B plus B SmartWorx WSM2400 MESH RF loT Module User Manual
B&B; Electronics MESH RF loT Module
UserManual.wiki
>
B plus B SmartWorx
>
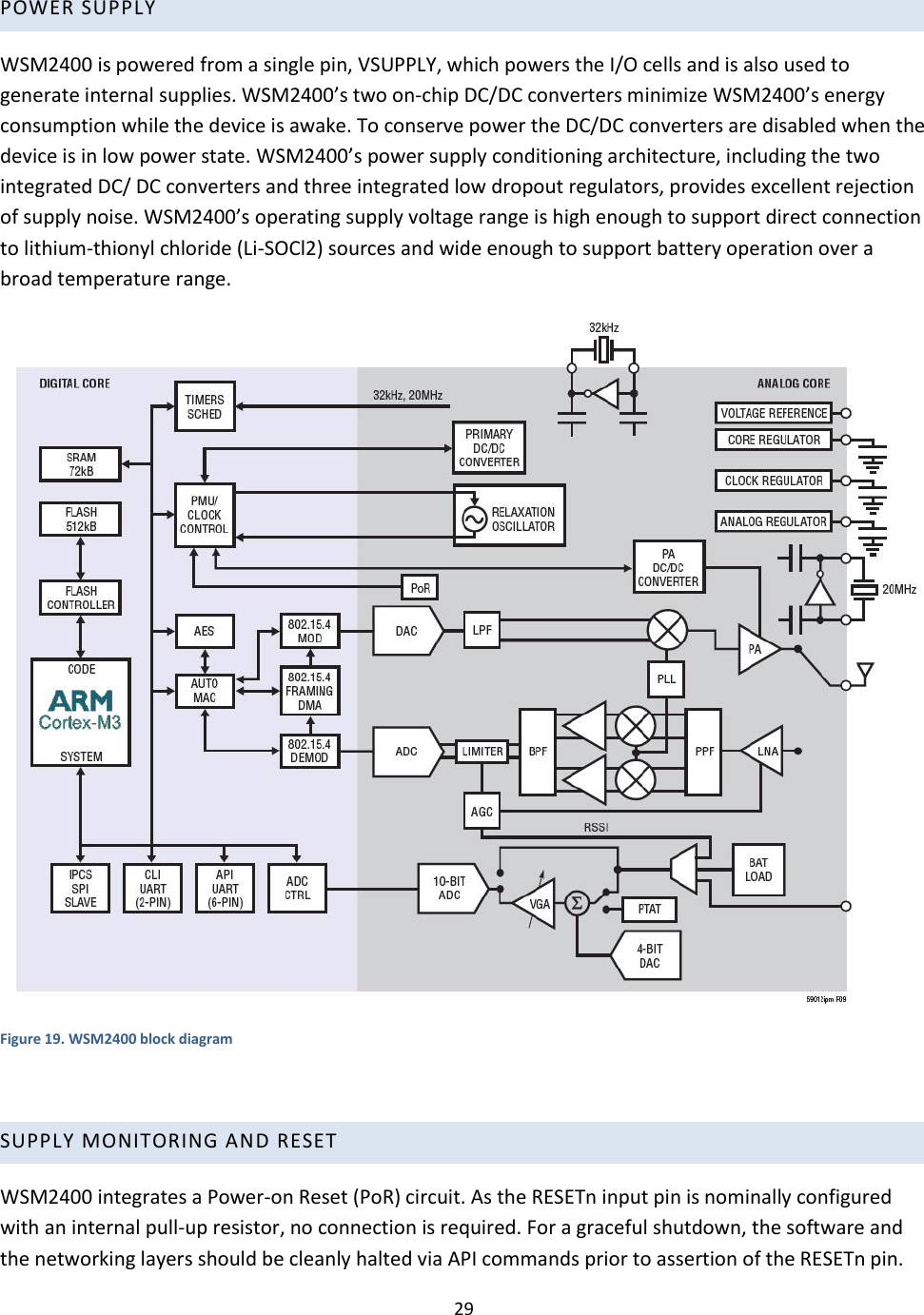
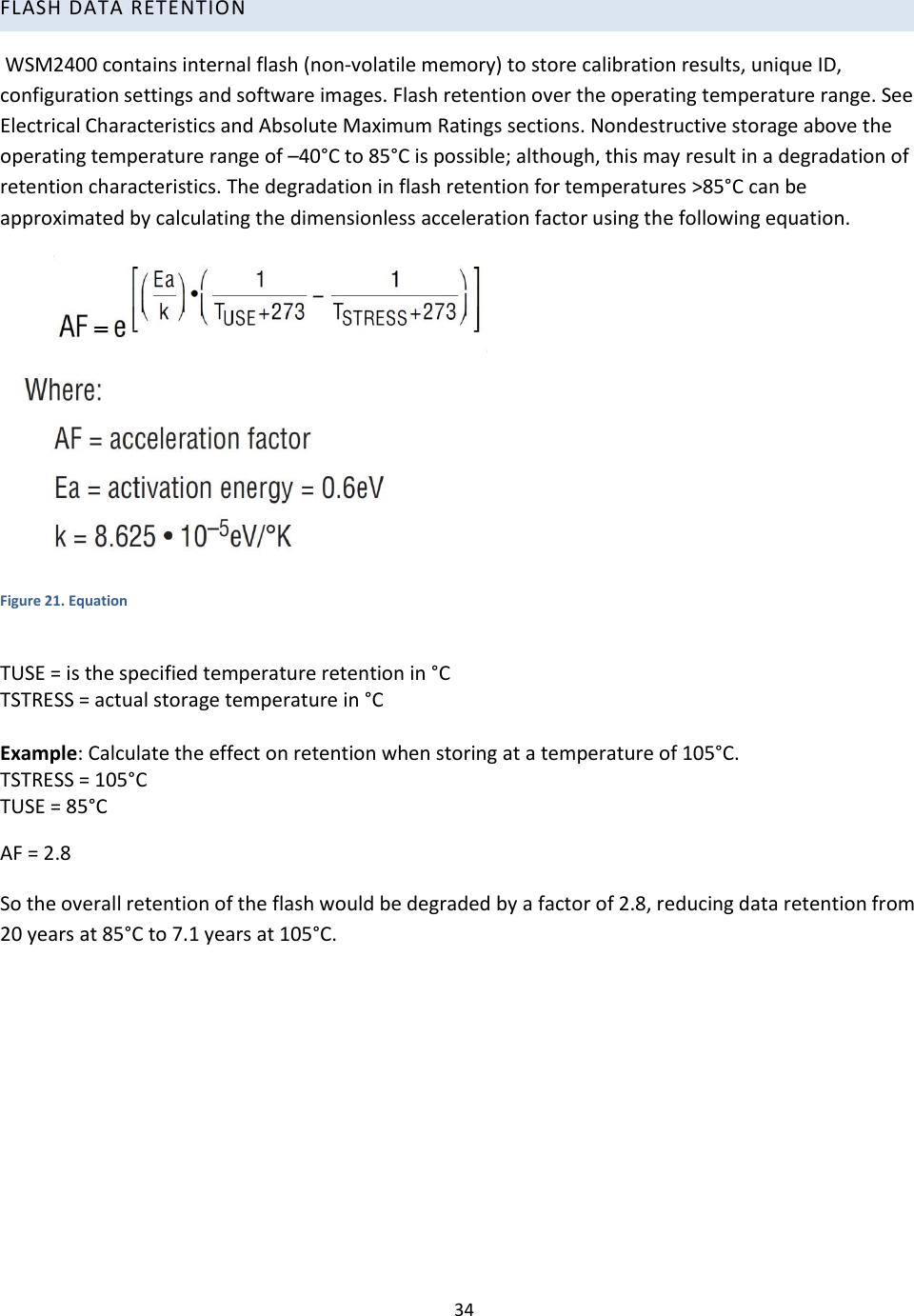
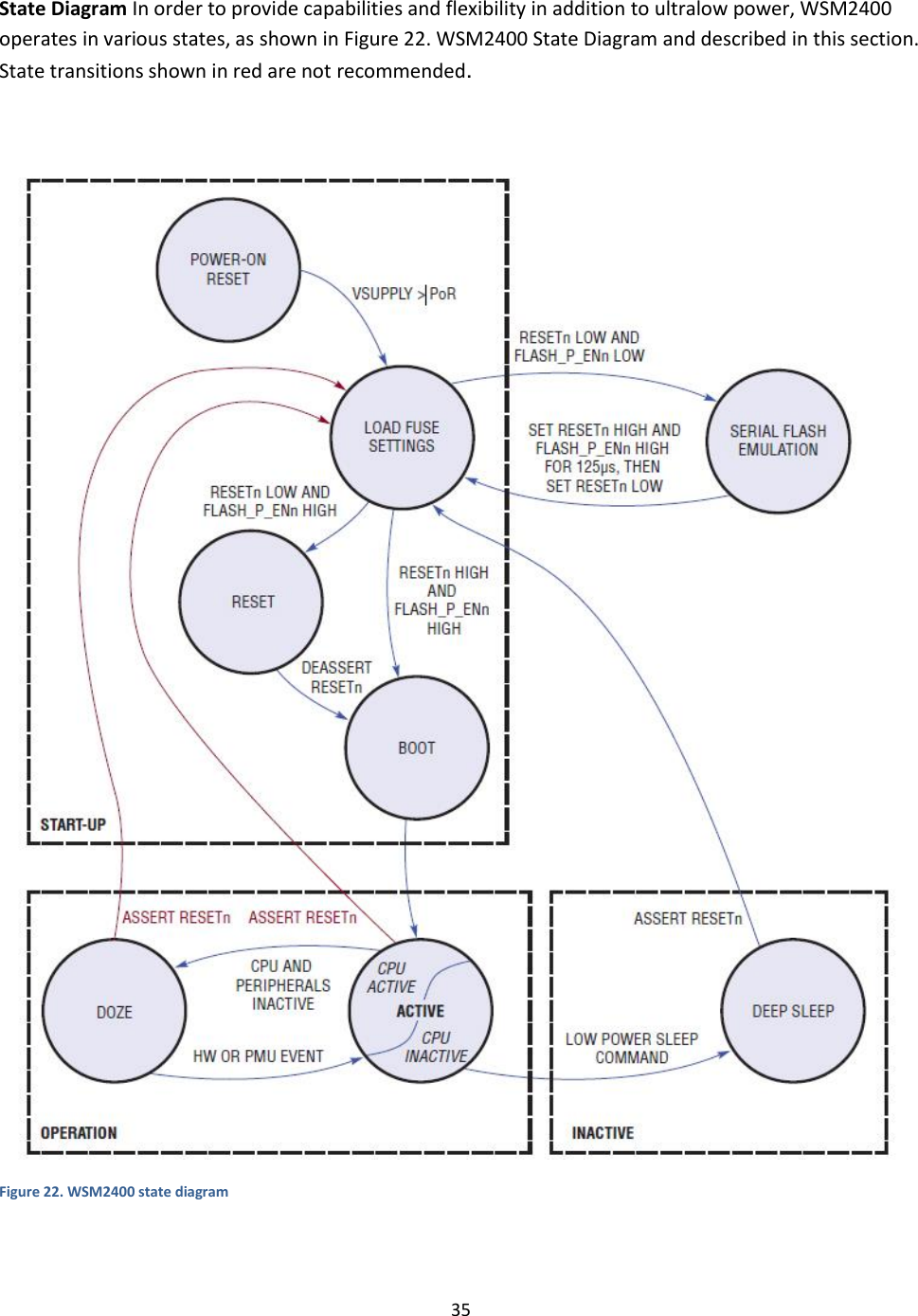
WSM2400 User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation