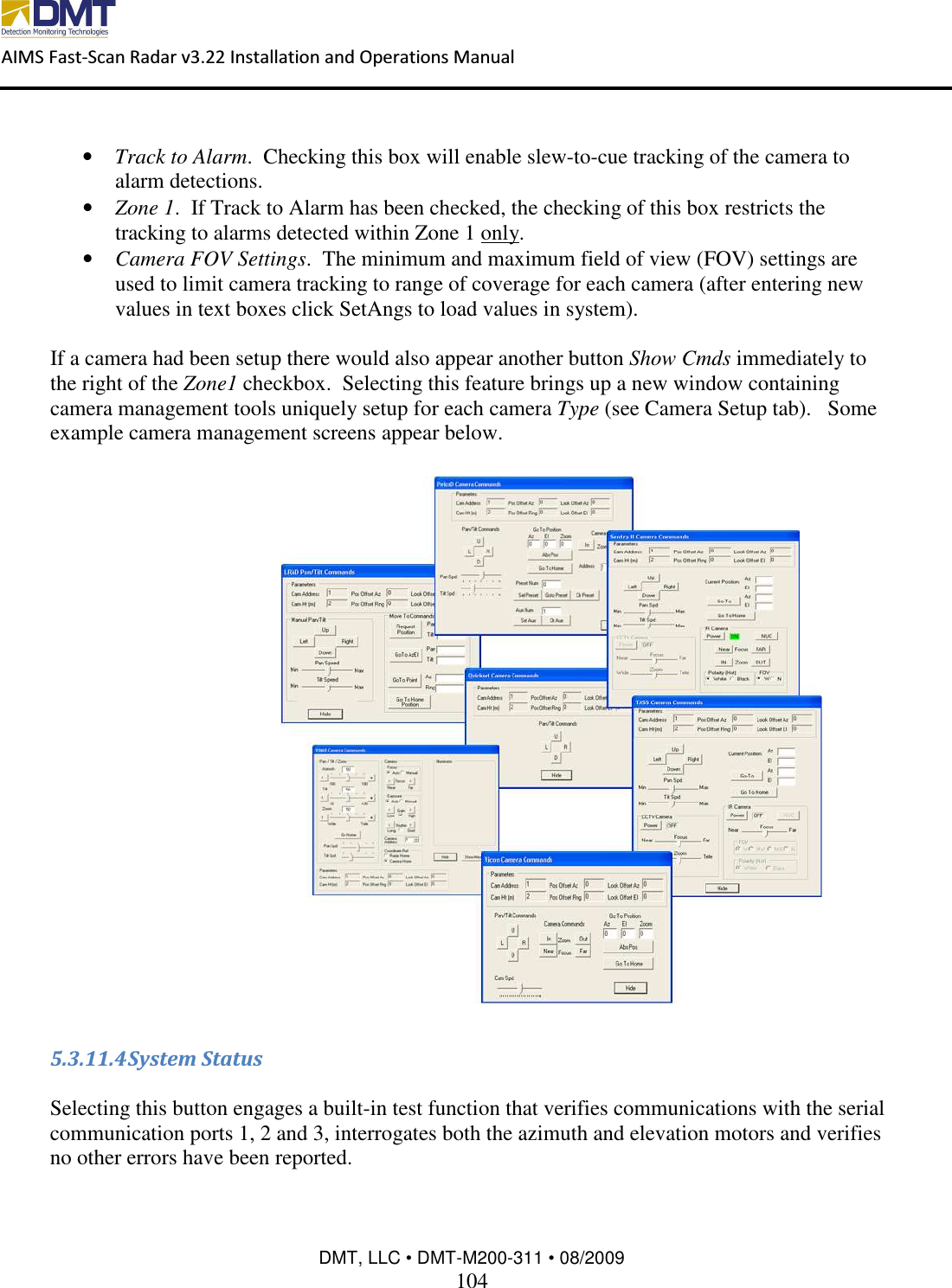
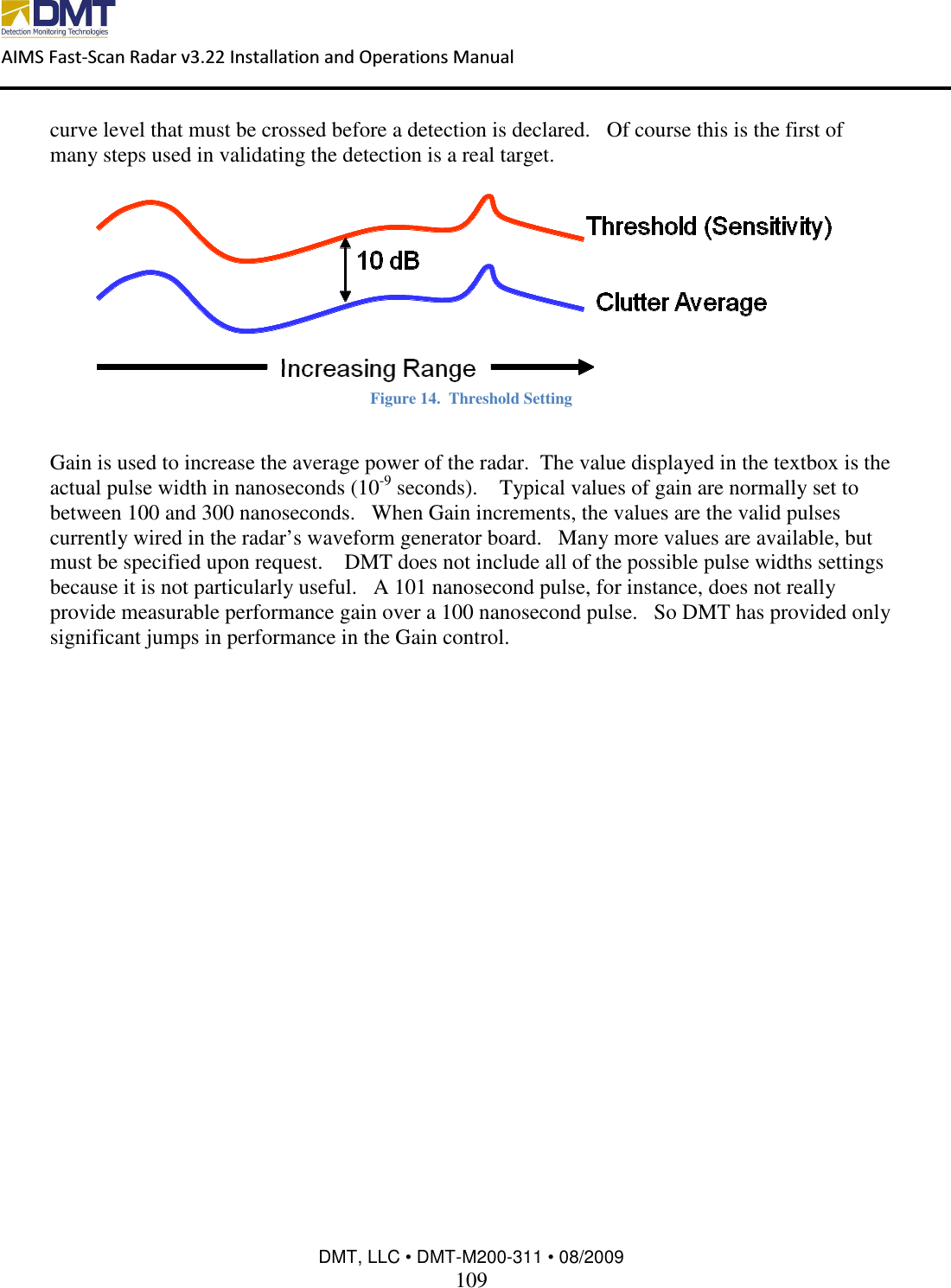
![AIMS Fast-Scan Radar v3.22 Installation and Operations Manual DMT, LLC • DMT-M200-311 • 08/2009 83 The magnitude (strength) of radar signals is normally presented as either linear units (of voltage) or in dB (decibels). Traditionally, dB is used in radar applications because it allows fine details of small signals to be seen with clarity even when very large objects are present. However, DMT uses Linear Mag (linear magnitude) for most site installations. Linear magnitude offers finer control of threshold settings. The units for Sensitivity are set as by the selection of Linear Mag. If checked, Sensitivity increments are in linear units. If not checked, then Sensitivity is adjusted in dB units. Param Info is a read-only section of the Processing Tab. The parameters listed in the box are repeated elsewhere and are included as a reference. Additional Processing and Advanced Processing options shown in Figure 3 provide options to apply Smoothing Filters, Ramp Functions, and ClutterX. The smoothing filters and ramp functions are used to digitally lower signal strength over a given range swath. They are particularly useful for reducing the affects of processing artifacts generated from very large objects located at close ranges. Large objects at close ranges can reflect so much energy that it saturates the radar at that range. Saturation can cause false target detection. Ramp functions lower the signal strength to levels below alarm thresholds. The Beginning Range indicates the first range bin for which the function is applied and the Ending Range indicates the final range bin. The Ramp Percent represents that maximum percentage applied to the measured magnitude (signal strength). So a Ramp Percent value of 30 means that the signal strength will be reduced to 30% of its current value. Linear Ramp in Range means the reduction is applied over a linear slope from 0 to Ramp Percent, which the above example is 30%. This linear slope is applied over the Beginning Ranges to Ending Ranges. Step Ramp in Range means the reduction is an equal percentage over the entire range swath defined (Beginning Range to Ending Range). Clutter X allows for the removal of nuisance alarms around zero Doppler (very slow or non moving objects). Clutter X (sometime referred to as a clutter notch), sets all values in and around 0 Hertz = to the text box in the lower right hand corner. Appropriate settings for this text box are usually 0 or negative numbers. [Note: A negative number lowers the plotted color of the notch to black and thereby, is easier to see when looking at Doppler Plots. ] The number in the upper left corner text box represents the number of Doppler bins (frequency slices) around 0 Hertz that are set. “0” in this text box equals to 0 Hertz only. “1” in this text box represents one Doppler bin on either side of 0 Hertz is set. Commonly set values are 0 to 2. Clutter X is very useful for removing the response from swaying trees, moving water, or windblown heavy brush. Setting Clutter X too high can reduce the ability of detecting walking humans.](https://usermanual.wiki/DETECTION-MONITORING-TECHNOLOGIES/AIMSFS-05X.Installation-Guide-3/User-Guide-1532483-Page-36.png)